Trimble MX2在城市道路测量中的应用
2014-06-27 05:47:31吴满意王占宏田怀启
测绘通报 2014年11期
吴满意,王占宏,田怀启
(1.武汉大学测绘学院,湖北 武汉 430079;2.国家测绘地理信息局第一地形测量队,陕西 西安 710054)
天宝测绘解决方案专栏
Trimble MX2在城市道路测量中的应用
吴满意1,2,王占宏2,田怀启2
(1.武汉大学测绘学院,湖北 武汉 430079;2.国家测绘地理信息局第一地形测量队,陕西 西安 710054)
一、引 言
车载移动测量技术是一种新兴的测量技术,也是当今测绘界最为前沿的科技之一。它是在机动车上装配全球导航卫星系统(GNSS)、相机系统(CCD)、惯性导航系统(INS)等先进的传感器和设备,在车辆高速行进中,快速采集道路及道路两旁地物的空间位置数据和属性数据,并同步存储在车载计算机系统中,事后基于点云与数字图像数据进行空间地理信息的提取与分析,形成内容丰富的空间信息数据库。
二、Trimble MX2移动测绘系统
Trimble MX2是一套安装在交通工具上的空间影像获取系统,该系统将高分辨率的激光扫描仪与精确的定位定姿系统相集成,用于获取具有地理参考信息的点云数据,满足各种行业应用。Trimble MX2系统适用于在各类型的陆上或水上交通工具上快速安装与拆卸。该系统采用模块化设计,在车辆高速行进过程中,能快速采集道路及道路两旁地物的空间数据和属性数据。系统组成如图1所示。
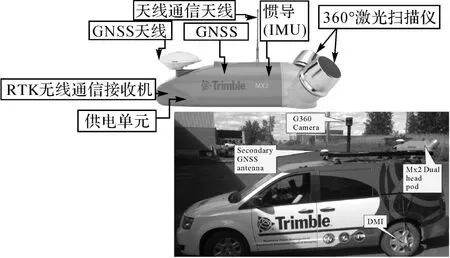
图1 Trimble MX2系统组成
三、数据采集与处理
Trimble MX2作业的基本内容包括:系统安装、基站(或控制点)布设、外业数据采集(POS数据/视频图像/LiDAR点云数据采集)、内业数据处理(POS数据解算、视频图像/LiDAR点云数据地理参考重建、提取成果数据)等内容。具体作业流程如图2所示。
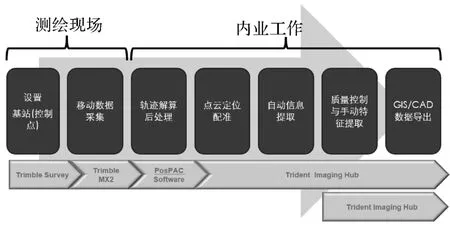
图2 Trimble车载移动测绘系统作业流程
1.基准站设置
根据这次试验测区范围和大地控制点分布情况,架设静态观测基站。该站距离测区最远端的距离约为5.38 km,确保了基站至MX2系统作业区的距离满足小于20 km的作业要求(超出30 km的范围则会影响采集精度);基站的采样频率设为1 Hz。
2.数据采集
在完成基站架设并确定基站开始工作后,即可在试验测区进行数据采集。在数据采集前,将移动测量车停靠在能锁定至少6颗卫星的空旷地方,原地静态采集10 min POS数据;然后启动移动测量车,进行POS系统初始化,使系统定位精度与姿态达到POS系统设定的精度要求;待初始化完毕后,移动测量车沿道路进行外业数据采集,采集时移动测量车的行驶速度保持在18 km/h左右,激光采集速率为40条扫描线/s,脉冲重复频率PPR为7.2 kHz,图像数据采样间隔为2 m;数据采集完成后,将移动测量车停靠在静态观测基站附近的位置,静态采集10 min POS数据,完成静态POS数据采集后,结束试验测区数据采集作业。
3.数据处理
数据采集完成后,将车载移动测绘系统获取的POS数据、激光点云数据与视频图像数据备份到移动硬盘上,进行内业解算处理。
(1)POS系统数据解算处理
将Trimble车载移动测绘系统MX2采集到的POS数据、基站记录的GNSS观测数据导入POSPac MMS软件中进行组合解算处理,采用单基站紧组合卡尔曼滤波算法,获得最佳平滑行车轨迹路线,也就是移动测量车载行进过程中的位置、姿态、加速度、角速率等信息。
(2)点云数据与图像数据的解算处理
(1)根据各断点在8条时间剖面反映特征的相似性,认定这8条剖面的断点应为同一条断层的反映,将其组合为F4正断层。该断层在QN-06V井区附近走向为N72°E,倾向为SSE,落差为205~315 m。在此基础上对QN-06V井区附近3#煤层的底板等高线进行了修正。
Trimble车载移动测绘系统在数据采集时获取的点云数据与视频图像数据需要进行外方位元素解算处理,获取实际地理坐标。该处理过程是通过Trimble Trident软件以POS数据解算得到平滑轨迹数据为基础,对激光点云GPS数据与图像GPS数据进行校正解算,获取具有实际地理坐标的点云数据与图像数据。
得到具有实际地理坐标的点云数据与图像数据后,通过Trimble Trident软件对图像数据与点云数据进行测区点云数据真彩色渲染,并将渲染后的点云数据与图像数据进行格式转换,将点云数据转换成可用于创建线划图的点云数据格式(CSV或LAS),将图像转换具有地理参考的图片格式(JPG)。
4.制图数据输出
获取的激光点云数据与图像数据,可根据实际项目的需求进行数据后处理,得到不同的成果数据,如数字线划图(DLG)、GIS数据、三维模型数据等。
(1)测区线划图与GIS数据
利用目标物矢量提取与GIS建库软件Trimble Trident提取点状物(灯杆、电线杆等)、线状地物(道路边线)及面状地物(居民地等),生成通用的GIS数据格式(SHP、MIF、DBF、DXF)。
(2)测区三维模型数据
在道路点云数据(目标物数字表面模型DSM)的基础上,通过三维建模软件Trimble Sketchup建立测区中道路及周边地物的三维模型。
(3)测区三维空间分析
Trident系统中提供基于点云或图像的自动或人工三维空间量测功能,如道路横向坡度测量、水平/垂直净距测量、视距测量等。
四、成果精度检测
对于车载移动测绘系统采集的数据精度,可通过将在点云数据中提取的地物点与RTK方式采集的控制点数据比对,进行精度验证。
采用GPS RTK采集控制点时,选择道路两侧或路面不同位置的地物点,如灯杆、斑马线与车道线的端角、路缘石端角等。通过Trimble Trident后处理平台中基于点云数据与图像数据提取同名地物点,进行平面误差与高程误差量测统计,见表1。
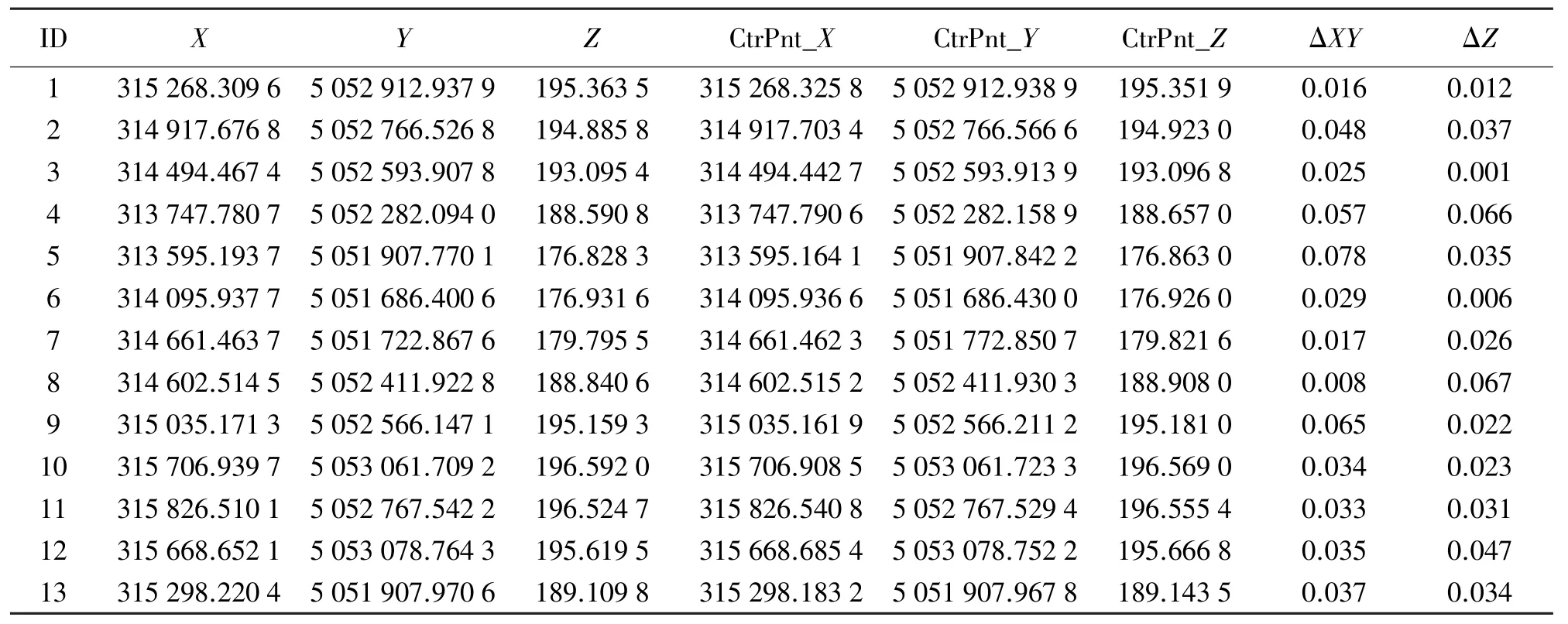
表1 车载移动测绘系统采集数据误差统计表
五、结束语
Trimble MX2车载移动测绘系统可以实现城市道路及道路两侧一定范围内目标物的快速采集,有效降低了外业数据采集的时间与劳动强度。随着基础测绘、地理国情普查、应急测绘保障,以及数字城市、智慧城市的不断推进与发展,数据的快速获取与快速处理成为测绘信息化生产的主要目标,同时街道景观的三维可视化已经成为数字城市、智慧城市的一项重要工作。车载移动测绘系统作为一种全新的地理空间数据采集方式,在地理空间数据采集与更新中必将发挥越来越大的作用。
(本专栏由天宝测量部和本刊编辑部共同主办)
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
铁道通信信号(2020年8期)2020-02-06 09:13:18
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
探索科学(2017年4期)2017-05-04 04:09:47
中国公共安全(2017年11期)2017-02-06 05:28:09
中国交通信息化(2016年8期)2016-06-06 03:56:25
移动通信(2015年17期)2015-08-24 08:13:10
电源技术(2015年2期)2015-08-22 11:28:14