
基于改进蚁群算法的红外图像边缘检测方法
2014-06-28 16:44王栋尚堃
兵器装备工程学报 2014年7期
王栋,尚堃
(中国空空导弹研究院,河南洛阳471009)
基于改进蚁群算法的红外图像边缘检测方法
王栋,尚堃
(中国空空导弹研究院,河南洛阳471009)
蚁群算法应用在红外图像边缘检测方面具有良好的效果,但个体蚂蚁的参数需要针对不同图像进行手动配置,这种情况既不利于工程化应用,又降低了算法的效率。针对该问题,提出了一种基于改进蚁群算法的图像边缘检测方法,该方法采用估计个体蚂蚁的分布区域来代替以往全局随机分布的方式,提高算法在敏感区域的搜索效率;同时根据图像边缘复杂程度给出个体蚂蚁的移动步长、禁忌列表长度等参数用于算法迭代,促进算法在边缘丰富区域搜索的同时抑制了算法结果早熟。多组仿真结果证明该方法能够自动给出较为合适的参数,同时在不影响边缘检测效果的前提下缩短运行时间。
边缘检测;蚁群;自适应参数
红外图像呈现的是视场内的灰度分布情况,其分辨率一般不如可见光图像。于是红外图像边缘成为了最重要特征之一,包含了目标的重要信息,主要表现为图像局部特征的不连续性,一般定义图像中位于灰度发生急剧变化的区域像素集合为图像的边缘。图像边缘检测[1]通常是一系列图像处理过程的第一个阶段,直接影响后续处理的效果,是近年来研究的热点,引起了国内外学者的广发关注。传统边缘检测方法主要是借助空域微分算子利用卷积来实现,如Sobel算子,Robert算子,Canny算子和拉普拉斯高斯算子等[2];同时还有从图像全局能量最小化出发,将边缘检测问题转化为函数最优求解问题的方法,如:数学形态法,神经网络法,小波变换法等。蚁群算法(Ant Colony Algorithm)作为一种新的智能化优化算法由意大利学者Dorigo于20世纪90年代提出[3],算法模拟自然界蚂蚁交换信息的方式,每只个体蚂蚁都依据一定原则移动并释放信息素,具有并行性好、鲁棒性强、同时结果一直趋向于正反馈等特点,迅速应用在各个领域并成为一种解决优化组合问题的有效方法。近几年,蚁群算法被应用在图像处理方面也取得了良好的效果,但其算法内部运行过程复杂,需要进行改进以适应图像边缘检测的特点。
1 蚁群算法图像边缘检测
1.1 蚁群边缘检测算法原理
蚁群算法是模仿蚂蚁释放信息素寻找最短路径的方法来寻找实际问题的最优解。对于图像边缘检测过程来说,算法将整幅图像视为一张二维节点图。初始阶段首先将一定数量蚂蚁随机放置在节点上,每只蚂蚁会向相邻节点移动并在节点上释放信息素。在迭代过程中,蚂蚁会依据节点转移策略倾向于选择信息素浓度高、梯度值高的节点[4]。由于图像的边缘点梯度值一般较高,并且被多只蚂蚁经过的节点信息素浓度也较高,蚂蚁会向图像边缘节点聚集。最后通过总结全局信息素浓度便可以得到目标边缘,由于是大量个体蚂蚁搜索交互得来,比一般的梯度检测算子具有更强的探索边缘的能力。
1.2 改进算法原理
根据前述的蚁群算法思想,可知在搜索过程中蚂蚁起始位置的设定、目的节点选择策略、信息素保留机制3个环节,分别对应影响个体蚂蚁搜索起点,边缘点选择和最终全局边缘总结3方面进而影响整个算法处理过程,是蚁群算法最关键的步骤。学界也出现了多种改进方式来提高算法处理效率,主要集中在信息素释放机制设置和蚂蚁初始位置设置两方面。自适应信息素释放机制[5]是在不同阶段采取不同的信息素释放策略,前期使用较高浓度释放引导蚂蚁向边缘点汇聚,后期使用较低浓度释放来促进发现新的边缘点。文献[6]中提出了在对蚂蚁初始释放位置的自适应选择,减少了非边缘区域的蚂蚁数。但此方式会导致蚁群算法早熟得到次优解,最终出现边缘提取不连续等问题。
本文利用Sobel算子检测出的边缘区域与来引导蚁群算法中个体蚂蚁的释放,增加在边缘丰富区域搜索的时间,从而提高算法效率。为了避免算法搜索结果的早熟,于是通过调整信息素挥发浓度和个体蚂蚁记忆步长的方法使其不会反复经过已检测出边缘点,以增大对全局边缘的搜索能力,抑制算法结果过快收敛,最终保证了图像边缘检测结果的效果。
1.2.1 初始参数的自适应设置
根据蚁群算法的原理可计算出其时间复杂度为O(I· n2·m),其中I为算法总体迭代次数,n为图像总像素数,m为蚂蚁总数。根据时间复杂度可知应尽量减少全局遍历的次数,使用较多的蚂蚁进行并行运算来提高算法效率。

依据式(1)控制每只蚂蚁行进总步长S在蚂蚁总只数的1.5倍左右。依照式(2)控制个体蚂蚁行进禁忌列表长度在总步数S的0.5倍左右,这样设置使得个体蚂蚁既不会在小范围绕圈,又不会因为禁忌列表过长而出现目标边缘提取不连续现象,同时个体参数波动也使其更接近于真实自然情况。总体迭代次数设置为3来尽量减小全局遍历的次数。
1.2.2 邻域节点选择策略
个体蚂蚁在选择移动目标节点时,主要参考的是邻域节点的残留信息素浓度值和启发信息值,其中启发信息值由节点的梯度幅值来决定。移动过程中,蚂蚁根据式(3)来计算邻域节点到(l,m)节点(l,j)的转移概率并进行随机选择移动

其中:τ与η表示从节点(l,m)到节点(i,j)的信息素浓度和启发信息;α和β表示对其的控制因子;Ω是移动范围,即节点(l,m)的8个邻域节点,同时由于禁忌列表的存在,已经经过的节点是不会被选择的。
1.2.3 全局信息素更新
信息素矩阵记录了图像全节点的信息素浓度值,不仅为个体蚂蚁选择目标节点时提供参考,也是最终绘制整幅边缘图像的依据。信息素矩阵更新分为2种方式,一是在迭代过程中,节点信息素会不断挥发,同时如果蚂蚁经过该节点则会留下新的信息素


式(5)体现了这个过程,其中ψ为弱化因子。
1.3 算法流程
改进蚁群边缘检测算法整体流程如图1所示。
2 实验仿真及结果分析
仿真试验在主频3.4 GHz计算机,WinXP SP3操作系统下的Matlab7.1环境下进行,包含2组仿真结果,第一组仿真验证了Sobel算子引导下蚂蚁放置的有效性,第二组仿真验证了给出的自适应参数具有较高的效率。
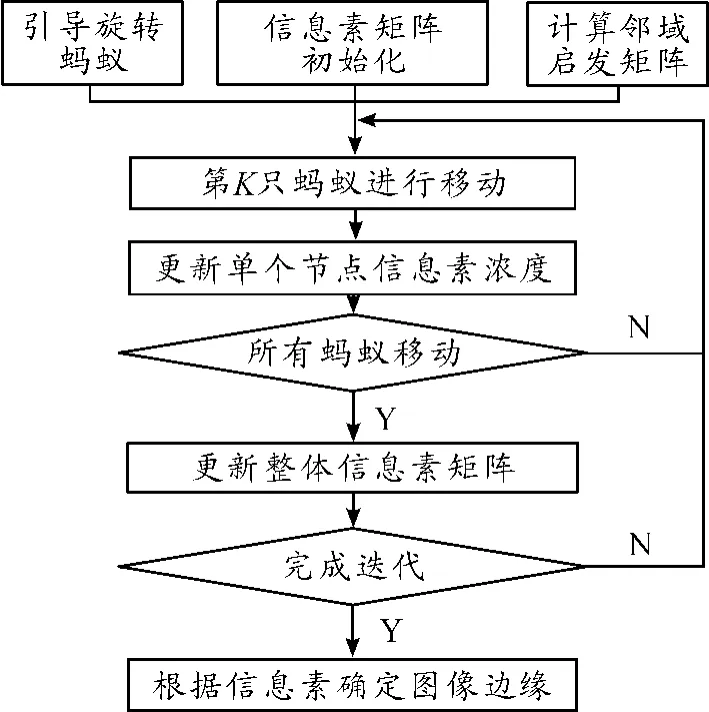
图1 检测算法流程
1)初始位置引导释放的有效性验证试验
图2(b)和图3(b)是经过Sobel边缘检测算子处理得到的结果,可以看出Sobel算子仅能对灰度变化剧烈的边缘区域进行检测,一旦图像中灰度变化较缓慢(如客机的窗户),梯度算子便难以提取边缘,丢失了较多的图像信息。图2 (d)与图3(d)是本文算法的仿真结果,相比于图2和图3显示的原始蚁群算法结果,本文算法检测出了更多处于灰度缓慢变化区域细致的边缘(如客机的机舱和建筑的窗户),保留了更多的图像信息。
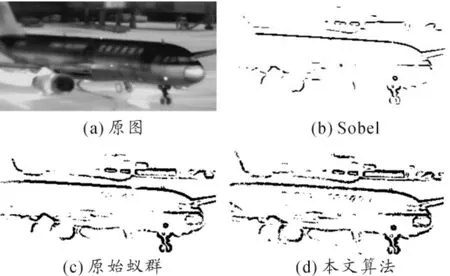
图2 有效性验证试验仿真结果一
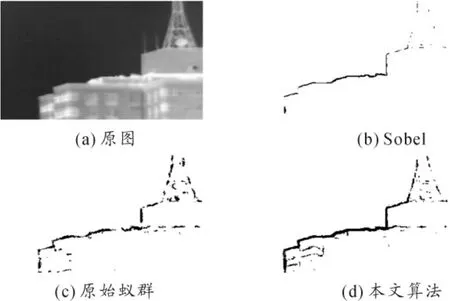
图3 有效性验证试验仿真结果二
2)自适应参数配置的有效性
本组仿真使用尺寸为151×137的飞机红外图像和197 ×222的顶楼铁塔红外图像。
表1是算法给出的自适应参数以及对不同参数进行放大后的算法表现。首先依据原图4(a)的信息给出的参数是蚂蚁只数A=144,总步长S在(144,288)范围波动,禁忌列表长度在(72,144)处波动以及针对图5(a)的信息给出蚂蚁只数A=209,总步长S在(209,418)范围波动,禁忌列表长度在(105,209)处波动。图4(b)和图5(b)是算法自适应设置参数运算后的结果,图4(c)和图4(d);图5(c)和图5(d)是在现有参数基础上增大后的算法结果,通过对比算法效果和运行时间说明自适应参数的合理性。
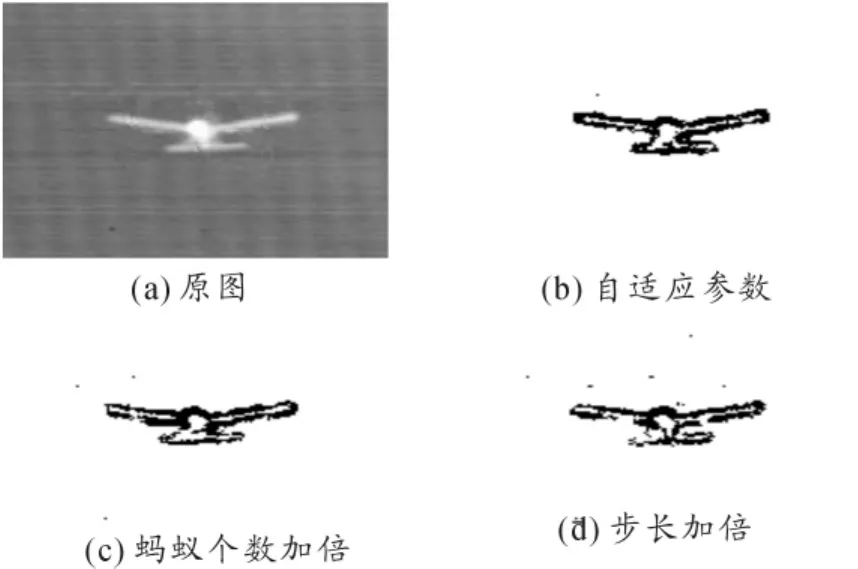
图4 自适应参数配置的有效性仿真结果一
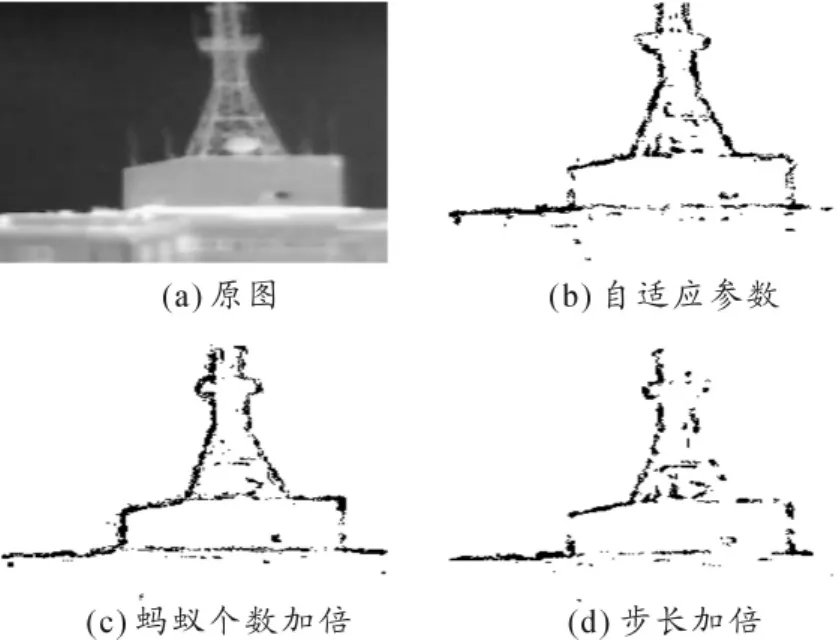
图5 自适应参数配置的有效性仿真结果二

表1 不同参数仿真时间对比
由仿真结果可以看出蚂蚁个数的增加或者个体蚂蚁步长以及禁忌列表的增加对图像边缘检测效果的改善都比较有限,但都不同程度上增加了算法运行的时间。蚂蚁个数的增加导致在边缘密集区域集中的次数较多,在检测结果上呈现为边缘变宽(如图4(c)的机翼部分),这属于一种早熟的情况。而禁忌列表随着总步长加倍使得蚂蚁很难多次往返于边缘点,检测结果呈现出图像边缘提取出现不连续(如图4(d)和图5(d)的边缘),这对检测是有害的,同时大幅增加了算法运行时间,符合时间复杂度的预期。由此可见,算法给出的自适应参数在一定区间内是比较合适的,能在较短时间内保证检测结果。
4 结束语
蚁群算法应用于图像边缘检测具有很大优势,但个体蚂蚁参数需要人工配置难以满足实际情况需要。本文算法使用Sobel算子引导蚂蚁释放在边缘丰富区域,增大对敏感区域的搜索效率,同时自适应的给出蚂蚁在一次迭代中行进的步长和禁忌列表长度,防止蚂蚁在较小范围内反复选择边缘点,增大发现新边缘的概率,抑制算法检测结果过早收敛。仿真结果表明,该算法能够对图像边缘进行有效检测,给出的参数也证明比较合适,在保证检测结果的前提下算法运行时间最短,是一种有效的图像边缘检测方法。
[1]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005,31(3):415-419.
[2]孙军,黎琪,李和睿.基于集合映射的彩色图像边缘检测[J].四川兵工学报,2012,33(10):86-87.
[3]张景虎,边振兴.基于蚁群算法的图像边缘检测研究[J].火力与指挥控制,2010,35(2):116-118.
[4]殷小莉,黄晓彤.蚁群算法在低对比度图像边缘检测中的应用[J].计算机技术与发展,2013,23(5):180-183.
[5]詹晓倩,何坤.基于改进蚁群算法的图像边缘检测[J].四川大学学报,2010,47(6):141-145.
[6]张志协,曹阳.基于改进型蚁群算法的最优路径问题求解[J].计算机系统应用,2012,21(10):76-80.
[7]Yuan Chun-lan,Xiong zong-long.Study of Infrared Image Edge Detection Based on Sobel Operator[j].Laser&Infrared,2009(39):85-87.
[8]Ma Yan,Zhang Zhi-hui.Contrast of Several Edge Detection Operator[J].Inoustry and Mine Automation,2004(2):54-56.
[9]Marco Dorigo,Christian Blum.Ant Colony Optimzation theory:A Survey[J].Theoretical Computer Science,2005,344,Issues 2-3(17):243-278.
[10]Jing Tian,Weiyu Yu.An Ant Colony Optimization Algorithm For Image Edge Detection[C]//IEEE Congress on Evolutionary Computation(CEC).Hongkong,2008:751-756.
[11]赵娜,王希常,刘江.自适应蚁群算法优化红外图像分割[J].计算机应用研究,2009,11:4375-4377,4381.
[12]于勇,郭雷.噪声图像中提取边缘的蚁群搜索算法[J].电子与信息学报,2008,30(6):1271-1275.
[13]田原嫄,孔银昌,崔凯,等.噪声对边缘定位精度的影响[J].武汉理工大学学报,2012(7):141-145.
[14]张驰,李丽芳,鲍济民,等.利用边缘检测算子所显示的数字图像本底噪声差异辨识伪造、变造图像[J].重庆理工大学:自然科学版,2013(4):110-112.
(责任编辑杨继森)
Edge Detection Algorithm of Image Based on Im proved Ant Colony Optim ization
WANG Dong,SHANG Kun
(China Airborne Missile Academy,Luoyang 471009,China)
Ant colony algorithm(ACA)has performed well in infrared image edge detection,but the parameters of ants need to bemanually configured according to the different image,this kind of situation is not conducive to the engineering application also reduces the algorithm efficiency.The paper proposed an edge detection algorithm of infrared image based on improved ant colony algorithm,and it used estimating ants`distribution area instead of random arranging the ants,increased the searching efficiency at sensitive area.At the same time a series of self-adaptive parameter was given to optimize the algorithm process and restrain precocious convergence,like the number of ants,the total lengthy of steps of a single ant,and the length of tabu-list.The results of themultiple-group experiments indicate that the parameters are suitable and it can shorten the time without reducing the effect.
edge detection;ant colony;adopted-parameter
:A
1006-0707(2014)07-0087-04
format:WANG Dong,SHANG Kun.Edge Detection Algorithm of Image Based on Improved Ant Colony Optimization[J].Journal of Sichuan Ordnance,2014(7):87-90.
本文引用格式:王栋,尚堃.基于改进蚁群算法的红外图像边缘检测方法[J].四川兵工学报,2014(7):87-90.
10.11809/scbgxb2014.07.025
2014-03-12
王栋(1987—),男,硕士,助理工程师,主要从事红外图像处理研究。
TP391.4
猜你喜欢
数学物理学报(2022年5期)2022-10-09
校园英语·上旬(2020年1期)2020-05-09
卷宗(2017年16期)2017-08-30
少儿科学周刊·儿童版(2017年5期)2017-06-29
学苑创造·A版(2017年3期)2017-04-27
通信产业报(2016年44期)2017-03-13
学苑创造·A版(2014年6期)2014-08-04
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
雕塑(1996年4期)1996-07-12
