
双馈风力发电系统MPPT控制
2014-06-26 10:21:08赵梅花范敏陈军钟沁宏
电气传动 2014年3期
赵梅花,范敏,陈军,钟沁宏
(1.洛阳理工学院机电工程系,河南洛阳471023;2.上海大学机电工程与自动化学院,上海200072;3.中钢集团耐火材料有限公司,河南洛阳471039)
1 引言
最大风能追踪(MPPT)是风力发电的基本问题。在一定的风速下,存在一个最佳发电机转速使得系统捕获最大风能。常用的MPPT方法有[1-2]:基于最佳叶尖速比控制、功率反馈法和爬山法。爬山法功率采样频率和爬山步长都需根据系统实际情况经反复试验选取。最佳叶尖速比控制需要测量风速,在风电现场使用较为不便。功率反馈法缺点是输出最佳功率—风速曲线很难获得,文献[3-4]从定子功率优化的角度,利用系统稳态功率平衡的关系来获取定子侧有功功率的最佳给定值,但由于风机和DFIG的损耗难以准确估算,风机实际工作在“次最佳状态”。
本文将基于风力机最佳叶尖速比和功率反馈法相结合,提出一种基于最佳功率—转速曲线的MPPT控制策略。首先对DFIG采用转速、电流双闭环控制,并控制其工作于最佳叶尖速比(ω*=λoptν/R),测出一定风速范围内风机的最佳功率—转速曲线。将测得的最佳功率—转速曲线应用于基于功率闭环控制的双馈风力发电系统,实现系统的MPPT 控制。该方案的特点是采用实验方法测出风力机的最佳功率—转速曲线,避免了复杂的最佳给定有功功率的计算,采用不需检测风速的功率闭环实现风机的MPPT控制。仿真和实验验证了控制方案的可行性和正确性。
2 风机运行特性
根据贝茨(Betz)理论,风机捕获风能Pwind为

式中:ρ为空气密度;R为叶片半径;v为风速。CP( )β,λ为风能利用系数,是桨叶节距角β和叶尖速比λ的函数,它反映了风机将风能转化为机械能的效率。
叶尖速比λ由下式定义:

定桨距(β固定)条件下,本文被模拟风机的CP(λ)曲线由图1所示。
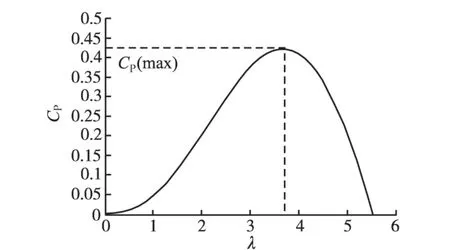
图1 风机的λ-CP特性曲线Fig.1 λ-CPcharacteristic curve of wind turbine
由图1可知,在某一风速下,存在一个最佳转速,使风机叶尖速比λ达到最佳(λopt),此时CP=CP-max,由式(1)可知此时风机捕获的风能最大。在某一风速下,调节发电机转速ω,使风机运行于最佳转速ωopt,即可实现最大风能捕获。
3 功率反馈MPPT原理
图2为定桨距风机Pwind(ω,v)曲线。现以图2阐述功率反馈法实现MPPT控制的过程及原理。
由图2 知,风机在每一风速下均存在一个最佳工作点(如:A,B,C),将一定风速范围内的最佳工作点连接起来构成风机最佳功率—转速曲线Popt(ω)。当风机运行于Popt(ω)上时,风机捕获最大风能。
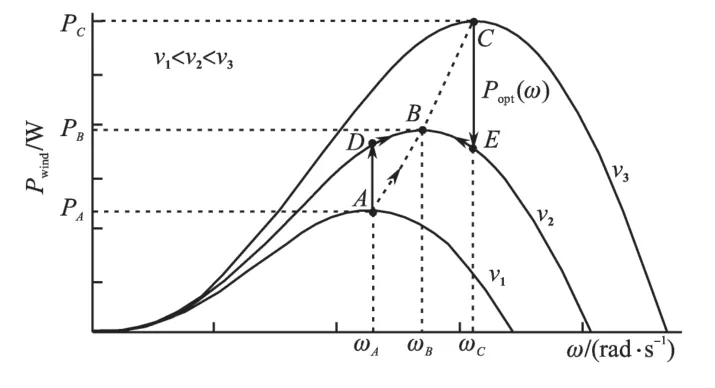
图2 定桨距风机Pwind(ω,v)曲线Fig.2 ThePwind(ω,v)characteristic curves of wind turbine
设风速为v1时系统稳定运行于A点,风机捕获风能Pwind和风机输出机械功率Pmech均为PA。当风速增大为v2时,风机工作点由A点跳变为D点,Pwind由PA跳变为PD。由于发电机惯性,Pmech仍为PA,此时Pwind>Pmech,发电机转速上升,风力机和发电机将分别沿着功率—转速曲线的DB轨迹和最佳功率曲线的AB轨迹运行。当分别运行至功率—转速曲线和最佳功率曲线的交点B时,功率重新达到平衡,此时发电机稳定运行于对应于风速v2下的最优转速ωB,风机捕获最大功率PB。同理也可分析风速从v3变为v2时的MPPT过程。
4 最佳功率—转速曲线的获取
功率反馈法的目标是控制Pmech运行于风机最佳功率—转速曲线Popt(ω)上,而DFIG功率闭环的控制对象是定子有功功率P1,所以必须首先寻找二者的关系。
采用发电机惯例,将包括风轮、发电机转子所组成风力机组传动链的机械参数归算到发电机侧,可将传动机构近似看做一个刚体[6],根据功率平衡原理:

式中:P1为DFIG 定子输出有功功率;J,Tf分别为传动机构惯性时间常数和摩擦转矩;PFe,PCu分别为DFIG铁耗和定、转子铜耗。
由式(3)可得系统稳态时功率关系:

从式(4)可知,在最大风能跟踪过程中要使Pmech按照Popt(ω)规律变化,必须相应地改变定子有功功率给定。一般获取的方法是通过优化计算获得[3-4]。利用式(4)及PCu中定子电流与P1的关系得到一个关于P1的二次方程,然后求其极值作为。但这种实时计算的方法一是增大了单片机的运算量,二是系统摩擦损耗和DFIG铜耗、铁耗很难准确计算。
本文采用实验方法,测出风机在一定风速范围内的最佳功率—转速曲线,避免了复杂运算。
当发电机转速和风速满足最佳叶尖速比时,Pwind=Pmech=Popt,风机捕获最大风能。若以发电机转速为系统控制目标,采用如图3 所示的转速闭环控制策略[5],在定子无功功率恒定的情况下,控制电机转速与模拟风机的给定风速满足最佳叶尖速比,此时测得的P1(ω)不仅满足式(4)中与Popt(ω)的关系,也包含了系统各种损耗的影响。在一定风速范围内连续测量得到与风机最佳功率—转速曲线Popt(ω)对应的发电机定子给定功率—转速曲线(ω)。避免了复杂的运算和系统损耗的影响。
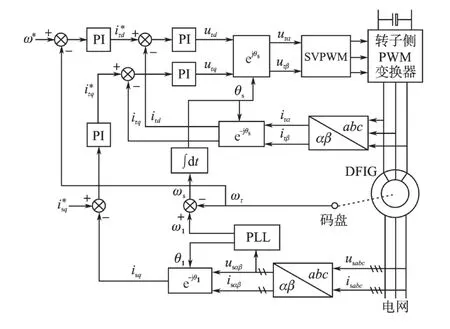
图3 发电机转速闭环矢量控制策略Fig.3 Speed closed-loop vector control strategy of generator
5 MPPT控制策略
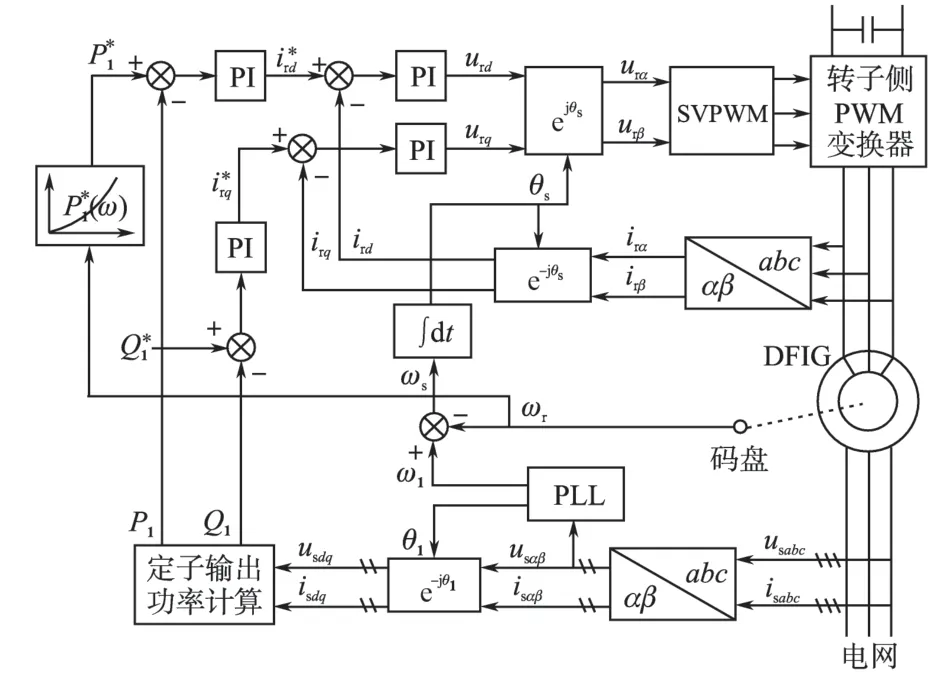
图4 功率反馈MPPT控制策略Fig.4 MPPT control strategy based on power feedback
6 仿真及结果分析
搭建双馈风力发电系统仿真模型,用绕线式异步电机-直流电机机组代替双馈发电机组,直流机模拟风机特性。仿真参数如下:异步机额定功率3 kW,定子额定电压380 V/50 Hz,同步转速n1=1 500 r/min;直流电机额定功率3 kW,额定转速1 500 r/min,额定电压220 V,额定电流17.5 A,励磁电压220 V,励磁电流0.56 A;直流母线电压250 V。
风速变化时系统响应如图5所示。
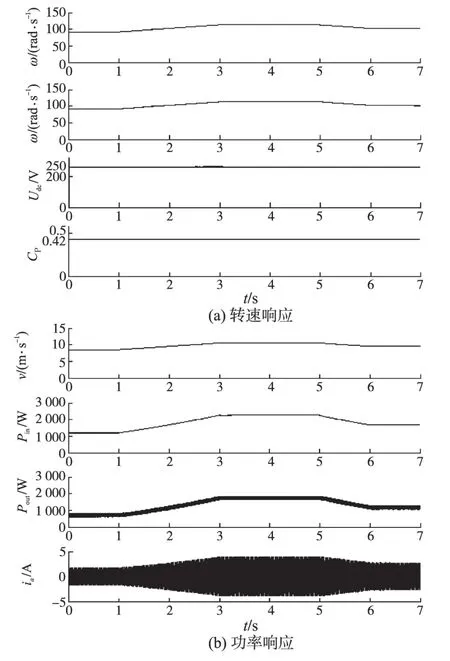
图5 系统风速变化响应Fig.5 System response to wind variation
图5为风速变化时系统的响应曲线。风速在1 s 时开始以1 m/s 的斜率由9 m/s 上升至11 m/s,又以同样的斜率在5 s 时开始下降至10 m/s。图5a 从上到下代表的物理量依次为满足最大风能跟踪的给定转速、发电机的实际转速、母线电压、实际风能利用系数。图5b 从上到下代表的物理量依次为风速、风机轴上输入功率、发电机输出功率、A相输出电流。
仿真结果表明:在允许风速范围内的每一风速下,系统能很好地实现最大风能跟踪。
7 实验及结果分析
实验室用直流机-绕线式异步机机组搭建双馈风力发电系统实验平台结构如图6所示。实验参数同仿真。采用infineonXC2785作为系统的主控芯片,网侧变换器PWM频率10 kHz,转子侧变换器PWM频率5 kHz。

图6 双馈风力发电系统实验平台结构Fig.6 The system experimental platform of doubly-fed wind power generation
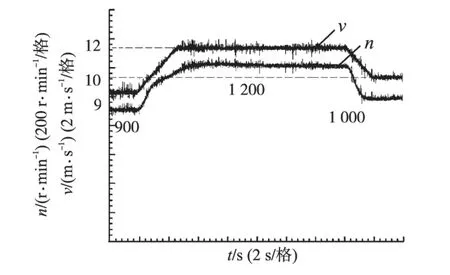
图7 风速改变时转速响应波形Fig.7 Speed response to wind variation
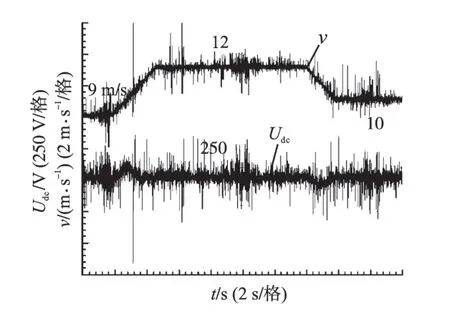
图8 风速改变时直流母线电压响应Fig.8 DC link voltage response to wind variation
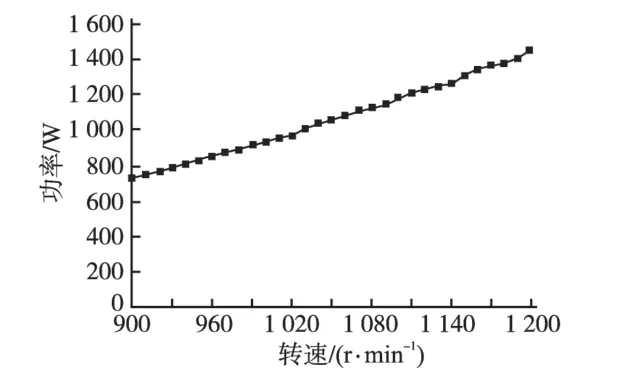
图9 定子功率给定—转速曲线Fig.9 Given-stator power—speed curve
将图9 所测曲线用于图4 所示的功率反馈MPPT控制策略,实验波形如图10所示。
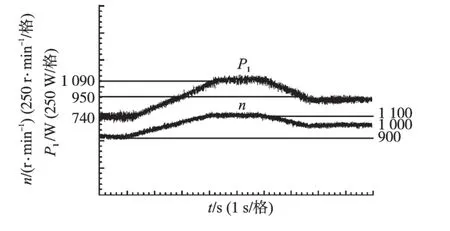
图10 风速改变时功率响应波形Fig.10 Active power response to wind variation
图7 表明当风速改变时,发电机转速有快速跟踪响应能力,使发电机运行于该转速下的最佳转速,实现最大风能跟踪。由图8 可知当风速改变时,直流母线电压基本保持恒定,保证整个系统的稳定运行。图9 是用实验方法测得的定子最佳功率给定—转速曲线(ω)
图10 表明了发电机输出功率随风速变化的跟踪能力。实验结果验证了控制方案的可行性和正确性。
8 结论
本文将最佳叶尖速比和功率反馈法MPPT控制相结合,提出基于最佳功率—转速曲线的MPPT控制策略。采用实验方法测得发电机定子给定功率—转速曲线并应用于功率闭环矢量控制策略,避免了复杂的实时运算,克服了系统损耗对最大风能跟踪性能的影响。实验结果表明:系统能在变风速情况下实现最大风能跟踪。
[1]吴政球,干磊,曾议,等.风力发电最大风能追踪综述[J].电力系统及其自动化学报,2009,21(4):88-93.
[2]Datta R,Ranganathan V T.A Method of Tracking the Peak Power Points for a Variable Speed Wind Energy Conversion System[J].IEEE Transactions on Energy Conversion,2003,18(1):163-168.
[3]胡家兵,贺益康,刘其辉.基于最佳功率给定的最大风能追踪控制策略[J].电力系统自动化,2005,29(24):32-38.
[4]曾志勇,冯婧,周宏范.基于功率给定的双馈风力发电最大风能捕获策略[J].电力自动化设备,2010,30(6):25-30.
[5]沈阳,阮毅,赵梅花,等.双馈风力发电系统转子侧PWM变换器及其对双馈感应发电机的运行控制[J].电机与控制应用,2012,39(1):52-56.
[6]钟沁宏,阮毅,赵梅花,等.双馈风力发电转子侧PWM变换器功率控制策略[J].电机与控制应用,2012,39(12):46-50.
猜你喜欢
江苏船舶(2023年5期)2023-12-19 01:07:04
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
燃气涡轮试验与研究(2019年5期)2019-12-01 02:12:36
创新作文(小学版)(2019年21期)2019-01-11 15:12:05
风机技术(2018年1期)2018-03-21 09:15:10
汽车工程(2016年11期)2016-04-11 10:57:53
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:45
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:27
