
剪式单元直线阵列可展结构的稳定性
2014-06-23 16:22:35王三民
哈尔滨工业大学学报 2014年9期
李 博,王三民,袁 茹
(西北工业大学机电学院,710072西安)
剪式单元直线阵列可展结构的稳定性
李 博,王三民,袁 茹
(西北工业大学机电学院,710072西安)
为获得剪式可展结构失稳时的临界载荷,开展剪式单元直线阵列可展结构的稳定性研究.首先基于杆件的弹性变形分析,建立了剪式单元的结构失稳极限载荷表达式,然后将其应用于阵列组合而成的可展结构,获得了这种结构的稳定性条件.结果表明:单元个数、杆件柔度和位置角等参数共同影响结构失稳时的临界载荷,随着单元个数增加或杆件柔度增大,结构稳定性逐渐降低;位置角受到单元个数影响,不能单独作为判断结构失稳的依据.最后进行可展结构稳定性仿真分析,并将仿真结果与理论分析结果对比,两者吻合性较好,证实了本文提出方法的正确性.
剪式结构;直线阵列;稳定性;失稳载荷;仿真
可展机构是一般空间可展结构的基本体系,是实现结构机构形态变化、展开折叠的基本结构机构元素.文中研究的剪式可展结构是杆式可展结构中的一种,剪式铰是组成剪式可展结构的基本单元,由两个连杆经销轴连接成“X”型结构,具有运动收缩功能,在航天(如大口径天线、太阳帆)、航空(如可伸缩停机坪,临时机库)、建筑(如开合穹顶、救灾房屋)等领域应用广泛.
进入20世纪70年代后,航天科技发展对大型结构提出了迫切要求,国内外众多研究机构和学者都做了大量研究.如美国DARPA(defense advanced research projects agency)实施ISAT(innovative space-based antenna technology)计划旨在研究口径100 m左右的可展式天线.1995年,英国剑桥大学Burgess教授[1]在对航天飞行器Envisat的太阳帆可展结构进行地面展开实验时,发现了由于单元机构的运动不同步,导致整个机构的展开运动卡滞现象,并首次提出了一种考虑运动同步性的先进单元机构(APDM);2002年,美国格林研究中心学者Botke等[2]针对可展结构在展开运动中运动不同步现象,设计了一种同步铰链,提出了利用机构的死点位置来实现构型稳定性的思想;2008年,土耳其学者Kipe等[3]对用于可展结构的单元机构进行了分类,并对单元机构的运动特性进行了分析,指出在实现预期展开形状时,单元机构的合理选择十分重要.目前,我国研究人员对可展机构也做了大量研究,如浙江大学陈向阳等[4]开展的六棱柱单元组合而成的可展天线结构设计研究,清华大学赵景山等[5]采用螺旋理论对以剪刀机构为单元机构面阵列而成的组合机构的运动特性进行的理论研究等.
现有文献表明,我国对可展结构的研究主要集中在几何构型[6-9]以及机构的动力学特性[10-14]方面,注重其可展开性能,但是,在单元机构稳定性以及临界载荷方面研究较少.本文以一个剪式铰单元为基础,研究其在横向力作用下,单元失稳的条件以及相应的临界载荷.继而将结论推广到剪式单元直线阵列组合结构相应的失稳条件及其影响因素,为研究阵列组合机构展开过程中运动同步性和展开到位时的构型稳定性提供研究依据.
1 剪式单元结构的稳定性
单独一个剪式单元由两个连杆经销轴连接而成,如图1(a)所示,AB和CD两杆之间可绕销轴相互转动,两杆末端铰接在固定面上,杆长相等,且铰链O将两杆长度等分,结构与水平面的夹角为γ,B点受水平横向载荷P,假设杆件为理想均质直杆,不计杆的质量和铰链处的摩擦力,则由静力学方程求得铰接处的内力见式(1).
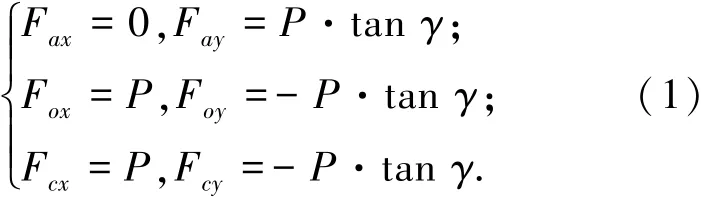
式中Fax、Fay、Fox、Foy、Fcx、Fcy均为铰接处相应的内力.
因为AB杆受到水平的横向载荷作用,在O点和CD杆铰接,则杆AB绕铰接点O有较大变形.CD杆因为绕Z轴变形较小,所以计算时只考虑CD杆的轴向变形.现以一个剪式单元为研究基础,考虑其在失稳时的临界载荷.如图1(b)所示.在A点建立整体笛卡尔坐标系A-xy,在A点和B点分别建立随动坐标系o1-x1y1、o2-x2y2.
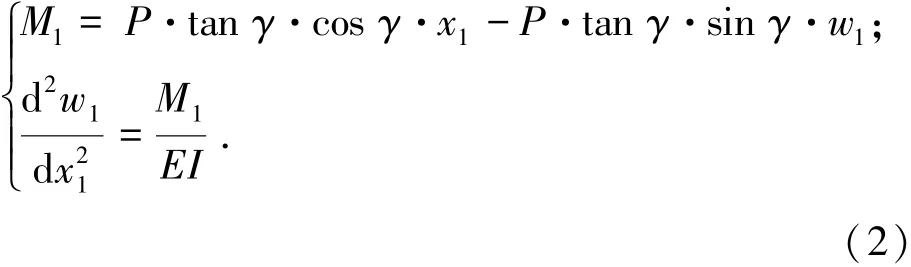
在AO段,设弯曲变形发生于杆件的一个主惯性平面内,抗弯刚度为EI,沿x1的轴线方向为正向;距原点o1为x1的任意截面的挠度为w1,弯矩为M1,则AO段挠曲线的弯矩及近似微分方程为
令
则

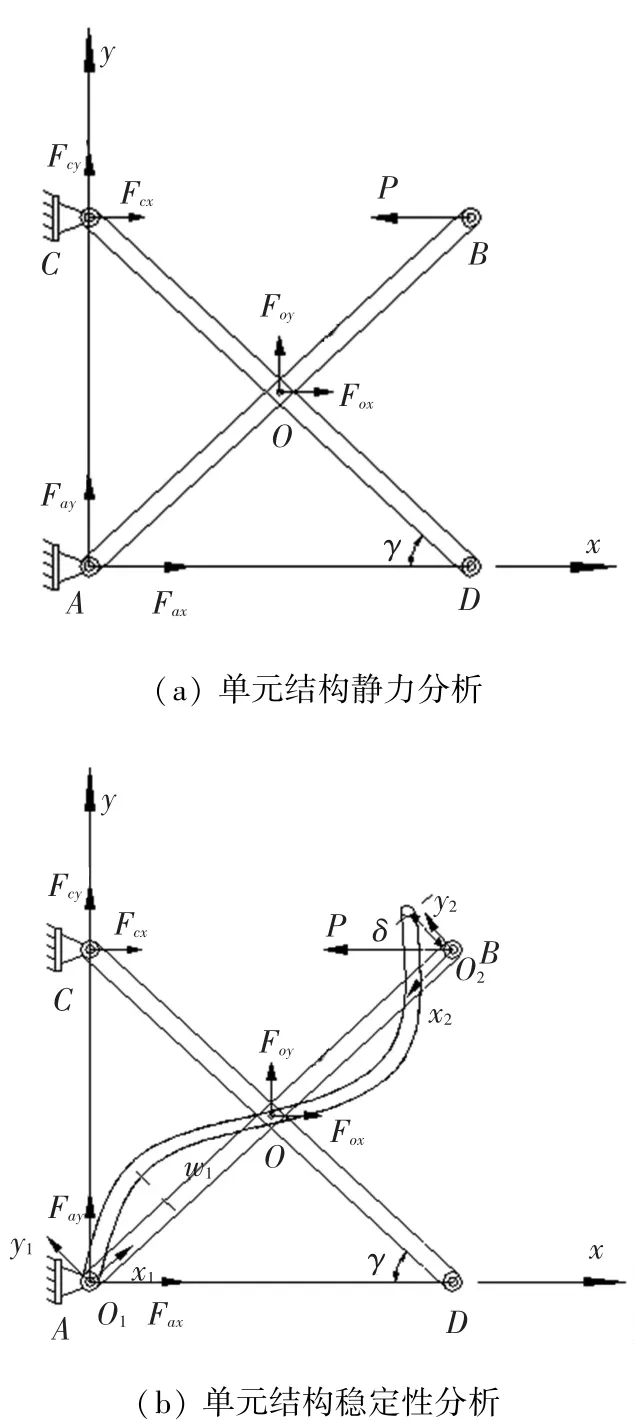
图1 剪式单元结构稳定性分析
该方程为二阶常系数非齐次线性微分方程,由待定系数法求得对应特解=cotγ·x1.则方程通解为
同理,在BO段,沿x2的轴向为正向,距原点o2为x2的任意截面挠度为w2,弯矩为M2,B点处最大挠度为δ,则BO杆弯矩及该段挠曲线近似微分方程为

由剪式单元相应的边界条件求得积分常数C1、D1、C2、D2以及挠度δ为
由式(6)解得单元挠度为
由式(7)可知,当αL趋近于π或βL趋近于π/2时,δ趋近于无穷.因此,在横向载荷趋近于α和β对应的临界载荷时,无论横向载荷增量如何微小,杆件都将失去稳定,相应的临界载荷分别为
求得P1、P2后,选择其中的较小值作为单元的临界载荷.
2 剪式单元直线阵列组合可展结构的稳定性
将剪式单元沿x轴进行阵列,相邻剪式单元之间通过运动副相连,组成线性阵列结构,如图2所示.在Cartesian坐标系下,由右往左,单元数逐渐增多,剪式结构与水平面的夹角为γ,任取第i个单元进行静力学分析,其受力如图2下部所示.
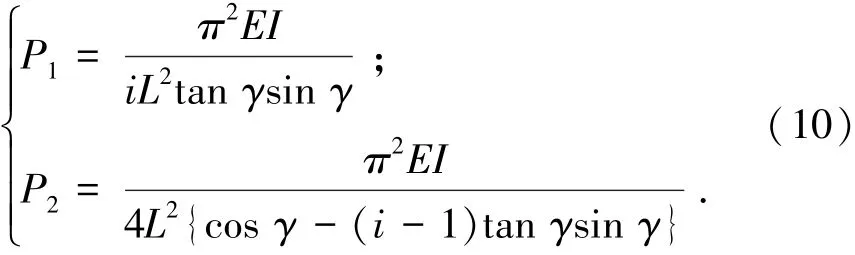
由图2可知,第i个单元的受力由i和γ两个变量进行控制.根据剪式单元的分析过程,推导得到在N个剪式单元组合结构中第i个单元的临界载荷为
临界载荷P1、P2随角度γ以及单元个数i的双向变化如图3、4所示.
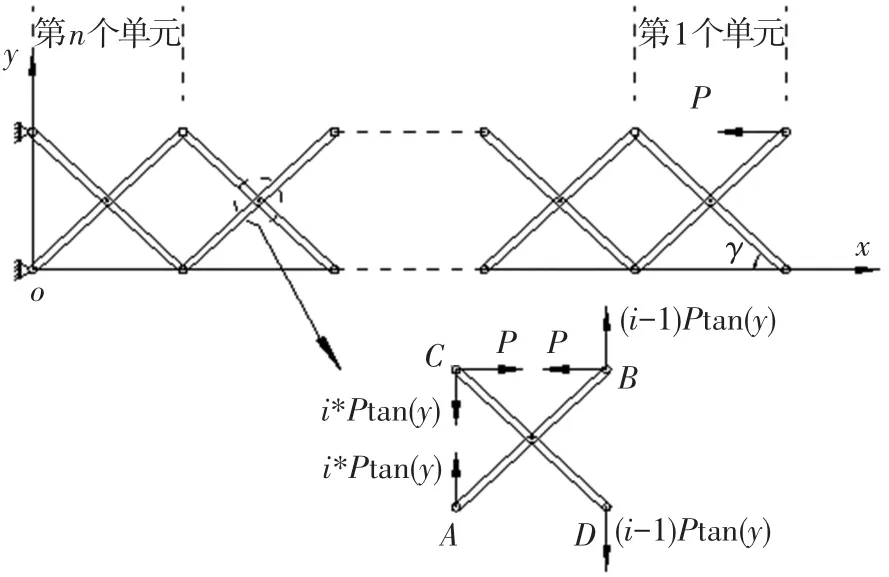
图2 剪式单元线性阵列可展结构图
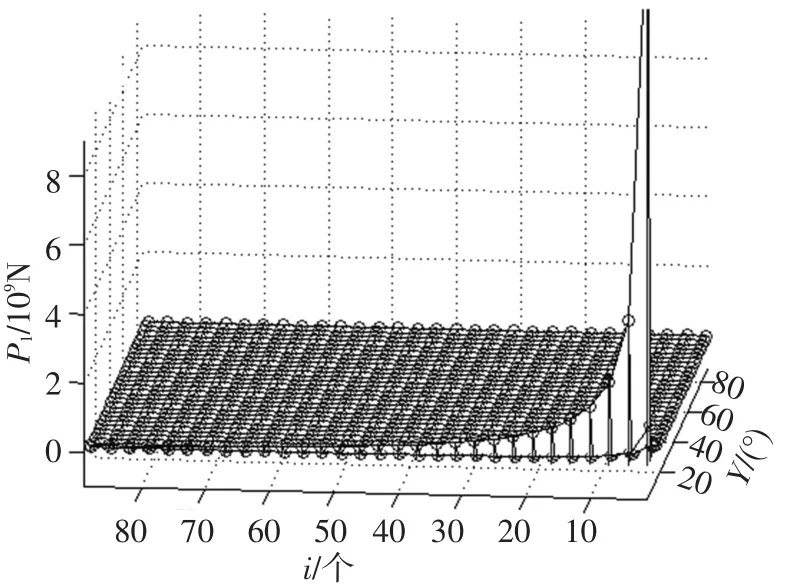
图3 临界载荷P1双向变化
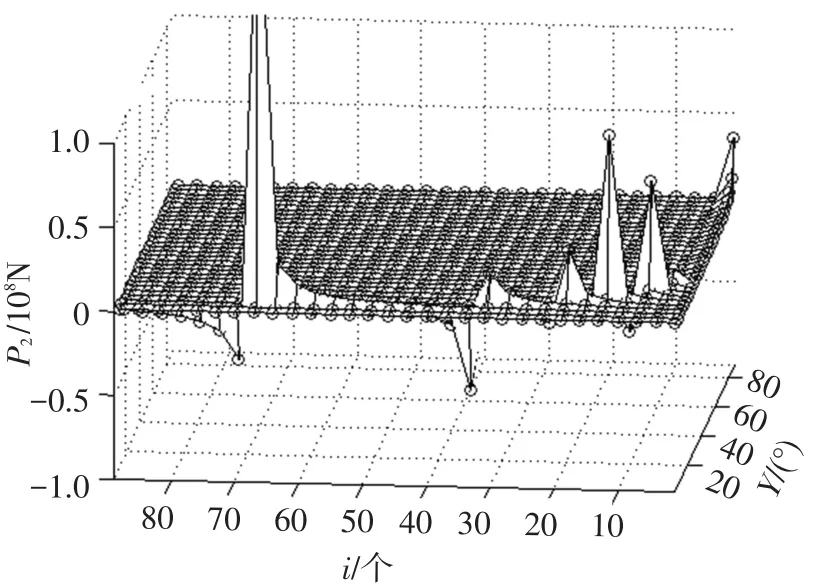
图4 临界载荷P2双向变化
由图3可知,单元个数i和夹角γ共同影响临界载荷.在计算剪式结构的稳定性时,必须充分考虑每个单元的临界载荷大小,选出最小临界载荷作为剪式结构的失稳载荷.由图4可知,临界载荷P2有一部分为负值,说明这部分对应的剪式单元不能作为判断失稳的依据,要重新寻找其他单元来判断失稳.
3 算例分析与仿真
3.1 剪式单元组合结构理论计算值
三组剪式基本单元沿x轴阵列,每组单元可绕中间的铰接点相互转动,相邻的剪式单元之间通过铰接进行连接,如图5所示.该结构的第一个基本单元受到轴向的载荷P作用,铰接是理想约束,且此结构在平面内运动,与水平面的夹角γ取为60°.
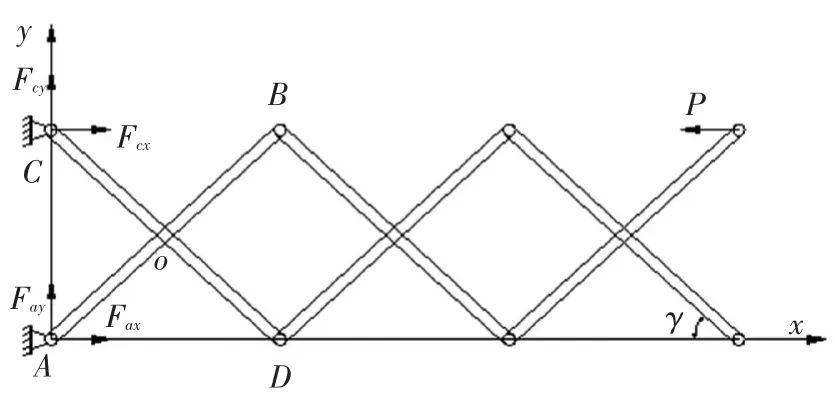
图5 线性剪式组合结构受力
由于所分析的剪式单元结构是在空间中展开,因此忽略重力影响.杆的横截面形状为圆管,外径和内径分别为0.122、0.114 m,杆长度为L= 4m,使用材料为Q235A,弹性模量E=2e11Pa,由上述推导公式计算得杆横截面的惯性矩为

将以上参数代入式(10)得到,在γ=60°时,相应的剪式结构最小失稳载荷为P1=1.133 4× 106N,对应的单元个数i=3,即需要用第3个单元去求结构的失稳载荷.
在i=3时,失稳载荷P与夹角γ的变化关系如图6所示.杆的柔度为λ=uL/i′,其中,i′=I/A ,相应的长度因数u1=i tanγsinγ,u2=4{cosγ-(i-1)tanγsinγ}.在i和γ确定的情况下,柔度λ随着杆长L变化,则失稳载荷P相对于L的变化如图7所示.
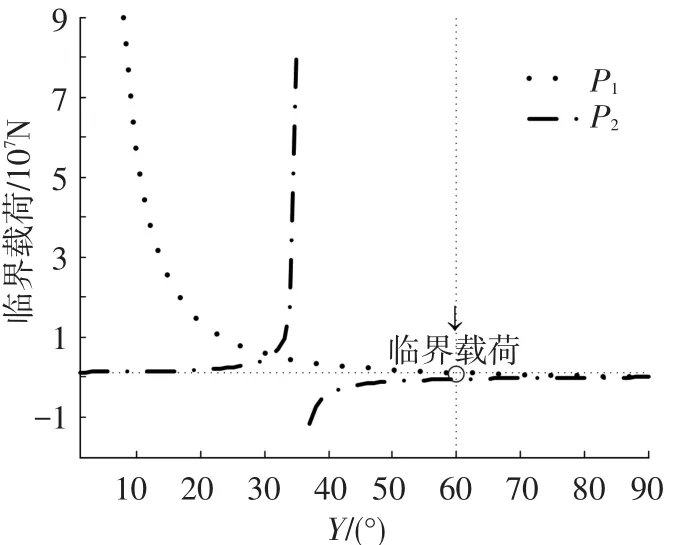
图6 临界载荷与夹角γ趋势图
由图6可知,结构与水平面夹角γ为60°时,临界载荷为1.133 4×106N.当剪式结构与水平面夹角小于32°时,P2<P1,需要利用P2的相应公式来计算结构的失稳载荷;当剪式结构与水平面夹角大于32°时,P2<0,不能作为判断失稳的依据,需要利用P1的相应公式来计算结构的失稳载荷.同时可以看出,在i=3时,剪式结构的临界载荷随夹角γ的变化较小,说明结构整体稳定性较好.由图7可知,在i和γ确定的情况下,失稳载荷随着柔度λ增大而逐渐减小至接近于0,符合实际工况.
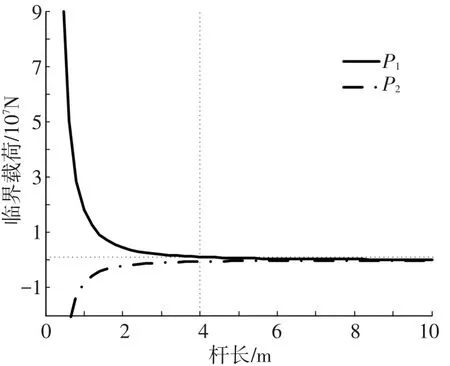
图7 临界载荷与杆长L趋势图
3.2 剪式单元组合结构有限元仿真
依据已知物理量完成建模,选取BEAM188单元将该线性结构划分为1 200个单元;选取载荷子步为100,弧长半径为4,选用Full Newton-Raphson方法求解[15],得到剪式结构的载荷-位移曲线如图8所示.
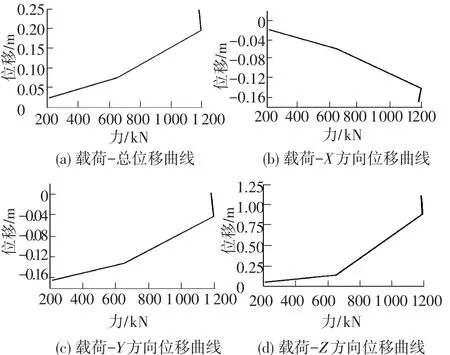
图8 剪式线性结构载荷-位移曲线
在图8(a)中,随着载荷增大,杆的变形也逐渐增大,在载荷达到1.183×106N时,杆接近于以90°的形式直线增长,此时结构已失稳.同时由图8发现,得到的失稳载荷和由式(10)计算可得在i=3,γ=60°时理论失稳载荷值1.133 4×106N相比,相对误差约为4.38%.误差的一些原因可能表现在受力分析时没有考虑变形后的位移,并且忽略了铰接处的一些变形,同时,在进行ANSYS仿真时,单元划分的多少,以及载荷步的选取也有一些影响.但仿真结果验证了理论计算是可以接受的.
4 结 论
1)由图8可知,剪式结构临近失稳时,最大变形约为0.187 5m,并且变形主要体现在Y轴方向,在Z轴几乎没有变形,说明结构变形主要是在XY平面内完成的,和理论分析时考虑的一致.
2)比较图6~8可以发现,3单元剪式结构失稳载荷的理论计算值和仿真分析结果较为接近,可以作为验证依据.依次类推,可以得到n单元剪式直线阵列组合结构的失稳载荷,为后续复杂剪式结构的稳定性研究提供研究基础.
3)在进行剪式结构稳定性研究时发现,单元个数、杆件柔度和位置角等参数共同影响结构失稳时的临界载荷.随着单元个数增加或杆件柔度增大,结构稳定性逐渐降低,同时应充分考虑到每个单元在夹角γ下其临界载荷的变化,选择最小的载荷值作为结构的失稳载荷.
[1]BURGESSSC.The design of an advanced primary deployment mechanism for a spacecraft solar array[J].Journal of Engineering Design,1995,6(4):291-307.
[2]BOTKEM,MURPHY D,MURPHEY T,et al.Zero Deadband. Multiple Strut Synchronized Hinge for Deployable Structures[C]//Proceedings of the 36th Aerospace Mechanisms Symposium.Cleveland:Ohio,May,15-17,2002: 1-12.
[3]KIPE G,ERES S,KISISEL A U.A family of deployable polygons and polyhedral[J].Mechanism and Machine Theory,2008,43:627-640.
[4]陈向阳,关富玲.六棱柱单元可展天线结构设计[J].空间科学学报,2001,21(1),68-72.
[5]ZHAO JS,CHU F I,FENG Z J.Themechanism theory and application of deployable structures based on SLE[J].Mechanism and Machine Theory,2009,44:324-335.
[6]RASKIN I,ROORDA J.Nonlinear analysis of uniform pantographic columns in compression[J].Canadian Metallurgical Quarterly,1999,125(12):1344-1348.
[7]MIEDEMA B,MANSOURW M.Mechanical jointswith clearance:a three-mode model[J].Journal of Engineering for Industry,1976,98(4):1319-1323.
[8]BELDA E P.Constructive problems in the deployable structures of emilio perez pinero[C]//Proceedings of the 2ndInternational Conference MARAS 96.1996: 23-34.
[9]FANNING P,HOLLAWAY L.The deployment analysis of a large space antenna[J].International Journal of Space Structures,1993,8(3):209-220.
[10]周益君,关富玲.考虑杆件弹性和三维间隙铰机构动力学研究[J].哈尔滨工业大学学报,2012,44(10): 122-127.
[11]白争锋.考虑铰间间隙的机构动力学特性研究[D].哈尔滨:哈尔滨工业大学航天工程系,2011:5-11.
[12]张春,王三民,袁茹.空间可展机构弹性动力学特性研究[J].机械科学与技术,2007,26(11):1479-1482.
[13]GUAN Fuling,SHOU Jianjun,HOU Guoyong,et al. Static analysis of synchronism deployable antenna[J]. Journal of Zhejiang University Science A,2006,7(8): 1365-1371.
[14]阎绍泽,申永胜,陈洪彬.考虑杆件柔性和铰间隙的可展结构动力学数值模拟[J].清华大学学报,2003,43(2):145-148.
[15]武思语,罗伟.ANSYS工程计算应用教程[M].北京:中国铁道出版社,2004.
(编辑苗秀芝)
Stability of linear array deployable structures based
on structure of scissor-like element
LIBo,WANG Sanmin,YUAN Ru
(School of Mechatronics,Northwestern Polytechnical University,710072 Xi’an,China)
In order to get the buckling load of deployable structures,stability of linear array deployable structures based on structure of SLE were studied.The paper established a structural instability limit load expression of SLE based on analysis of the elastic deformation of bar,which is applied to the array combination of deployable structure.Then the condition of the stability of this structure is obtained.Results indicate that: Buckling critical load were affected by the bar parameters such as the number of units,bar flexibility and position angle.With the increase of the number of units or the bar flexibility,structural stability gradually reduced;The position angle were affected by unit number,which cannot be used separately as the basis for judging structure instability.Deployable structure stability simulation analysis results and the theoretical analysis results are compared each other,confirming the correctness of the proposed method in this paper because of the experiment data well.
deployable structure;linear array;stability;buckling load;simulation
TH113.2
A
0367-6234(2014)09-0050-05
2013-12-13.
国家自然科学基金资助项目(51175422).
李 博(1986—),男,博士研究生;王三民(1961—),男,教授,博士生导师.
李 博,yunfenglibo@126.com.
猜你喜欢
华南理工大学学报(自然科学版)(2022年3期)2022-04-29 03:27:54
工程力学(2021年5期)2021-05-25 10:05:04
四川建筑(2021年1期)2021-03-31 01:01:46
科学与生活(2021年33期)2021-03-26 14:15:16
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
建筑机械化(2020年7期)2020-08-15 06:41:32
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
科技创新与品牌(2016年8期)2016-09-29 22:25:52
广西电力(2016年5期)2016-07-10 09:16:44
