腐蚀算法在遥感影像建筑物边缘提取中的应用
2014-06-24 14:33朱忠国吕京国
城市勘测 2014年6期
朱忠国,吕京国
(1.北京建筑大学测绘与城市空间信息学院,北京 100044; 2.现代城市测绘国家测绘地理信息局重点实验室,北京 100044)
腐蚀算法在遥感影像建筑物边缘提取中的应用
朱忠国1∗,吕京国2
(1.北京建筑大学测绘与城市空间信息学院,北京 100044; 2.现代城市测绘国家测绘地理信息局重点实验室,北京 100044)
基于高分辨率遥感影像建筑物识别与分析是目前摄影测量与遥感领域的研究热点之一。而腐蚀算法在建筑物提取和识别中的应用相对较少。本文主要叙述了腐蚀算法在其中的应用。通过边缘提取、二值化处理、建筑物主方向分析、边缘结构元素选取,用腐蚀算法将非建筑物边缘腐蚀掉的同时也能获得较好的建筑物轮廓信息并对其进行标绘。通过多次实验验证,结果表明该算法识别率较高,准确性较好,具有一定的实用和参考价值。
腐蚀算法;结构元素;边缘提取;遥感影像
1 引 言
随着航空航天技术的进步,以航空航天飞机、人造地球卫星为运载平台的遥感技术极大拓展了人们的对地观测领域,由于它在测绘、城市规划、环境保护、地质勘探、农业和林业以及军事领域应用广泛,因此产生了十分可观的经济效益和显著的社会效益[1,2]。在高分辨率遥感影像的城市区域上,建筑物和道路占据了绝大部分的地物信息,伴着城市化进程的加快,地理数据库中最需要更新的部分就是建筑物,建筑物识别与提取技术的研究仍然处于比较活跃的阶段,因为它对城市发展规划、数字城市和国防等方面有着重要的作用[3,4]。
当前,对于建筑物目标的识别研究主要有两大类。一种是分割图像,寻找建筑物候选区域,对候选区进行处理,重新构建建筑物规则几何轮廓;另一种是先对图像中各种基本几何元素进行寻找,如直线、圆弧、多边形等等,然后再对这些几何元素间的位置关系进行分析,构建出建筑物的几何轮廓[5,6]。对于复杂环境下,腐蚀算法也具有较好的效果,可以根据具体环境,选择合适的结构元素,即可以将非建筑物轮廓腐蚀掉又能够完成建筑物轮廓的提取。
2 技术路线
本文的主要技术路线如图1所示,预处理部分主要为图像去噪和图像增强,核心部分是对分割二值化后边缘保留较完好的二值图像进行选取和建筑物主方向上建筑物边缘的像素点排列分析,经过分析后进而确定较好的边缘约束算子,因为该算子是基于建筑物主方向的,所以该算子可以对主方向上边缘部分进行保留并将其余非边缘部分腐蚀掉,进而可以得到图像中建筑物边缘轮廓,接着就可以进行建筑物的边缘轮廓标绘工作。

图1 技术路线示意图
2.1 图像预处理及二值化
(1)Roberts边缘提取
边缘检测常常是图像分析和理解的第一步。它利用图像一阶导数的极值或者二阶导数过零点的信息来提取边缘。对于图像中变化比较缓慢的区域,相邻的灰度变化不大,因而梯度幅值较小,而在图像边缘地带,相邻像素的灰度变化剧烈,所以梯度幅值较大。因此用一阶导数幅值的大小确定边缘位置;用二阶导数的符号判断像素是在边缘亮的一边还是暗的一边,过零点的位置就是边缘位置[7]。
在边缘算子中,典型的一阶导数算子有Roberts算子、Sobel算子、Prewitt算子、Krisch算子;二阶导数算子有Laplacian算、Gauss-Laplacian算子。实验中选用Roberts边缘算子进行预处理。
Roberts算子也叫交叉差分算子,是一种利用局部差分寻找边缘的算子,它考虑图像2×2邻域的处理。梯度对应一阶导数算子,对于图像函数f(x,y),它的梯度向量为:

该向量的幅值为:

为简化计算,幅值也可以表示为:


在图像处理中常用差分来代替微分,并利用小区域模板卷积来近似计算梯度值Roberts算子表达式为:

其中,f(i,j)表示处理前(i,j)点的灰度值;g(i,j)表示处理后该点的灰度值,写成模板的形式为:

通过该模板可以完成图像内容边缘的粗提取。
(2)二值化处理
将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。在数字图像处理中,二值图像占有非常重要的地位。首先,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像所有灰度大于或等于阈值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。将边缘提取后的图像导入MATLAB中进行二值化处理,在MATLAB中二值化以后为记录0和1,以此对边缘提取后图像进行二值化处理。
2.2 主方向分析
如图所示,图中红色为建筑物的主方向,绿色为其垂直方向,理论上,房屋的边缘与主方向是平行的,实际中,分析的是与主方向和其垂直方向上的建筑物边缘特征,分别标于图中的红色圆与绿色圆中,分别如图2(a)、图2(b)所示:
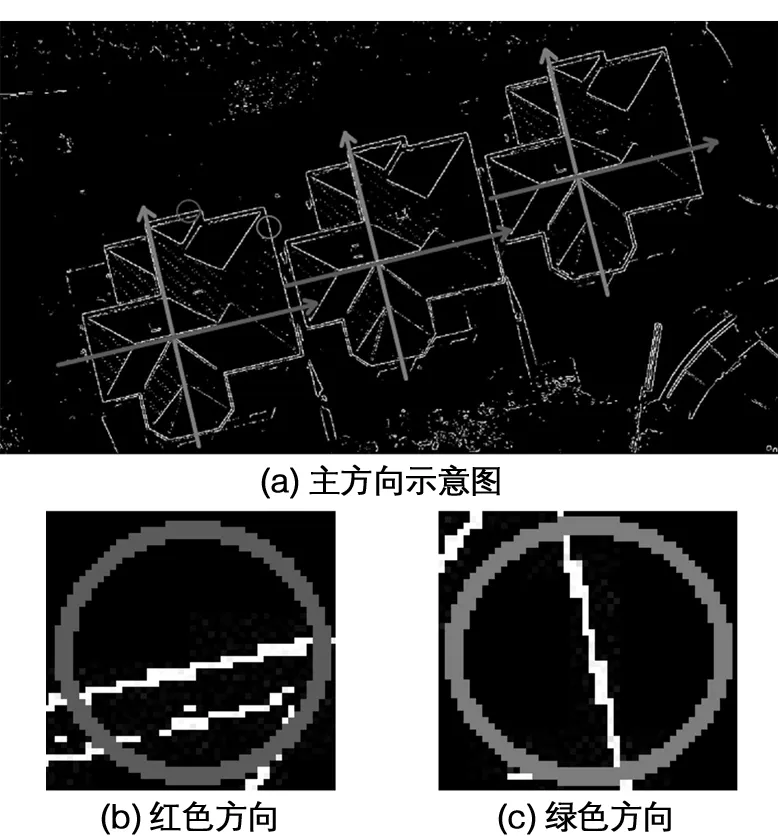
图2 主方向分析图
分析其在空间中的特点,实验中在红色和绿色方向上分别选取了5部分边缘处进行人工分析,在Photoshop中放大选取部分,分析其空间排列规律,确定结构元素,进而确定结构元素中心的特征,如图3(a)所示,分析可知红色方向上以某点为中心,设该中心点为(i,j),则该中心点像素值满足:

同理分析可知绿色方向上以某点为中心,设该中心点为(i,j),则该中心点像素值满足:

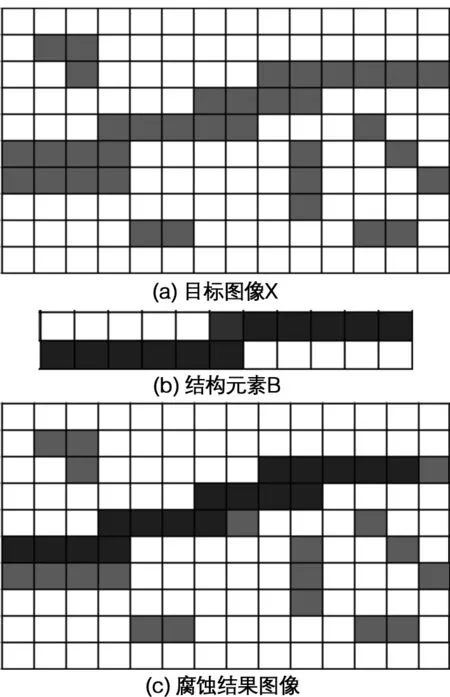
图3 结构元素
因此,可以将这两个条件作为区别建筑物边缘与非边缘的约束条件,即确定了结构元素,如图3(b)所示,将满足约束条件的像素点保留下来,其值为1,对于不满足约束条件的像素点将其腐蚀掉,其值为0,腐蚀后结果图像如图3(c)所示,由此可见主方向分析是腐蚀算法结构元素选择和确定的重要基础。
2.3 形态学腐蚀
腐蚀是一种数学形态学运算,作用是消除物体的边界点,使边界向内收缩的过程,可以把小于结构元素的物体去掉,这样选取不同大小的结构元素就可以去除不同大小的物体[8]。
(1)基本原理
设X为目标图像,B为结构元素,则目标图像X被结构元素B腐蚀的数学表达式为:

其中X表示集合平移的位置量,Θ是腐蚀运算的运算符。
腐蚀运算的含义是:每当在目标图像中找到一个与结构元素相同的子图像时,就把该子图像中与结构元素的原点位置对应的那个像素位置标注出来,目标图像上被标注出来的所有像素组成的集合,即为腐蚀运算的结果。其实质就是在目标图像中标出那些与结构元素相同的子图像的原点位置的像素。
图3示意了用结构元素B对目标图像X进行腐蚀运算的过程与结果。图3(a)中白色部分代表背景,灰色部分代表目标图像X;图3(b)是结构元素B,其中心点位置用红色标注,在图像形态学处理中,结构元素是一个非常重要的因素,它的尺寸、形状直接影响着形态学处理结果,在实践中,要根据实际应用的需求来选择合适的结构元素;图3(c)中的黑色部分表示腐蚀后的结果,灰色部分表示目标图像被腐蚀掉的部分。
(2)算法描述
获取目标图像的宽和高,分别为n和m;为了防止越界,从第1行、第6列开始对像素点进行处理,行数的处理范围为1~(m-1),列数的处理范围为6~(n-6);以结构元素原点的位置为中心,将结构元素B中黑色位置对应的12个像素值相加求和,实验中阈值选为5,将和的值小于5的像素中心赋值为0,否则赋值为1;依次循环对行列处理范围内的所有点进行处理。最终得到建筑物边缘二值图像。
2.4 轮廓标绘
本部分主要工作是在原始的彩色图像中将建筑物的轮廓标绘出来,通过腐蚀后的图像获取边缘像素在图像中的位置,并在原彩色图像中将对应位置标注出来,比起单纯的只标注边缘像素点的位置,为了更加突出图中建筑物的轮廓,可以做加宽处理,即在边缘像素点的水平和垂直方向上进行拓展,设像素点的坐标为(i,j)且其值为1,同时将以该点为中心的3×3的像素矩阵中的其他8个像素值都赋值为1。这样处理后的视觉效果更好,通过轮廓标绘处理,用图者可以直观的在原始图像上看见被标注的建筑物轮廓,更直观的对建筑物进行识别。
3 实验与分析
为了验证本文提出的基于腐蚀算法建筑物边缘提取的有效性,实验中利用该腐蚀算法对真实数据进行实验。实验数据为卫星所拍摄的高分辨率遥感图像。使用VS2010软件将原始的彩色图像读入内存,如图4所示;接着将其转化为灰度图像,如图5所示;采用Roberts算子对灰度图像进行边缘提取,结果图像如图6所示;将边缘提取后的图像二值化,结果图像如图7所示;对二值图像进行主方向边缘像素排列特点进行分析,确定腐蚀算法的结构元素,并对二值图像进行腐蚀处理,腐蚀后的图像如图8所示;根据腐蚀后图像保留下来的边缘像素位置对原图进行标注,可在水平和垂直方向的3×3的像素矩阵中进行拓展,让边缘的显示效果更加明显,如图9所示。

图4 原始图像

图5 原始图像的灰度图像
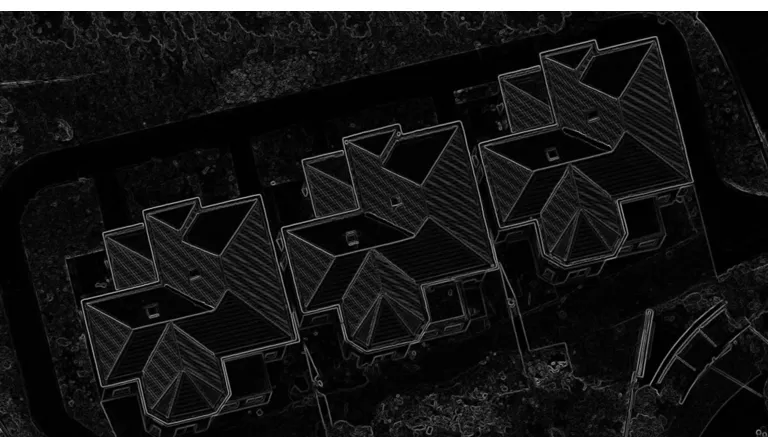
图6 边缘提取图像
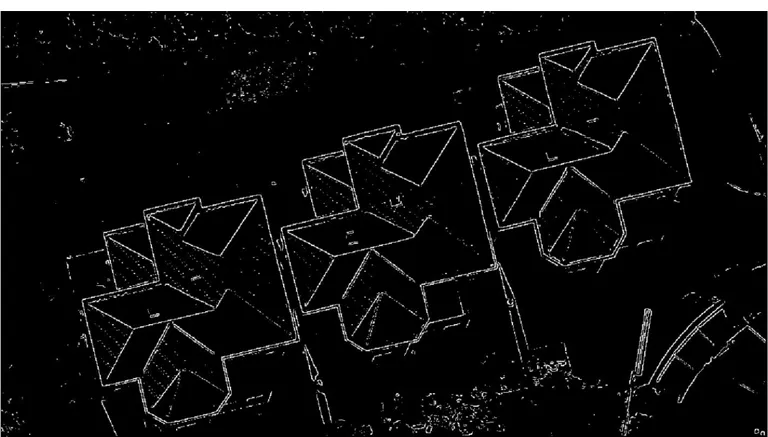
图7 二值化图像
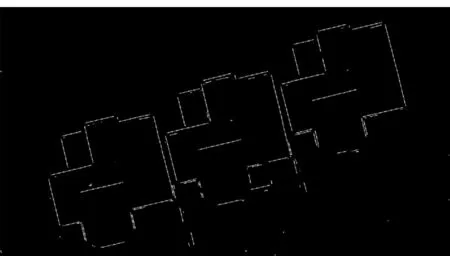
图8 腐蚀后图像

图9 结果图像
通过观察以上的图像可以明显看出,采用本文所使用的算法进行建筑物边缘提取可以有效保留建筑物轮廓并将非建筑物腐蚀掉,具有较好的效果。
4 结论与展望
遥感影像目标提取是遥感图像的一个重要应用。从实验结果可以看出,本文提出的算法对于边缘相互垂直的建筑物目标具有较高的识别率,自动标绘的准确度也较好。但是此腐蚀算法的结构元素需要人为分析,因而主观因素较大。此外,在实验中,该算法的效果好坏与预处理中边缘提取的算子选取也有很大的关系,在尽量保持建筑物边缘完整性的条件下,应当使除建筑部边缘部分外的部分越细碎越好,这样在腐蚀算法中更容易将这些细碎的部分腐蚀掉,而得到的结果图像效果也越好。但是对于阴影轮廓与建筑物主方向近似平行的情况处理效果不是很理想。今后将会对阴影轮廓与建筑物主方向近似平行的情况加以研究并实现。
[1] 承德保.基于多特征组的遥感图像中建筑物目标自动识别与标绘的方法[J].电子与信息学报,2008(12):2868~2870.
[2] 张占睦,芮杰.遥感技术基础[M].北京:科学出版社, 2007:1~4.
[3] Noronha S,Nevatia R.Detection and description of buildings from multiple aerial images[J].IEEE Trans.On Pattern A-nalysis and Machine Intelligence,2001,23(5),501~518.
[4] F.Rottensteiner,J.Trinder,S.Clode,and K.Kubik.Building detection by fusion of airborne laser scannerdata and multi-spectral images:Performance evaluationand sensitivity analysis[J].ISPRS J of Photogrammetry and Remote Sensing,2007(2),135~149.
[5] 周俊,晏非,孙曼.基于区域分割合并的建筑物半自动提取方法[J].海洋测绘,2005(1):58~60.
[6] 侯蕾,尹东,尤晓建.一种遥感图像中建筑物的自动提取方法[J].计算机仿真,2006(4):184~187.
[7] 刘海波,沈晶,郭耸.Visual C++数字图像处理技术详解[M].北京:机械工业出版社,2010:246~276.
[8] 周嘉伟.基于数学形态学腐蚀运算的人脸特征提取[J].延边大学学报,2006(6):139~141.
Application of Erosion Algorithm to Extract the Edges of Buildings in Remote Sensing Image
Zhu Zhongguo1,Lv Jingguo2
(1.School of Geometrics and Urban Information,Beijing University of Civil Engineering and Architecture,Beijing 100044,China; 2.Key Laboratory of Modern Urban Surveying and Mapping,NASMG,Beijing 100044,China)
Recognition and analysis of buildings based on high resolution remote sensing images is a hot topic in the research of photogrammetry and Remote Sensing.But erosion algorithm is relatively few applied in extraction and recognition of buildings.This paper mainly showed the application of erosion algorithm in it.By edge extraction,binarization processing,analysis of the main building direction and selection of edge structure element,erosion algorithm has been used to erode edges of non-building and good building outlines were obtained which have been marked.Through several experiments,the experimental results prove that this method is high in recognition and has a good precision,which has certain practical and reference value.
erosion algorithm;structure element;contour extraction;remote sensing images
1672-8262(2014)06-17-04
P236
B
2014—07—01
朱忠国(1986—),男,硕士研究生,研究方向:摄影测量与遥感。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
装备制造技术(2020年1期)2020-12-25
应用数学(2020年2期)2020-06-24
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
自动化学报(2017年5期)2017-05-14