
基于分级波束形成的三维声纳系统设计*
2014-07-01 23:29:06林贤洲陈耀武
传感器与微系统 2014年8期
林贤洲, 陈耀武
(浙江大学 数字技术及仪器研究所,浙江 杭州 310027)
基于分级波束形成的三维声纳系统设计*
林贤洲, 陈耀武
(浙江大学 数字技术及仪器研究所,浙江 杭州 310027)
针对三维声纳波束形成海量运算造成硬件系统复杂难以实现的问题,设计了基于分级波束形成的三维声纳系统。系统基于大规模(48×48)换能器接收基阵,采用分布式现场可编程门阵列(FPGA)结构实现两级波束形成,所需计算量相比传统波束形成减少九成。该算法经Matlab仿真验证了其合理性,系统样机经水下试验证明:在水平50°垂直50°覆盖角的观测范围内,实现角度分辨率达到0.39°,距离分辨率达到2 cm的三维成像。
三维声纳; 换能器; 分级波束形成; 海量运算; 现场可编程门阵列
0 引 言
传统声纳系统声纳基阵多采用一维线阵[1],对探测目标在距离和方位上作二维定位,如美国RESON公司开发的数字声纳SeaBat8128[2]。随着现代军事应用和海洋开发的发展,需要借助三维声纳对物体在水平、垂直、距离3个方向上都获得目标探测分辨力,分辨物体细节[3],用于水下航行器导航、海底资源开发和自动绘制海底地貌等。
三维实时成像声纳系统实现的技术难度较大,波束形成的运算量随着换能器基阵规模呈几何增长[3]。哈尔滨工程大学应用于水下机器人的声纳方案[1],换能器基阵阵元数为128(16×8),工作频率为300kHz,采用DSP实现波束形成,每秒需655,360次乘法运算。Coda Octopus公司的Echoscope Mark Ⅱ型[4]声纳系统,具备对重要设施进行监控警戒和对蛙人等动态目标进行识别报警等功能[5],换能器基阵规模达到2 304(48×48),传统波束形成算法需要完成每秒302,173,696次乘法运算。本系统采用分级波束形成方法,将大阵进行多子阵划分[6],并采用了经过优化的模拟退火算法[7],对各个基元分配权重系数,在可接受的最大旁瓣的情况下对基阵稀疏化[8,9],分级运算每秒只需23,309,824次乘法运算。
系统换能器接收基阵规模为2304(48×48),接收换能器材料采用PZT—5压电陶瓷,压电常数d33>450 pC/N,其敏感的压电效应将接收声波产生的机械振动转换为微弱的电压信号,良好的脉冲响应特性为获取高分辨率的声纳图像打下基础。现场可编程门阵列(FPGA)内部集成大量的数字信号处理单元(DSP Slice),具有多级流水处理、数据位宽可配置性、丰富IO接口等特点,系统采用分布式FPGA结构实现模拟前端的同步采样控制和波束形成运算。
1 系统原理和结构
二维平面阵的结构如图1所示。设定换能器基阵阵元位于xoy平面上,沿x轴和y轴方向每条线阵阵元的个数分别为M和N,相邻阵元间距均为d。A表示空间中的信号源,OB和OD分别为OA在xoz平面和yoz平面的投影。
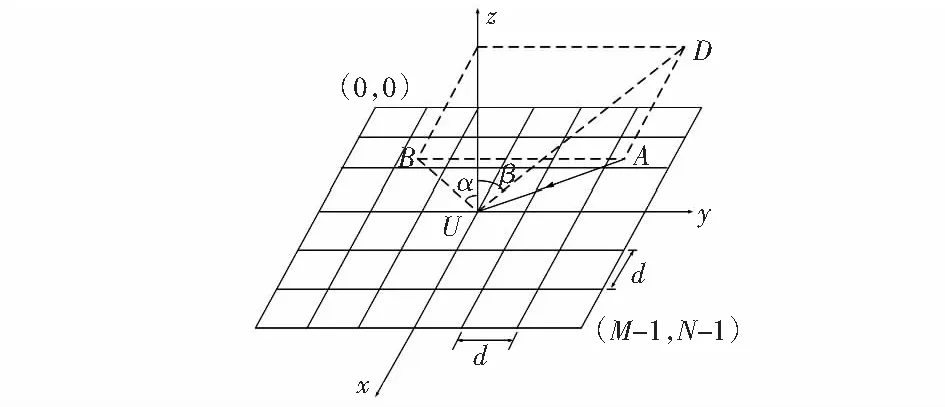
图1 二维平面阵示意图Fig 1 Diagram of 2D planar array
传统波束形成算法对x轴方向角度范围为α=αp(p=0,1,…,P-1),和y轴方向角度范围为β=βq(q=0,1,…,Q-1)独立做频域波束形成,得到P×Q个波束结果[10]为
(1)

如图2所示,48×48的大规模换能器面阵划分为2级,均匀划分为6×6的一级子阵和8×8的二级子阵。在开角50°×50°观测范围内,6×6的一级子阵频域波束形成,得到16×16个波束,称为一级波束形成;在8×8的二级子阵中对一级子阵的16×16×8×8个波束做频域波束形成,得到最终128×128个波束,称为二级波束形成。

图2 二维平面子阵划分Fig 2 Division of 2D planar subarray
三维声纳系统如图3所示,包含12块子信号处理板和1块主控制板,每块子信号处理板负责处理48×4个(4条线阵)数据信号通道,系统工作频率为300 kHz。
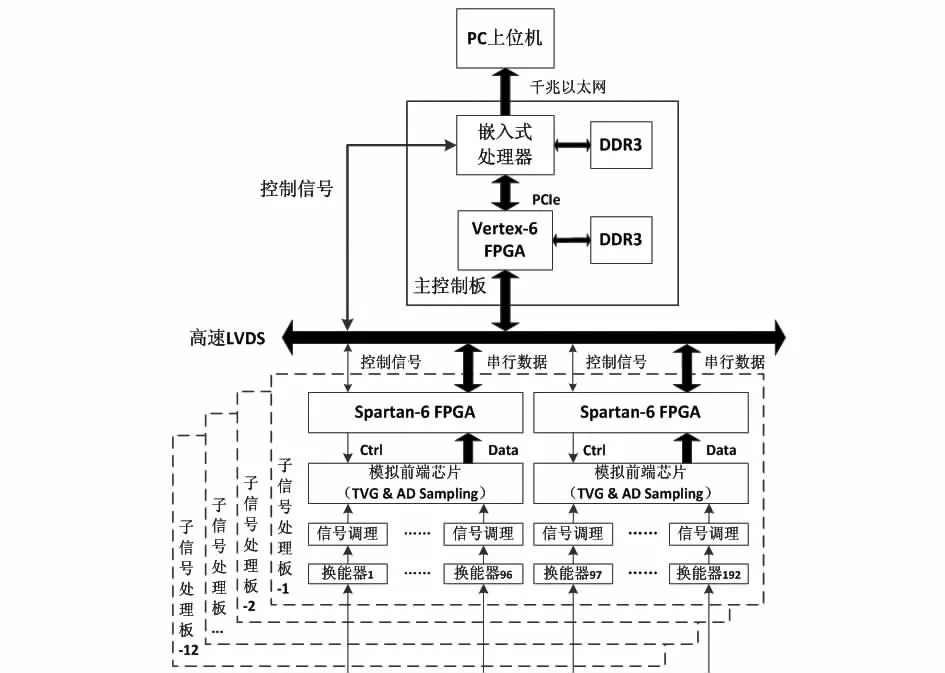
图3 水下三维声纳成像系统结构框图Fig 3 Structure block diagram of 3D underwater sonar imaging system
调理电路包括一阶的低通滤波电路和二阶的带通滤波电路,总体通带为270~330 kHz,600 kHz以上频带衰减20 dB以上。2片Xilinx公司的Spartan—6系列的FPGA实时控制模拟前端芯片时间增益(time versus gain, TVG)调节功能和实现多通道的信号同步A/D采样,对采集到的数据做离散傅里叶变换(discrete Fourier transform,DFT),完成一级子阵波束形成,结果通过高速LVDS连接器上传到主控制板。
主控制板的Vertex—6 FPGA完成二级子阵波束形成,结果通过PCIe高速总线发送给控制板的嵌入式处理器。嵌入式处理器将数据按帧打包后,将结果经千兆以太网上传至PC上位机。同时,主控制板通过传输线给出控制信号(TVG参数等)到各子信号处理板。
PC端实现三维图像的实时显示与数据的备份保存,在一帧数据内将相邻点连接为三角面片段,使独立各点形成拓扑结构[11],帧间数据通过图像拼接融合为更加完整的图像,采用合理的配色方案和帧率控制实现图像的三维建模。
2 FPGA分级波束形成
FPGA分级波束形成主要包含DFT、一级波束形成和二级波束形成,具体工作流程如图4所示。

图4 FPGA工作流程Fig 4 Work process of FPGA
子信号处理板FPGA同步采样通道信号,以乒乓缓存的方式暂存在双口RAM中,DFT处理模块依次从RAM中读取72个采样点做DFT运算,取300 kHz对应谱线,进行6×6规模的一级波束形成。
主控制板FPGA通过DDR3读写控制模块将接收的一级波束数据暂存入256 Mbit大小的DDR3中,依次读取所需数据完成8×8规模的二级波束形成得到128×128个数据结果。
2.1 DFT
DFT如式(2)所示

(2)
其中,x(n)为各阵元接收信号的采样点,X(k)为频域离散谱线。
对每个阵元进行72个采样点DFT运算后,得到48×48条对应300kHz的谱线Xmn(8)。由式(2)可知,计算48×48条谱线需要48×48×72×4×9=5 971 968次乘法运算,即每块子信号处理板需要完成4×48×72×4×9=497 664次乘法运算。
2.2 一级波束形成


(3)
y方向波束形成与x方向相同。通过相邻线阵的FPGA交互中间数据,最终第p行线阵在βq方向形成的波束Bpq,表示6×6面阵在(αp,βq)方向形成的波束,取绝对值后得到波束强度|Bpq|

(4)
2.3 二级波束形成
主控制板在做二级子阵波束形成时,将一级6×6的子阵作为一个阵元,即规模为8×8大小的二级子阵,相邻2个阵元之间的间距为6 d,每个阵元包含空间16×16个方向上的波束能量信息。与一级子阵波束形成类似,二级子阵波束形成最终空间128×128个方向的波束信息。


图方向上最近的波束Fig 5 The nearest beam in direction of


y方向波束形成与x方向相同,在 平面-25°~25°范围内均匀划分成128个方向,最终128×128波束结果可用矩阵表示

3 测试结果
在单目标成像仿真实验中,假设探测目标为静止目标且满足远场条件,不考虑多普勒频移且回波信号为单频信号。模拟空间单目标反射波束角度为(α,β)=(13°,-5°),Matlab仿真得到空间波束结果如图6所示。

图6 单目标仿真结果Fig 6 Single target simulation result
仿真结果验证了分级波束形成算法的正确性和可行性,确认了此方法对空间静止目标具有良好的方向指向性。
水下实验测试系统在实际环境下工作的成像效果。在水池中预置如图7(a)边长约为2 m的立方体方框,位于系统样机装置探测范围内且相距约10 m的位置上,成像声纳对目标进行探测。图7(b)为图7(a)中方框的探测成像效果显示,目标方框的轮廓清晰可见,声纳系统具有良好的成像效果。

图7 水箱测试结果Fig 7 Tank test result
图8为样机在浙江省千岛湖水试时的视频截图,测试船往湖里投放饵料,吸引鱼群靠近进食,可以看到呈星状分布的鱼群,系统样机具备良好的动态物体探测能力。
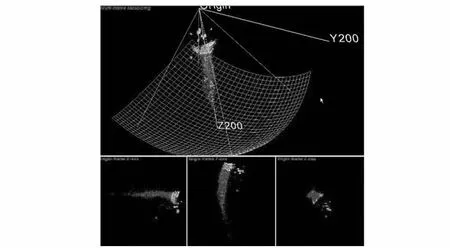
图8 水下场景截图实例Fig 8 Example of underwater scenes shots
将目前国内外关于水下声纳三维成像的工程化应用,如哈尔滨工程大学水声工程学院为水下机器人声视觉系统设计的声纳子系统,英国Coda Octopus公司研制的Echoscope Mark系列三维声纳,与本系统样机技术指标进行对比。如表1所示,本系统样机技术指标达到了国际先进水平,填补了国内空白。

表1 国内外主要三维声纳系统技术指标Tab 1 Technical indexes of domestic and international main 3D sonar system
4 结束语
为获得更大的探测角度和更高的探测精度,设计了具有大规模换能器基阵的三维声纳系统,基于分布式硬件结构,将分级波束形成的运算压力分摊到各FPGA中,计算量相比传统算法减少了90 %。经水试结果表明:该系统具有良好的水下成像效果,具备实时探测水下运动目标的能力,有广泛的工程应用价值。
[1] 桑恩方,张小平,苏龙滨.三维成像声纳的设计与实现 [J].哈尔滨工程大学学报,2003,24(3):241-244.
[2] Yu H,Kim E S.Ultrasonic underwater thruster[C]∥2004 17th IEEE International Conference on Micro-Electro-Mechanical-Systems(MEMS):IEEE,2004:486-489.
[3] 张小平.高分辨率多波束成像声纳关键技术研究 [D].哈尔滨:哈尔滨工程大学,2005.
[4] Davis A,Lugsdin A.High speed underwater inspection for port and harbor security using code echoscope 3D sonar[C]∥Pro IEEE OCEANS MTS,2005:2006-2011.
[5] Zhang Q M,Chen J,Wang H,et al.A new transverse piezoelectric mode 2—2 piezocomposite for underwater transducer applications[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,1995,42(4):774-781.
[6] Johnson J A,Karaman M,Khuri-Yakub B T.Phased subarray processing for underwater 3D acoustic imaging[C]∥MTS/IEEE OCEANS’02,2002:2145-2151.
[7] Kirkpatrick S,Gelatt C D,Vecchi M P.Optimization by simulated annealing [J].Science,1983,220(4598):671-680.
[8] Ling C,Zhu L,Wee S,et al.Linear aperiodic array synthesis using an improved genetic algorithm[J].IEEE Transactions on Antennas and Propagation,2012,60(2):895-902.
[9] 黄龙杨,李梦醒,刘 慧,等.约束条件下线性阵列天线方向图的正交综合[J].华南理工大学学报:自然科学版,2009,37(10):25-29.
[10] 陈 朋,陈耀武.三维声纳频域波束形成算法的优化及实现[J].吉林大学学报,2010,40(3):830-835.
[11] Hoppe H,De Rose T,Duchamp T,et al.Surface reconstruction from unorganized points [J].Computer Graphics,1992,26(2):71-78.
Design of 3D sonar system based on multistage beamforming*
LIN Xian-zhou, CHEN Yao-wu
(Institute of Advanced Digital Technology and Instrument,Zhejiang University,Hangzhou 310027,China)
Aiming at problems that beamforming massive computing of 3D sonar makes complex hardware system which is difficult to realize,design 3D sonar system based on multistage beamforming.Based on large scale of transducer receiving arrays,the system utilizes distributed FPGA structure to achieve two stage beamforming, reduce 90 % of computing amount,compared with traditional beamforming.Rationality of the algorithm is verified by Matlab simulation.Tests underwater demonstrate that,within range of 50°horizontal and vertical coverage angle,3D sonar system is able to form 3D image with angular resolution of 0.39° and distance resolution of 2 cm.
3D sonar; transducer; multistage beamforming; massive computing; field programmable gate arrays(FPGA)
10.13873/J.1000—9787(2014)08—0101—04
2014—01—09
国家“863”计划资助项目 (2006AA092109); 国家自然科学基金面上项目(41276090)
TP 752.1
A
1000—9787(2014)08—0101—04
林贤洲(1988-),男,浙江温州人,硕士研究生,研究方向为嵌入式系统、电子仪器系统。
猜你喜欢
电子技术与软件工程(2022年8期)2022-07-08 03:31:12
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
舰船电子对抗(2019年4期)2019-09-10 02:00:16
水下无人系统学报(2018年5期)2018-11-09 07:40:54
电子测试(2018年14期)2018-09-26 06:04:12
声学与电子工程(2017年1期)2017-06-22 11:30:07
火控雷达技术(2016年2期)2016-02-06 02:29:03
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52
