
3种抗饱和PID控制方案的实验研究
2014-06-26 10:21:14彭萌程国扬
电气传动 2014年3期
彭萌,程国扬
(福州大学电气工程与自动化学院,福建福州350108)
1 引言
在工业控制系统中,要求系统的受控变量快速、平稳且准确地跟踪给定目标值,以保证产品质量和提高生产效率。目前,工业控制系统广泛采用PID控制技术[1]。PID的控制结构简单,且不依赖于系统模型;在未知扰动的情况下,通过PID的积分控制作用可以消除稳态误差、提高系统精度。但是在控制信号幅值受限、且给定目标出现大跳变的情况下,积分控制容易产生积分器饱和(integrator windup)的现象,使系统出现大超调和低频震荡,甚至导致不稳定。另外,积分控制造成系统瞬态性能对扰动或参考目标的变化过于敏感,在实际应用中非常麻烦。为解决这些问题,提出了一些改进型PID,如非线性PID[2],变参模糊智能PID[3],参数优化PID[4],双自由度PID[5],以及各种抗饱和PID[6-7]。在现有的抗饱和PID 控制方案中,应用比较成熟的是条件积分法(conditional integration)和反馈抑制饱和法(tracking back calculation)两类方法。这两类方法都不依赖于对象模型。在对象模型已知的情况下,可利用关于模型的知识,来改进PID 抗饱和设计方案,如文献[7]提出了基于积分项预测的抗饱和方案,并在交流变速电机上取得较好的效果。
本文通过一个基于TMS320F2808DSP的直流伺服电机实验平台,对上述3 种典型的抗饱和PID 方案进行实验研究,分析比较其特点,以便为实际应用提供参考和指导。实验中,为克服常规测速法的相位滞后,采用基于2 阶Lagrange 插值多项式的瞬时速度估计方法,用在直流伺服电机的转速控制。实验结果表明,3 种抗饱和方案所设计的速度伺服控制器,虽然在算法实现的复杂度有差异,但均可在较大的目标转速范围内实现理想的瞬态性能和稳态精度。
2 3种抗饱和PID控制方案
2.1 遇限消弱积分法
最常用的抗饱和方法是条件积分法,包括:积分项限幅法、积分分离法、饱和停止积分法、遇限消弱积分法等。遇限消弱积分法是其中比较有效的一种抗饱和方法,其基本思想是:当执行器处于饱和、且误差信号与控制信号同方向(同号)时,积分器停止更新(其值保持不变),除此之外,积分器正常工作。即,在饱和情况下,只进行有助于削弱饱和程度的积分运算。在离散控制(采样周期为T)模式下,相应的控制律如下:

比例环节为

微分环节为

积分环节为

其中

实际的有效控制输出量为

其中饱和限幅函数sat(u)定义为

式中:umax为控制信号的最大允限幅值。
2.2 反馈抑制抗饱和PID
如图1 所示,反馈抑制抗饱和PID 是把计算的控制量超出其限幅范围的偏差值通过反馈进入积分器,从而迫使控制量返回到限幅值之内。在离散时间(采样周期T)域中,其控制律可以表示为

积分环节为

式中:kc为抗饱和反馈增益;esat为控制量的饱和误差,esat(k)=sat(u(k))-u(k)。
实际的有效控制输出量为v(k)=sat(u(k))。

图1 反馈抑制抗饱和PID控制方案Fig.1 Anti-windup PID with tracking back calculation
2.3 积分项预测抗饱和PID
积分项预测抗饱和PID 是文献[7]针对变速电机控制而提出的,本节对其重新整理和简化,使其适用于更一般的一阶线性受控对象。考虑带扰动和控制信号限幅的一阶对象,设其传递函数为

则对应的微分方程如下:

式中:d为未知的输入扰动。
采用PID控制律:

其中积分项ui可以表示为

式中:v=sat(u),u≠v表示积分饱和状态;wi为低通滤波器的参数值;为积分项稳态值之预测值。
当系统采用PID 控制律来跟踪参考目标r 时,对应的误差动态方程为

在稳态时,误差为零,控制量仅包含积分项,其值为

由于扰动d值未知,无法直接利用上式来计算ui-ss。根据误差动态方程,可得:

即可以利用上式等号右边的表达式来预测(估计)积分项的稳态值ui-ss为

为避免积分项出现跳变且降低微分带来的噪声,引入一个低通滤波器来对积分项进行平稳充值(更新):

式中,wi决定了在积分饱和期间对积分项之值进行更新的快慢。完整的控制方案如图2所示。
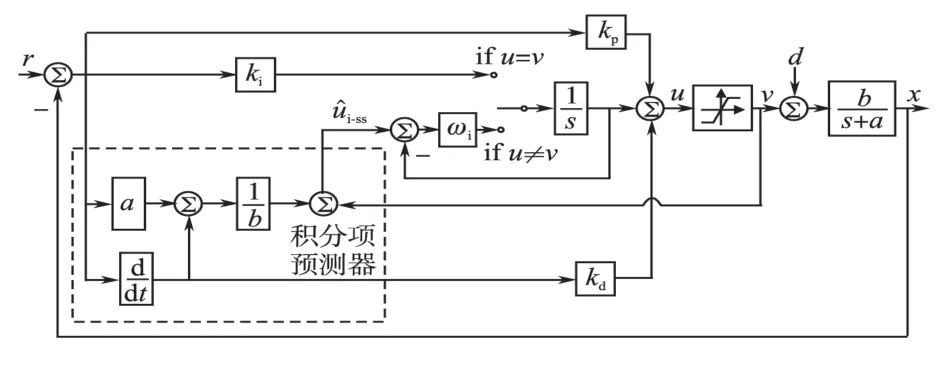
图2 积分项预测抗饱和PID控制方案Fig.2 Anti-windup PID with integral state predictor
3 基于伺服电机的实验研究
3.1 实验系统及其数学模型
所设计的电机转速伺服系统如图3 所示,采用TMS320F2808DSP 作为电机控制的主芯片,被控对象是型号为Pittman 9393A006-R8 的直流伺服电机,带有500 线的双路正交脉冲信号的光电码盘,采用基于L298N的功率驱动模块和12 V稳压直流电源。
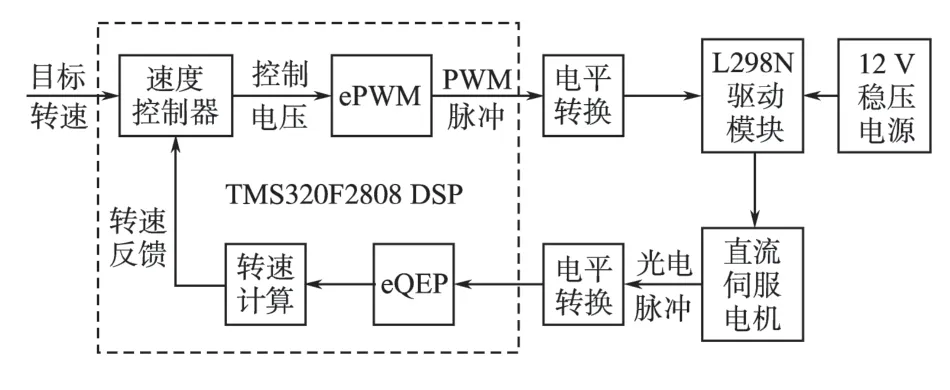
图3 直流电机速度伺服系统的结构图Fig.3 Block diagram of DC motor speed servo system
直流电机的动态数学模型可以表示为

式中:J为转动惯量;B为粘性阻尼系数;ω(t)为电机的机械转速;Tl为负载转矩;Kt为电磁转矩系数;u(t),i(t)分别为输入电压和电枢电流;R,L为电阻和电感;Ke为反电动势系数。
由于电路的响应速度通常比机械子系统的响应快得多,因此可忽略电路响应的瞬态过程,从而得到如下简化的模型:

从输入电压u(t)到转速ω(t)的传递函数可写成:

其中

经实验辨识,此电机从输入电压(V)到转速(rad/s)的传递函数为

输入电压的饱和限幅值为umax=12 V。
3.2 电机瞬时转速的估计
在电机伺服系统中,广泛采用光电编码器检测电机转子位置,再通过M 法、T 法、M/T 法或其它改进方法来计算转速。这些方法得到的是对应时间段的平均转速,而不是瞬时速度。当电机转速较慢,且光电编码器的分辨率较低时,检测速度存在较大的误差。本文采用多项式插值的方法来估计转速信号。考虑把电机的位置轨迹近似成一个以时间t为自变量的2阶函数,其对应的2阶Lagrange插值多项式[8]为

其关于时间t的导数如下:

式中:t0,t1,t2,f(t0),f(t1),f(t2)分别为离当前时刻t最近的3个位置事件对应的时间和位置。
假定在t0,t1,t2这3 个时间点对应的位置增量相等,即:f(t1)-f(t0)=f(t2)-f(t1)=N,其中N为一个位置事件所对应的编码器脉冲数。令Δt1=t1-t0,Δt2=t2-t1,Δt3=t-t2,则可利用式(17)来估计当前时刻t的瞬时转速(rad/s):

式中:N0为电机旋转一圈所产生的脉冲数。
利用TMS320F2808DSP的QEP边缘捕获电路可以准确地获得编码器脉冲(即位置事件)对应的时间。式(18)中的Δt1,Δt2为位置事件发生时,捕获周期寄存器的值对应的时间(s),Δt3为当前时刻的捕获定时器的值对应的时间。电机瞬时速度的准确估计,为高性能的速度控制提供了有利条件。
3.3 实验结果及分析
把本文介绍的3 种典型的抗饱和PID 控制方案用于电机转速的调节。控制算法在TMS320F2808DSP 上编程实现,选择离散采样周期T=3 ms。根据计算得到的|u(k)|值来设置PWM比较值(决定占空比的大小)从而控制电机转速;根据u(k)的正负极性,改变DSP 的GPIO 端口的输出电平来设置驱动模块L298N 的电机输入电压的方向。分别对各控制方案的参数值进行整定,使得各方案都具有尽可能好的控制性能。
遇限消弱积分法的参数值为

反馈抑制饱和法的参数值为

积分项预测抗饱和PID的参数值为

为方便实验的连续进行,把目标转速设置为每隔0.6 s在600 r/min与1 800 r/min(分别折算为20π与60π rad/s)之间阶跃跳变的方波信号。在Code Composer Studio v3.3 集成环境中进行控制实验,采集的数据转换到Matlab 进行处理和绘图,结果如图4~图6 所示(转速换算为r/min 值)。从图中可以看出,当给定速度发生大范围阶跃跳变时,各种控制方案下电机都能够快速、准确、平稳、无超调地跟踪给定速度,其2%调节时间在表1 中列出。遇限消弱积分法的控制参数最少(与常规PID 相同),但其控制性能毫不逊色,其控制信号很平滑;反馈抑制饱和法比遇限消弱积分法多了一个可调参数(抗饱和反馈增益),只要参数值选择恰当,也能取得满意的控制性能;积分项预测抗饱和PID 的结构较复杂,参数整定相对困难一些,但最终的控制性能并无明显的优势。

图4 条件积分法(遇限消弱)的实验结果Fig.4 Experimental results for conditional integration

图5 反馈抑制饱和法的实验结果Fig.5 Experimental results for tracking back calculation

图6 积分项预测抗饱和PID的实验结果Fig.6 Experimental results for anti-windup PID with integral state predictor

表1 转速控制的2%调节时间(s)Tab.1 Settling time(in seconds)of speed control
4 结论
本文给出了遇限消弱积分法、反馈抑制饱和法、积分项预测抗饱和法这3种抗饱和PID控制方案的具体设计,并应用于直流伺服电机的转速调节,其中采用基于2阶Lagrange插值多项式和QEP边缘捕获电路的瞬时速度估计方法。利用TMS320F2808DSP进行了实验研究。结果表明,用这3种抗饱和方案设计的速度控制系统都可以在大的目标转速范围内实现快速、平稳和无静差的伺服跟踪,其控制性能相近。从控制算法实现和参数整定的复杂度来看,遇限消弱积分法最为简单方便,而反馈抑制饱和法次之,积分项预测抗饱和PID的结构最为繁琐,且需要依赖于对象模型。对实际系统而言,简单有效的解决方案通常就是最合适的方案。本文介绍的抗饱和PID技术及其实验比较,可为实际伺服控制系统的设计提供参考。
[1]Ang K H,Chong G,Li Y.PID Control System Analysis,Design,and Technology[J].IEEE Transactions on Control Systems Technology,2005,13(4):559-576.
[2]Seraji H.A New Class of Nonlinear PID Controllers with Robotic Applications[J].Journal of Robotic System,1998,15(3):161-181.
[3]张小鸣,龙仕玉.基于DSP 直流电机模糊免疫PID 控制器研究[J].电气传动,2013,43(2):65-68.
[4]郑国良,王杰.交流伺服系统无超调最优PID 控制器设计[J].微电机,2013,46(2):29-32.
[5]舒鑫东,庄圣贤,关晓明,等.交流永磁同步电机二自由度PID控制[J].电气传动,2009,39(12):54-56.
[6]Choi J-W,Lee S-C.Anti-windup Strategy for PI-type Speed Controller[J].IEEE Transactions on Industrial Electronics,2009,56(6):2039-2046.
[7]Shin H-B,Park J-G.Anti-windup PID Controller with Integral State Predictor for Variable-speed Motor Drives.IEEE TransactionsonIndustrialElectronics,2012,59(3):1509-1516.
[8]Ghosh P.Numerical Methods with Computer Programs in C++[M].北京:清华大学出版社,2008.
猜你喜欢
数理化解题研究·高中版(2021年11期)2021-12-16 06:45:17
初中生学习指导·提升版(2021年3期)2021-09-10 07:22:44
系统工程与电子技术(2021年8期)2021-07-27 08:39:18
Chinese Chemical Letters(2019年12期)2020-01-14 07:54:30
中学生数理化·高一版(2018年4期)2018-05-08 09:52:00
课程教育研究·新教师教学(2015年12期)2017-09-27 16:09:40
物理化学学报(2015年7期)2015-12-30 12:13:18
振动工程学报(2015年2期)2015-03-01 01:16:04
燕山大学学报(2014年4期)2014-03-11 15:28:50
河南科技(2014年15期)2014-02-27 14:12:50
