仿人表情机器人头部系统设计
2014-07-02 01:37:24许向荣宋现春林仪彪
山东建筑大学学报 2014年6期
许向荣,宋现春,林仪彪
(1.山东建筑大学机电工程学院,山东济南,250101;2.山东省高校机械工程创新技术重点实验室,山东济南250100)
仿人表情机器人头部系统设计
许向荣1,2,宋现春1,2,林仪彪1,2
(1.山东建筑大学机电工程学院,山东济南,250101;2.山东省高校机械工程创新技术重点实验室,山东济南250100)
随着人工智能技术的不断发展,具有人机交互功能的智能服务机器人已经成为机器人研究领域一个重要的发展方向,具有表情识别与再现能力的仿人表情机器人已成为该方向研究的热点。文章分析了表情机器人的表情特征及其定义,基于机械设计、传感器技术、电机控制、人工智能以及三维造型等技术对具有表情再现功能的机器人头部机械结构、控制系统及软件系统进行了研究与设计。通过对头部系统的控制与设计,该机器人的头部各器官及其相应的表情控制点可以迅速、精确地到达预定的位置,从而实现各种情感的表达。
仿人;表情机器人;头部系统;舵机;控制系统
0 引言
随着低出生率和老龄化等社会问题的不断加剧,劳动力逐渐匮乏,家庭智能服务机器人则应运而生[1-2],它不仅要具有友好、美观的外观,而且要能与人类进行流畅地情感及信息交流,因此能够表达情感的仿人表情机器人的研究引起了诸多机器人研究者的关注。
在仿人表情机器人的研究领域,国外日本、美国的大学和科研院所开展较早,且研究成果显著。Bartne设计开发了婴儿看护机器人"Kismet"的头部,能够依据眼睛所看到的、耳朵所听到的和大脑所判断的形象地表达婴儿的各种表情[3]。大卫·汉森研究了K-bot女性机器人,可以表达女性面部的复杂表情[4]。日本早稻田大学理工学部高西研究室从1996年起就研发出WE-R系列机器人,其中WE-3RV感觉器官最齐全,WE-4R在此基础上又增加了心理状态模型,能够更加接近人类的情感表达[5]。此外,Miwa H.等设计开发了仿人表情机器人SAYA,它可以识别观察者所表达的某种情绪,表达出与之相应的表情[6]。在国内,仿人表情机器人的研究还处于起步阶段,其中以蔡鹤皋和吴伟国研究的仿人机器人最具代表性。自1996年开始,他们先后研发出了仿人演讲机器人和H&FRobot系列仿人头像机器人,能够表达多种面部表情,具有表情识别与再现机能及初步的人机交互能力[7-8]。柯显信等对仿人面部表情机器人的结构和控制系统进行了设计,并研制了样机SHFR-1,可以较好地实现6种基本表情[9-12]。之后,又对仿人情感交互表情机器人研究现状及关键技术进行了研究,对今后的研究方向提出了几点看法[13]。赵岩青等对面部表情机器人的眉毛机构进行了优化设计,该机构采用4个自由度的并联结构,具有运动灵活,髙拟人化的特点[14]。
综上所述,目前表情机器人的研究存在以下不足:头部各器官的结构设计复杂,不易控制,成本较高,且不够逼真;此外,机器人双眼球、眼睑的动作,如上下、左右及开合等都同步,而非独立。因此,针对以上不足,文章进行了仿人表情机器人的头部系统设计,其外观尺寸类人,实现了双眼及眼睑的相互独立运动。通过头部控制系统,使头部各器官能够快速、准确地到达指定的位置,以表达丰富生动的情感,达到与人类进行自然流畅交流的目的。该表情机器人具有结构简单、易于控制、成本低廉的特点。
1 表情特征分析与定义
设计仿人表情机器人之前,首先要对人类的面部表情和头部运动进行生理学分析。
1.1 表情特征分析
为了形象地量化不同表情下表情控制点的位移,通常采用提取表情特征点的方法来代替控制表情控制点的位移,从而获得相应的表情特征描述[15]。文章采用的表情特征点主要有眉毛、眼睛以及嘴巴等(如图1所示),为了降低头部结构的复杂程度,各器官的特征描述见表1。由表1中可以看出,表情机器人的大部分面部表情都可以通过眉毛、眼睛、嘴巴等6个表情特征点的相对位移变化来描述,从而实现面部表情特征的提取。

图1 面部表情特征点图
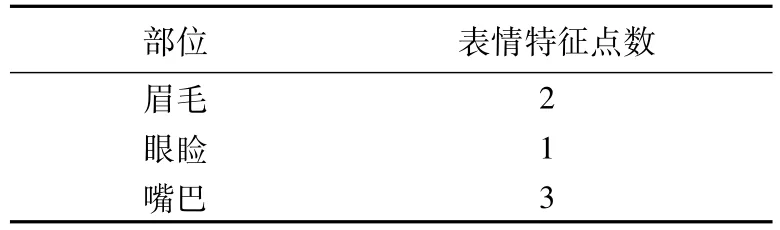
表1 头部机构器官的特征描述
1.2 表情定义
文章所设计的表情机器人的表情动作如下:
高兴时眉毛弯曲,眼睑下眯,嘴巴微张;生气时眉毛外部上扬,眉宇倾斜,眼睛睁大(眼睑向上),嘴巴紧闭;惊讶时,眼睛睁得最大,眉毛内侧上扬,嘴巴张大等。
2 头部机构设计
2.1 头部系统面部机构的实现方法
为了更加逼近人类的面部表情,所设计的表情机器人应该具有与人类相似的面部结构,如眉毛、眼睛、鼻子、嘴巴等表情器官。因此,其头部系统的面部机构的实现方法如下:在其面部肌肤上设计与该单元对应的表情控制点,然后采用驱动机构,如电机或舵机,控制这些表情控制点,通过它们的位移变化组合,实现各种面部表情。
该机器人的头部系统要求能够完成见表2的所有基本动作,包括:眼睑开合,眉毛的移动,眼睛的左右、俯仰运动,嘴巴的开合以及整个头部的转动和点头的动作,即近似接近人类的各种基本动作。
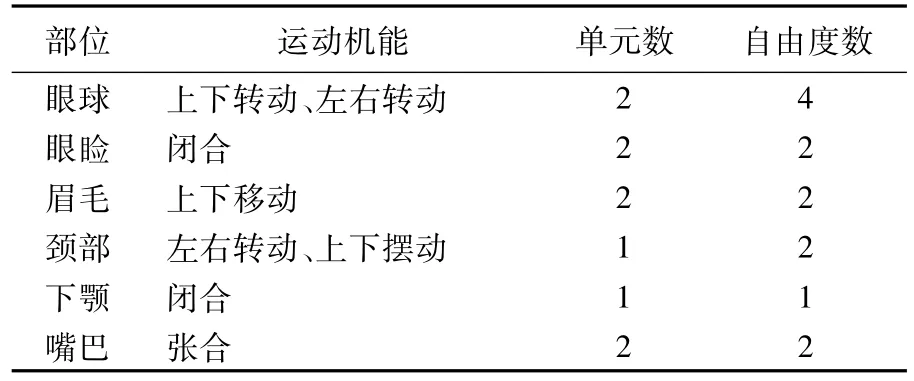
表2 表情机器人各机构的动作
2.2 机械结构总体方案
经过查阅文献,确定了头部系统机械结构的总体方案为:
该头部系统主要包括眉毛、眼睛、眼睑、下颌、颈部五个部分。由于眉毛和眼睑是软质结构,无法直接设计,因此将眉毛、眼睑粘贴在杆件上,利用杆件的运动带动眉毛形变、眼睑移动,完成预期的动作;眼睛的设计虽然比较简单,但是要实现眼睛的转动,必须考虑制作一个组合件,来完成眼睛的转动功能;下颌直接借鉴人的下颌形状,配以合适的驱动装置即可实现;由于颈部主要用于转动和支撑头部,因此采用钢作材料比较合适。在正确选择电机后即可通过电机的尺寸,根据要求设计各个部分的尺寸,形成总体的外形。
2.3 眼眉结构设计
眉毛采用软质材料,采用杆状的结构在其背面塑形,杆状结构与表情控制点相连,用电机控制。当表情变化时,只需控制杆件结构做出简单的移动,带动这种软质的材料变形,达到目的。如图2所示,机器人的每个眼眉都通过1套曲柄导杆机构进行控制,每套机构由驱动舵机、曲柄机构、导杆机构及支撑摆杆四个部分组成。曲柄由舵机驱动其转动,然后通过曲柄上的滑销驱动导杆绕与其固结在一起的轴进行摆动,进而使支撑摆杆带动眼眉控制点运动,从而完成眼眉的上下运动。

图2 眼眉驱动机构图
2.4 眼球结构设计
人类的眼球形状其实为一椭圆球,但为了比较真实地再现眼球的运动,将眼球设计为球体,其运动机构如图3所示,它包括曲柄导杆机构和球铰机构两部分。为了实现两只眼球相互独立的运动,包括上下、左右运动,文章采用曲柄导杆机构实现滑环的转动,然后通过滑轨带动嵌入在滑环槽内的球铰柄一起摆动,从而使眼球实现上下转动。同理,眼球的俯仰运动也是一样的。两眼球的独立运动,由两个舵机分别驱动两个眼球来实现其左右、俯仰转动。
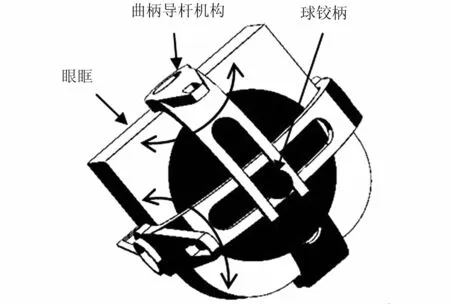
图3 眼球运动机构图
2.5 眼睑结构设计
通过对眼睑的运动进行分析可知,眼睑主要有两种动作,即眨眼和闭眼,也就是眼睑沿着眼球表面进行上下的开闭运动,文章采用了与眼眉机构类似的曲柄导杆机构。考虑到眼睑眨眼的运动速度非常快(约0.3 s),所以在眼睑结构设计中,忽略了下眼睑机构,将眼睑仅设计为单眼睑结构。
2.6 嘴部结构设计
分析人类的嘴部特点可知,人的嘴部分为上颌和下颌两部分,上颌连接头盖骨,保持固定不动,下颌与上颌通过颞下颌关节连接,并绕着该关节上下转动,实现嘴的张开和闭合运动。因此,文章只设计了下颌机构,通过舵机驱动其实现0~45°的摆动,完成嘴的张开和闭合的动作。嘴部结构如图4所示。
2.7 头部机械总体结构
在正确选择电机后,根据要求设计各个部分的尺寸,形成总体结构,如图5所示。文章设计了两个安装座,分别是眼睛安装座和颈部安装座。其中,眼睛安装座用于支撑眼睛、眉毛、眼睑,通过杆件与下颌和颈部连接;颈部安装座用于支撑整个头部机构。
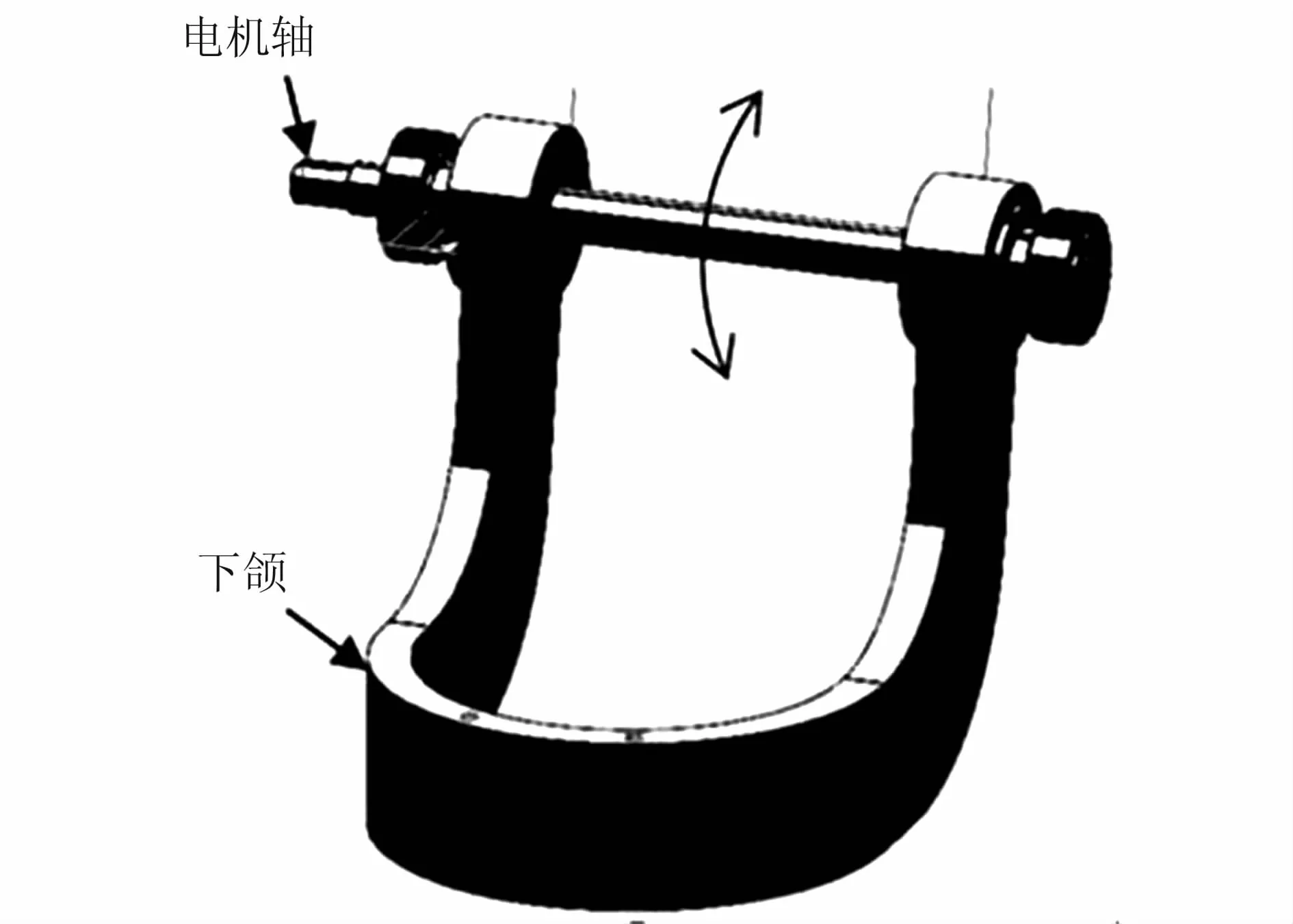
图4 下颌运动机构三维模型图
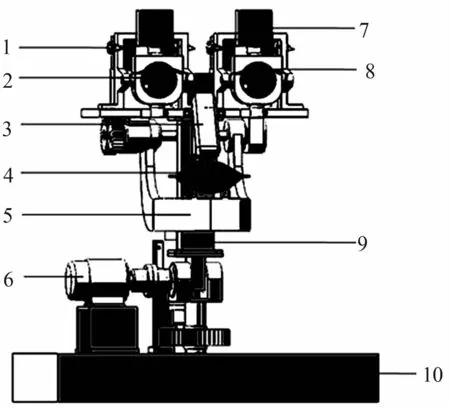
图5 头部结构装配图
3 头部控制系统设计
机器人头部控制系统的总体框图,如图6所示,眼睑、眉毛、眼睛、嘴巴、下颚、点头动作选用舵机进行控制,头部左右转动选择电机进行控制。
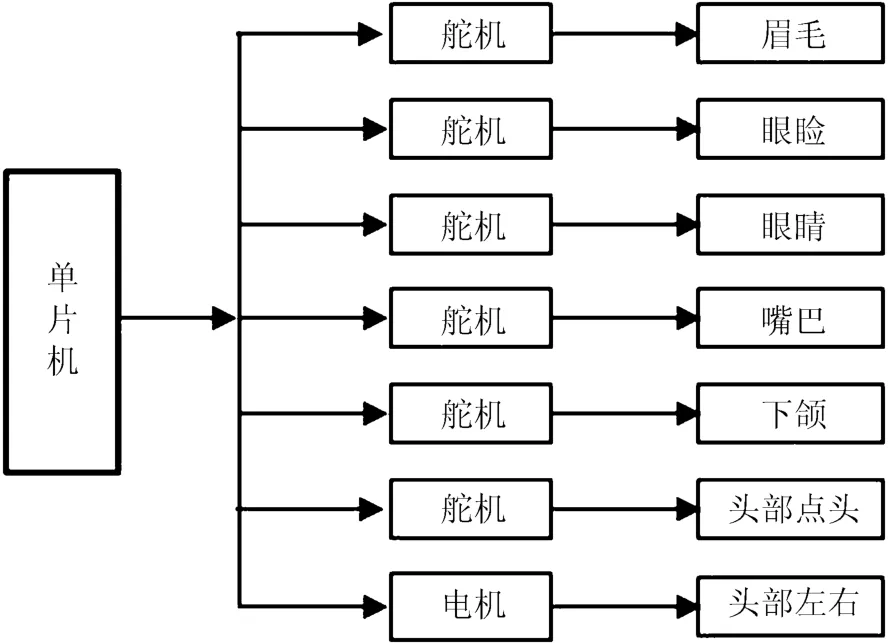
图6 头部控制系统总体框图
3.1 控制系统方案
文章选择51系列的80C51单片机来实现整个系统的控制,其控制方法如图7所示。采用单片机的P1.0~P1.5分别控制6个舵机,分别实现眉毛连接件的向上(电机正转)、向下运动(电机反转),眼睑的开合,眼睛的左右转动、上下转动,下巴的开合,低头、抬头,如图7(a)所示;采用专用的驱动芯片L298控制直流电机驱动头部做左右转动,如图7(b)所示;采用单片机的P2.0~P2.6分别控制7个电机的启动与停止,如图7(c)所示。采用单片机的P0.0~P0.6分别显示7个电机的运行状态及系统的上电状态,如图7(d)所示。
3.2 软件系统设计
表情机器人的软件系统程序基于Keil C51软件开发系统,主程序框图如图8所示,主要包括以下几个模块:系统程序模块,命令输入模块以及系统运行模块三个部分。
其中,系统程序模块主要完成I/O口及参数的设置,程序初始化及按键防抖动延时等功能。命令输入模块主要完成不同表情动作的按键控制。系统在单片机复位开始运行后,根据6个不同按键完成不同的动作,其中各按键对应的机器人表情动作定义如下:k1:摇头动作;k2:点头动作;k3:张嘴动作;k4:眼球上下动作;k5:左眼左右动作;k6:右眼左右动作。系统运行模块主要完成舵机,步进电机等的程序控制。
4 结语
文章对仿人表情机器人头部系统进行了设计,包括眼眉结构、眼球结构、眼睑结构以及嘴部结构的设计,分别实现眨眼、闭眼、扬眉、眼球的左右、俯仰转动、嘴巴的开合以及整个头部的转动和点头等运动,表达高兴、愤怒、讨厌、悲哀及惊讶等表情,尤其改进了现有的眼部机构,实现了机器人的双眼及眼睑的相互独立运动。基于51单片机进行了头部的控制系统和软件系统设计,可以使头部器官快速、准确地到达指定的位置,达到了简单实用、成本低廉的目的,为设计仿人表情机器人提供了一定的理论基础。
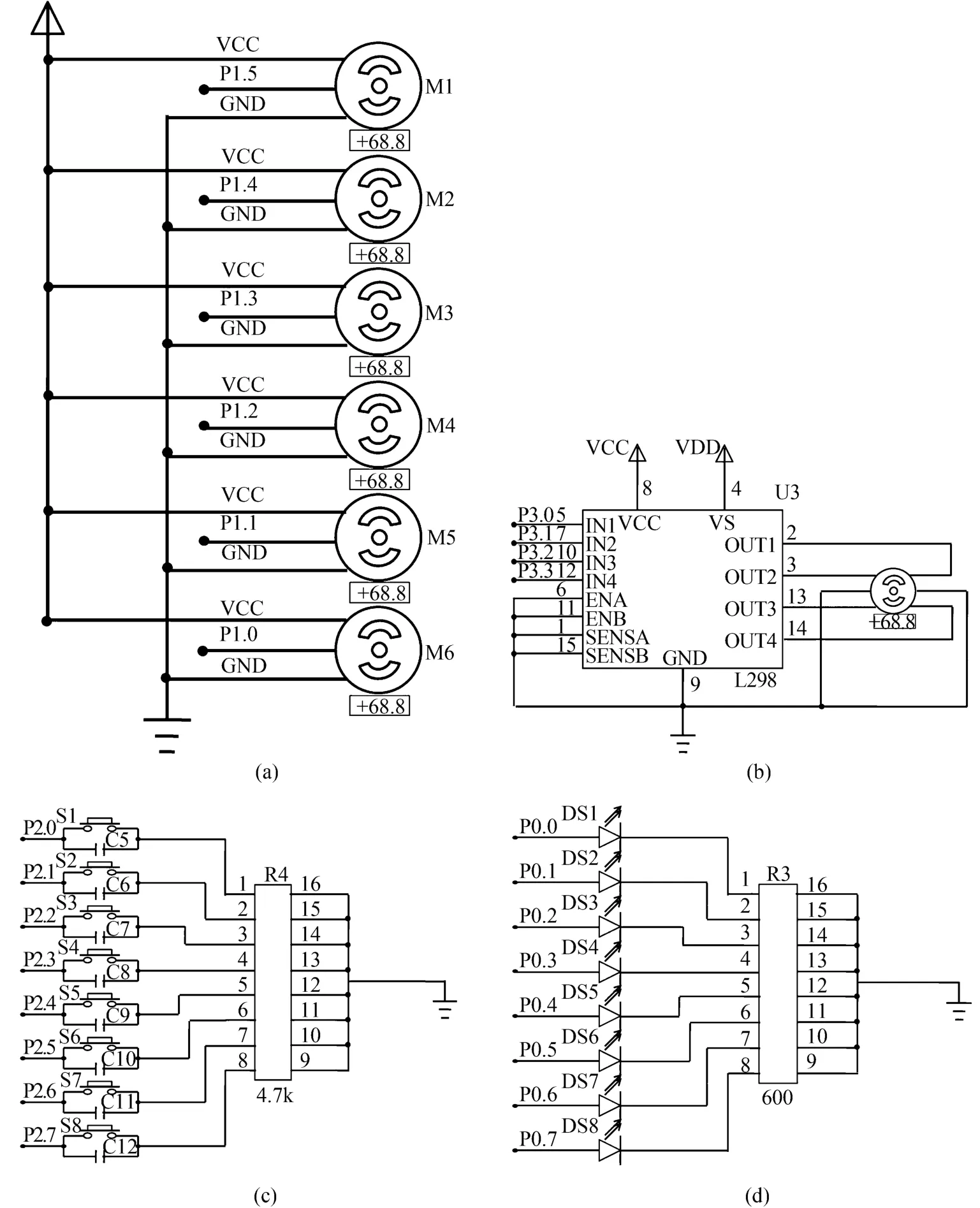
图7 头部系统控制方案图

图8 主程序流程图
[1] 谭林,鲁守银,张伟,等.机器人化护理床及其控制系统[J].山东建筑大学学报,2010,25(1):19-20+30.
[2] 王洪玲,刘存根.基于模糊控制器的按摩机器人的力度控制[J].山东建筑大学学报,2010,25(6):586-590.
[3] Bartne C.,Okada M..Robotic User Interfaces[C].Proceedings of the Human and Computer Conference,London:National Academa press,2010.
[4] 大卫·汉森.美国科学家研制出新型机器人会28中表情[J].科学眼,2003(2):8.
[5] Miwa H.,Umetsu T.,Takanishi A.,etal.Human-like thathas01 factory sensation and facial color expession[C].Proceedings of the 2001 IEEE International Conference on Robotics&Automation Seoul:National Pubushing House,2001.
[6] Miwa H.,Okuchi T.,Takanishi A.,et al.Development of New Human-like Head Robot WE-4[C].Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots&Systems EPFL,Lausanns:Fortress investment Group,2002.
[7] 鹿麟,吴伟国,孟庆梅.具有视觉及面部表情的仿人头像机器人系统设计与研制[J].机械设计,2007,24(7):20-24.
[8] 吴伟国,宋策,孟庆梅.仿人头像机器人“H&F robot-Ⅲ”语音及口形系统研制与实验[J].机械设计,2008,25(1):15-19.
[9] 柏垠,柯显信,唐文彬.基于舵机驱动的一种仿人面部表情机器人的结构设计[J].机电一体化.2009(9):55-58.
[10]柯显信,陈玉亮,唐文彬,等.仿人面部表情机器人连续表情运动控制系统设计[J].微电机,2011(6):35-39.
[11]唐文彬,柯显信,柏垠,等.仿人面部表情机器人的控制系统设计[J].机械设计,2010,27(10):54-57.
[12]柯显信,唐文彬,陈玉亮,等.仿人面部表情机器人SHFR-1样机[J].上海大学学报(自然科学版),2011,17(1):79-84.
[13]柯显信,尚宇峰,卢孔笔.仿人情感交互表情机器人研究现状及关键技术分析[J].智能系统学报,2013,8(6):482-488.
[14]赵岩青,蒋刚.面部表情机器人眉毛结构设计与优化.西南科技大学学报,2012,27(3):84-86.
[15]岳翠萍,梅涛,咯敏舟.表情机器人研究现状[J].机器人技术与应用,2009(1):38-40.
(责任编辑:李雪蕾)
Design of head system of emotional humanoid robot
Xu Xiangrong1,2,Song Xianchun1,2,Lin Yibiao1,2
(1.School of Mechanical and Electronic Engineering,Shandong Jianzhu University,Jinan 250101,China;2.Key Laboratory of Mechanical Engineering&Innovation Technology in Universities of Shandong,Jinan 250101,China)
With the continuous development of the artificial intelligence technology,intelligent service robot,which has human-computer interaction function,has become an important development direction in the field of robotics research,and humanoid robot with facial expression recognition and representation has become the focus of researches.In the paper,emotional characteristics and its definition have been analyzed,themechanism,control system and software system of the head system of the robotwith the function of expression reproduction have been designed on the basis ofmachinery design,sensor technology,actuator control and artificial intelligence technology.Through the design and control of the head system,the robot's head organ and expression control points can accurately and quicklymove to designated position,so a variety of emotional expression can be completed.
humanoid;emotional robot;head system;actuator;control system
TP242.6
A
1673-7644(2014)06-0564-05
2014-06-09
许向荣(1978-),女,副教授,博士,主要从事机电精密测控及机器人设计等方面的研究.E-mail:xt7875@163.com.
猜你喜欢
科学大众(2021年9期)2021-12-31 23:38:09
自动化学报(2019年6期)2019-07-23 01:18:36
传感器与微系统(2018年7期)2018-08-29 00:44:24
电子制作(2018年1期)2018-04-04 01:48:14
作文大王·低年级(2017年9期)2017-09-18 02:00:31
小学生作文(低年级适用)(2017年5期)2017-07-07 10:15:09
制造业自动化(2017年2期)2017-03-20 14:26:08
红领巾·萌芽(2017年1期)2017-02-06 15:42:24
现代制造技术与装备(2016年12期)2016-04-06 03:35:38
智能系统学报(2015年4期)2015-12-27 09:38:10