
面向三维建模的车载移动影像采集系统设计与实现
2014-07-02 00:21刘全海王重天
测绘通报 2014年12期
刘全海,王重天
(1.武汉大学测绘学院,湖北 武汉 430079;2.常州市测绘院,江苏 常州 213003;3.常州市地理信息智能技术中心,江苏 常州 213003)
面向三维建模的车载移动影像采集系统设计与实现
刘全海1,2,3,王重天2,3
(1.武汉大学测绘学院,湖北 武汉 430079;2.常州市测绘院,江苏 常州 213003;3.常州市地理信息智能技术中心,江苏 常州 213003)
由于城市道路及景观三维建模的纹理获取工作面广量大且具有一定危险性,设计了一种简易的车载移动街景影像采集系统,在加快道路及两侧建筑特等景观的高质量纹理获取的同时,可以获取影像的空间位置;而高精度的地面高程可用于修正三维地形起伏,对快速、精细的城市三维建模有着重要的推动作用。试验证明,按照本文方法设计并实现的街景影像采集系统投入少、效果好,推广实效性强。
三维建模;街景影像;移动采集;同步
一、引 言
随着计算机图形学、虚拟现实技术的迅猛发展,三维数字城市已经开展大规模建设和应用。建模层次、模型标准、几何及纹理等方面已有大量的研究[1-3],武汉、重庆、常州等城市为代表的城市级三维模型制作和应用探索,也推动着三维城市向深层次发展。随着三维数字城市的深入,城市规划、建设和管理行业对三维城市提出了新的更高的要求。在城市规划、公安、城管等领域要求三维场景达到真实、优美和动感的效果,能给用户带来强烈的、逼真的视觉冲击,甚至于要求逐步达到一些游戏软件中的动画特效,过去体块式框架模型(LOD1)、带有纹理的标准三维模型(LOD2)已不能满足要求,三维模型必须达到LOD3、LOD4级,使得三维制作时模型更加精细、建筑纹理更加真实逼真、道路场景更加准确全面。如何快速实现优美、精细的城市三维建模,已经成为三维制作者思考和必须解决的重要课题。
三维城市审批模型建设是一项庞大的系统工程,其耗费大、耗时长[3],需要对城市街区包含的大量建筑、道路及城市景观、城市部件进行三维全面建模,同时建立多分辨率纹理表达的细节层次模型[4]。三维建模纹理采集主要有实地摄影、航空航天遥感、激光扫描、航空倾斜摄影及移动测量系统[5-7]等方法。以可量测的实景影像表达三维街景的移动道路测量系统在数字城市建设中有广泛的应用,但它不能在三维实景影像中插入、编辑和全方位浏览规划三维方案模型,难以建立满足城市规划需要的三维城市模型。
目前主流的精细建模主流方式[2]是以CAD的矢量数据为基础,使用3ds Max、Multigen Creator等建模工具,人工构建建筑物的几何模型,通过航测获取顶面纹理,通过地面拍摄侧面影像,利用Photoshop等图像处理工具对采集得到的纹理数据进行编辑处理,得到合适的纹理并进行贴图。在实际作业中,外业照摄时受车辆、树木等遮挡,难以达到理想的拍摄位置和高度,导致纹理贴图融合处理的工作量增大,且精细的道路地形起伏也要求高精度的路面高程信息。因此设计并实现一套能兼顾拍摄速度及图像,同时能获取高程的车载移动影像采集系统显得尤其必要。
二、系统构成与原理
1.系统整体架构
面向三维建模的车载移动高质量影像采集系统主要考虑以下方面:一是精确获取包括地面高程在内的移动车辆运动轨迹,以此为基准实现地面三维建模的地形起伏变化,满足地下管线三维可视化及三维数字城管部件对地形真实性表达的要求;二是在理想的位置获取高质量的街景纹理,满足城市道路及景观三维建模时对高质量纹理的需要;三是获取的纹理与空间相关联,便于图片的搜索、集成和发布应用;四是成本因素,满足需求的同时尽可能降低投入。基于此,本文设计并实现了一种轻量级的车载移动高质量影像采集系统,满足了三维建模对纹理分辨率及精确的地面高程双重需要,系统结构图如1所示。

图1 系统结构图
2.基本原理
整个系统由以下几个模块组成:一是车载移动动态定位系统,由一台基于北斗增强的三星CORS系统的网络RTK移动终端组成。采用无线网络通信技术获取差分RTK改正信息,并实时获取动态定位信息。二是采用高质量街景及全景影像采集单元,主要由4台单反相机和1台全景相机组成。通过4台单反相机获取前、后、左、右4个不同方向的影像纹理,提高影像的获取效率,对判读城市道路景观及纹理获取非常有帮助。1台全景相机获取移动位置的全景影像。系统采用的全景相机LadyBug5图像分辨率3000万像素以上,其主要参数见表1。三是同步控制器单元,通过内触发和外触发两种方式对GPS RTK、单反相机和全景相机进行同步[8]。四是数据传输系统,对采集的RTK和影像、全景数据进行及时传输、存储。五是数据后处理系统,实现对分辨率影像空间位置匹配、处理、集成和建库。通过对系统几何结构参数的精确测定,并通过相对坐标位置的运动方位计算,对每台相机在拍摄时的空间位置和方位进行空间匹配,在此基础上建立街景影像库实现快速调图及利用。

表1 LadyBug5主要参数
三、关键技术与实现
1.基于北斗增强的三星CORS的移动定位
车载移动影像采集系统可以在移动状态下获取目标的精确空间位置。在城市密集区,建筑物及树木的遮挡对GPS信号产生干扰,一般通过GPS结合INS惯性定位定姿,但INS设备较昂贵,实用性不强。
我国自行研制的北斗卫星导航系统可在全球范围内全天候、全天时为各类用户提供高精度、高可靠的定位、导航、授时服务,并兼具短报文通信能力,且北斗星座的分布在中国区域更加合理,可视卫星多,卫星高度角大。基于北斗增强的三星CORS系统由于可观测卫星的增多,在初始化时间、解算时间方面显著增强,其联合定位精度和稳定性要比单一系统优越[9];经测试,在城市建筑密集区,以及绿化茂盛的道路上其空间可用性有30%的提高。精细区域似大地水准面与GPS的有效结合,进一步提高了移动对象的高程精度。
移动车辆的地面轨迹高程为

式中,HGPS为实时的GPS天线相位中心的大地高;Ha为天线相位中心与地面的距离(含天线高及车辆高度,可精确测定);ξ为高程异常值,可从似大地水准面精化成果中获得;Δi为车辆运动时避震及轮胎变形值。
轮胎变形与胎压、车速、载重相关,根据测试,其值根据车速发生变化,一般在1~3 cm之内。
2.GPS、单反相机和全景相机的同步控制
本文采用以单片机为核心控制多台相机同步曝光的触发方式,如图2所示。通过安装在车轮上的霍尔传感器感知车轮转动,车轮每转一圈,霍尔器件便检测到一次磁信号,通过脉冲产生电路发出中断脉冲,单片机响应此信号,对脉冲信号计数,通过相应换算,得到行驶的里程、车速等信息,来触发单反相机和360°全景相机,车轮转动检测装置如图3所示。
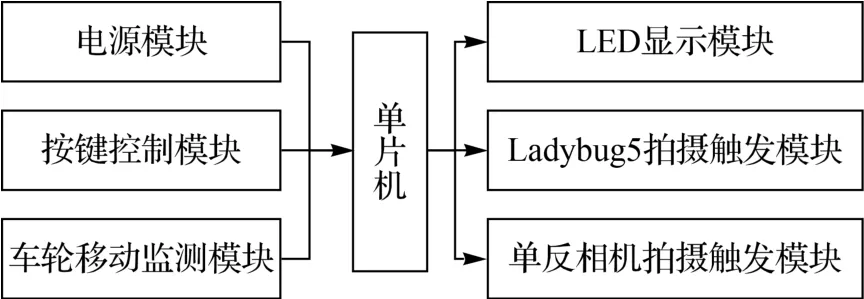
图2 同步控制器
同步控制器包括内、外两种触发方式。内触发方式是通过控制器在内时钟的驱动,按设定的周期和脉冲宽度产生连续脉冲,放大后作为触发信号控制4台单反相机和1台全景相机进行同步拍摄,实现时间控制;外触发方式是使用车辆的车轮转动监测装置获得的脉冲信号作为外部激励脉冲,通过编程来控制距离,并在外部激励脉冲的驱动下实现同步控制,实现距离控制。

图3 车轮转动检测装置
为了便于统一调用和位置一致,单反相机和全景相机的曝光时间须同步。由于高像素、大内存的单反相机(如Canan,Nikon)只能进行单台控制拍摄,4台相机的同步控制需要设计同步控制器来协同相机的同步摄影及实时传输。系统使用单片机对连接至同一系统控制器上的单反相机进行快门同步。影像数据通过USB接口数据线实时下载至计算机中。
3.高分辨率的街景和全景影像的空间位置匹配
时间匹配是车载移动影像采集系统的重要方面。通过GPS时钟和相机等传感器的数据在起始时的时间保持一致,或获取GPS时钟与传感器的时间差,以便通过时间关联来进行影像数据的定位。
通过时间匹配可以将由GPS和单反相机获取的时间和空间进行进行联合处理。由同步控制器控制的单反相机的同步的采集时间,通过时间内插或外推的方式确定每一张街景影像在绝对空间坐标系中的位置信息。算法基本步骤如下:
1)设获取图像Mi的采集时间戳,该图像采集时刻前最后一个GPS位置数据信息为P1(x,y,z),采集时刻后第一个GPS位置数据信息为P2(x,y,z),如P1对应的时间戳,P2对应的时间戳,则图像Mi的采集时刻的GPS位置计算如下

同理,设获取这张图像Mi的采集时刻的前进方向,公式如下

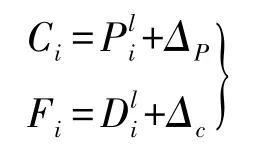
2)在获取Mi的采集时刻的空间位置Pli和前进方向后,根据精确测定的系统几何结构参数,如每台相机 C1、C2、C3、C4相对于 Mi的位移 ΔP (Δx,Δy,Δz),以及相机镜头与移动车辆前进方向的夹角Δc,根据大地坐标系统与测量坐标系之间的换算公式,有
集成高清晰度的单反相机和全影像机即能构建基于三星的移动测量系统,实现城市道路的移动路线的精确高程获取,以及高分辨率的城市街景纹理获取。
4.后处理软件
后处理软件主要实现各类数据下载、坐标转换、空间位置匹配及数据处理、数据入库等功能,如图4所示。利用GPS RTK坐标处理软件提供RTK数据的下载、WGS-84坐标与地方坐标的转化等功能。街景影像GPS数据与照片处理软件实现照片拍摄的时间信息处理,根据照片拍摄的时间与GPS RTK坐标采集的时间进行RTK实测坐标与照片相位中心的位置坐标内插匹配、街景影像数据的建库,以及数据库的管理等功能,如图5所示。街景影像数据库包街景前视照片表、街景侧视照片表及街景照片的相位中坐标表,存储了照片的时间信息与相位中心的坐标信息。

图4 导入界面
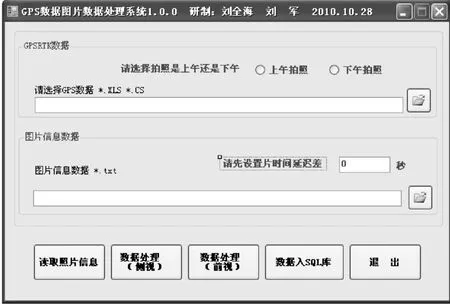
图5 坐标内插匹配计算
5.街景影像的数据组织和应用管理
由于各分辨率的街景影像数据量大,对影像数据按道路、时间或空间位置进行管理时,系统采用了SQL Server数据库,采用 VB.NET语言,在 Auto-CAD2004环境下开发了街景影像应用工具条(如图6所示),实现AutoCAD环境下影像数据快速调用(如图7所示),并在三维数字城管系统中集成应用(如图8所示)。
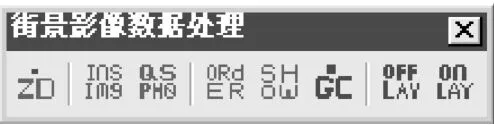
图6 CAD下开发的专用工具条

图7 AutoCAD街景影像调用

图8 三维数字城管系统中的集成
四、试验与分析
按照上述方法,本文设计并实现了面向三维建模的车载移动影像采集系统。为验证系统的精度和可靠性,本文选取了5个典型的试验区进行精度及可靠性检验。试验区1为建城密集区的平面道路;试验区2为一般建城区的平面道路;试验区3为常州市高架路南环线,高架路上基本无遮挡,桥面高于地面约15 m;试验区4为常州市高架路上复杂立交线,形式复杂;试验区5为城市立交地道处。
1.精度测试
精度测试结果见表2,可以看出,采用本文方法的高程精度达到甚至超过LOD4细节层次模型高程精度(≥0.2 m)的要求。
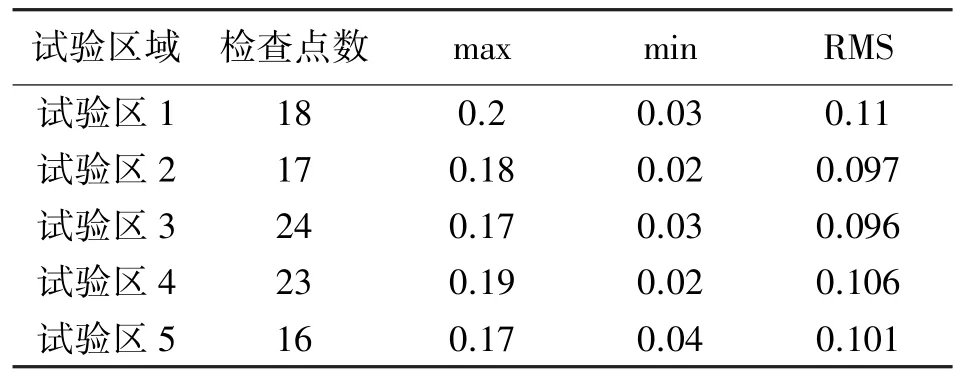
表2 试验区高程精度测试
2.采集效率对比
目前,每个学校的每个学科都在培养学生的个性化,其中也包含体育课程。在以往的传统教学中,老师只是一味地让学生们跟着教学进度进行运动,而且过分强调运动时间、运动项目,学生在体育课不能进行感兴趣的运动。现代教学论视角下体育教育信息有利于培养学生的个性化。每个学生个体存在差异性,个人的体能是不一样的。对于体弱的学生不能进行强化运动,对于身体素质较好的学生过于轻松地训练不利于身体强健。学生在体育教育的发展中要形成不同的爱好和兴趣,找到能体现自我的运动。
本文方法采取移动测量车按两相机同步拍摄,可达6000张/h(拍摄频率5 m/张,车速30 km/h),一般拍摄时间为3~4 h每天,也可饱和拍摄5~6 h每天。由表3可以看出,本文方法是传统方式的效率的30倍。

表3 采集效率统计对比
本文采用的单反相机分辨率≥1800万,采用的Ldaybug5的图像分辨率≥3000万像素,比Ladybug3提高60%以上,为建立精细城市三维提供了高质量的纹理数据。同时街景影像与GPS位置信息的匹配和关联便于街景影像调用、图片方位判别,极大地方便了三维建模。
五、结束语
根据本文方法设计与实现的车载移动影像采集系统投资少、便于维护,采集的街景影像分辨率高,可同步获取行车路线的精确高程,为三维建模时的地形起伏匹配与改正提供了准确的地形高程。后处理软件不仅方便三维建模工作者快速调用,而且可在三维城管系统及城市应急信息系统适中集成应用,并可以在城市街景地图系统中发布应用。不足之处在于尚未考虑街景影像的三维像对,缺乏车载LiDAR的集成,将在后续高质量影像采集系统中作进一步研究。
[1] 中华人民共和国住房和城乡建设部.CJJ/T157—2010城市三维建模技术规范[S].北京:中国建筑工业出版社,2010.
[2] 高山.陈思.城市三维建模技术与标准研究[J].测绘通报,2013(3):95-97.
[3] 赵中元,高山.三维数字城市建模精度与制作标准研究[J].数字城市,2010(8):17-19.
[4] 杨必胜,李清泉,史文中.三维GIS中多分辨率纹理模型的研究 [J].中国图象图形学报:A辑,2003,8(3):328-333.
[5] 李德仁.基于可量测实景影像的空间信息服务[J].武汉大学学报:信息科学版,2007,32(5):377-380.
[6] 李德仁.从数字地图到空间信息网格—空间信息多级网格理论思考[J].武汉大学学报:信息科学版,2003, 28(6):642-650.
[7] 李德仁.移动测量技术及其应用[J].地理空间信息,2006,4(4):1-5.
[8] 高文武,贺赛先.基于GPS的CCD相机同步控制器[J].武汉大学学报:信息科学版,2004,29(8):743-746.
[9] 王世进,秘金钟,谷守周,等.BDS/GPS组合相对定位方法及精度分析[J].测绘通报,2014(5):1-4.
[10] 全威,郝桂菊.用3ds Max建立城市房屋3维模型的方法[J].测绘与空间地理信息,2011,34(6):194-195,200.
The Design and Implementation of the 3D-modeling-oriented Vehicle-mounted Mobile Image Acquisition System
LIU Quanhai,WANG Chongtian
P237
B
0494-0911(2014)12-0012-04
刘全海,王重天.面向三维建模的车载移动影像采集系统设计与实现[J].测绘通报,2014(12):12-15.
10.13474/j.cnki.11-2246. 2014.0386
2014-06-30
住建部科学技术项目计划(2013-S5-4)
刘全海(1972—),男,甘肃舟曲人,博士生,主要研究方向为三维数字城市建设理论。
猜你喜欢
学生天地(2020年1期)2020-08-25
软件(2020年3期)2020-04-20
小学生(看图说画)(2019年12期)2019-12-21
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
幼儿智力世界(2017年5期)2017-07-12
儿童故事画报(2016年5期)2017-02-07
Coco薇(2015年5期)2016-03-29
海外英语(2013年9期)2013-12-11
数码摄影(2009年12期)2009-12-07
