
无耦合运动微创手术器械的设计与实验
2014-06-23 16:22:35付宜利邱雪芹徐殿国
哈尔滨工业大学学报 2014年9期
潘 博,付宜利,邱雪芹,徐殿国
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,150080哈尔滨;2.哈尔滨工业大学电气工程及自动化学院,150001哈尔滨)
无耦合运动微创手术器械的设计与实验
潘 博1,2,付宜利1,邱雪芹1,徐殿国2
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,150080哈尔滨;2.哈尔滨工业大学电气工程及自动化学院,150001哈尔滨)
为增加微创手术器械操作的灵活性,提高主从操作性能,设计一种新型无耦合运动微创手术器械.在分析耦合运动产生的原理和现有消除耦合运动方法的基础上,提出一种在腕部传动轴中心打孔走线的微创手术器械设计方法,研制出具有4个自由度的无耦合手术器械.该无耦合手术器械采用钢丝进行传动,可实现术中快速更换,并具有使用信息记录功能.求解手术器械及主手的运动学,研究手术器械主从式控制方法,并建立主从控制实验平台.实验结果表明:器械腕部单独运动时,器械腕部与两个手指之间位置相对不变,消除了耦合运动,具有较好的主从操作性能,有利于微创手术操作.
微创手术;机器人;控制;器械;耦合运动
微创手术具有创伤小、恢复快等优点,得到了广泛地应用.机器人技术与微创外科技术相结合,改善了医生进行微创手术的环境和工具,提高了手术质量[1].目前,医疗机器人技术已经成为国际前沿研究热点之一[2],美国、欧盟、以色列、日本、韩国等国家纷纷将其作为未来高技术研究和战略性新兴产业之一[3-4].
在机器人微创手术中,需要将狭长的手术器械通过10 mm的小孔探入体腔来进行相关手术操作,手术器械末端执行器的运动精度和灵活度将影响到手术的质量和效果.da Vinci系统中的Endowrist系列手术器械在技术上比较成熟,包含分离钳、剪刀、单极电凝、双极电凝等工具,器械杆部直径为5~10 mm[5].器械依据不同种类一般具有3或4个自由度,使用钢丝进行传动,为保障器械运动的精确性和可靠性,每使用10次就需更换新的手术器械[6-7].Zeus系统作为早期微创手术机器人的成功案例,已开发出一整套微创手术器械,包括手术刀、镊子、剪子、针持器、稳定夹等,可以实施多种机器人微创外科手术[8].美国密歇根州立大学科研人员提出一种齿轮链传动方式的微创手术器械AMMIS,器械整体弯曲范围达到±180°,具有较大的运动空间和较高的灵活度;其不足是对齿轮及齿轮架制造精度要求过高,传动结构对灰尘较敏感[9].天津大学研制了应用于“妙手A”系统的系列化手术器械,可以实现微创手术切开、剥离、止血、缝合等操作,采用钢丝进行动力传递,其研制的手术器械已经在动物试验中进行了应用[10-11].哈尔滨工业大学机器人研究所研制了一种采用单元关节配置的微创手术器械,通过为腕部机构配置不同数目的单元关节,来满足不同器械对腕部自由度及运动范围的不同要求[12-13].
本文针对微创手术器械采用钢丝传动而存在的耦合运动问题,提出一种在腕部传动轴中心打孔走线的微创手术器械设计方法,研制出无耦合运动的微创手术器械,并开展微创手术器械的主从控制方法研究.通过耦合运动测试及主从控制实验,验证微创手术器械设计方法及主从控制方法的有效性.
1 耦合运动分析
手术器械是微创手术机器人进行手术操作的执行部分,其性能直接影响到机器人微创手术的质量和效率.器械一般具有3或4个自由度,以最具代表性的组织钳进行分析,其具有4个自由度,采用钢丝实现动力的传递.组织钳末端一般采用如图1所示的结构,主要由左指、右指、腕部、腕杆连接件、导向轮等构成.组织钳可实现操作杆旋转、腕部旋转、左指旋转和右指旋转4个动作.两个手指运动相互独立,其相对运动实现夹持操作,同向运动实现偏摆操作.在运动分析中发现,当腕部进行俯仰运动时会导致器械末端手指运动,这种耦合运动在实际应用中会带来诸多不便.
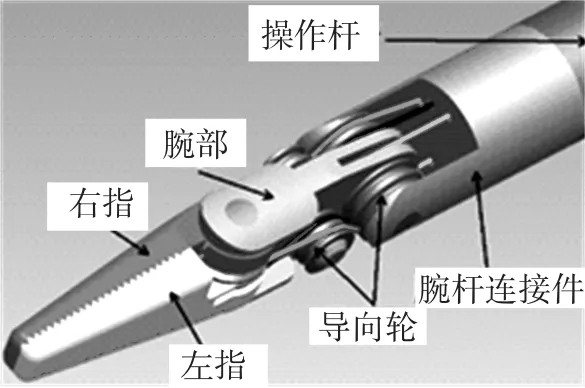
图1 组织钳末端结构
简化组织钳模型如图2所示,当牵引手指的钢丝保持不动时,令器械的腕部做俯仰运动,牵引手指钢丝与腕部导向轮间的包角θ发生改变.钢丝与手指固定,由于钢丝保持不动,故包角的增加会引起手指的转动.因此,腕部的运动会引起手指的运动,这种耦合运动在手术中会影响到医生手术操作的精度.
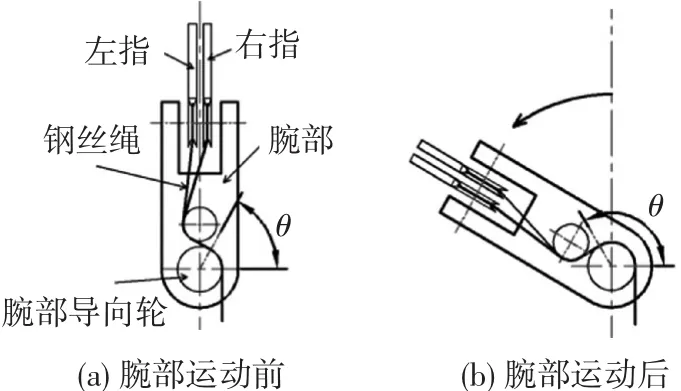
图2 腕部运动引起的耦合运动
为使医生在操作腕部运动过程中保持手指的稳定,需要消除上述耦合运动.目前,主要的解耦方法为控制软件解耦及机械结构解耦.控制软件解耦的原理为:腕部电机运动时,手指电机根据耦合情况而运动,从而补偿手指传动钢丝因腕部运动而产生的有效长度变化[14].控制软件解耦对传动结构间隙、加工装配精度要求较高,且受驱动电机回差及控制系统时延等因素影响较大.因此,手指电机的实际补偿量不易控制,会导致腕部运动过程中手指发生一定量的运动.基于行星轮系传动原理的机械解耦方法为:腕部电机的运动能够经过行星轮系传递到手指上,从而对手指因腕部运动而产生的耦合运动进行补偿[15-16];当腕部不运动时,手指电机单独通过行星轮系驱动手指运动.在实际应用中,行星轮系机械解耦方法对行星架、齿轮及相关轴孔的加工、装配精度要求较高,任何精度上的缺陷都会影响解耦效果.采用行星轮系传动会增加传动链中的负载,加大钢丝传动时所承载的拉力.
为去除手术器械的耦合运动,提高手术器械的操作性能,在分析耦合运动产生的基础上,提出一种在腕部传动轴中心打孔走线的微创手术器械设计方法.
2 无耦合运动手术器械设计
2.1 手术器械设计要求
为使手术器械在狭小的工作空间内完成一系列的手术动作,要求所设计的手术器械不仅需具有较大的灵活性,而且还应具有较高的运动精度.为减少患者创伤,器械操作杆直径不大于10 mm,且器械要保持足够大的夹持力来实现操作任务.手术器械需具有快速更换功能,以便在术中更换不同种类的器械来完成微创手术.手术器械需具有使用情况记录功能,严格限制器械的使用次数,保障器械使用的安全性、可靠性.手术器械的材料应满足医学要求,且消毒、清洗方便.
2.2 无耦合运动手术器械结构设计
依据手术器械结构特点,将器械结构划分为末端执行器、操作杆和传动箱3个部分,如图3所示.末端执行器在微创手术中与组织直接接触,进行相关的手术操作.操作杆为连接传动箱与末端执行器的构件,传动钢丝经其内部通过,将传动箱内的运动传递给末端执行器.传动箱将电机的旋转运动传递给钢丝,为末端执行器的运动提供动力.传动箱内部设计有动力离合装置,可实现手术器械与电机驱动单元间的快速离合.传动箱设计有电气接口实现与机器人系统间的数据通信.
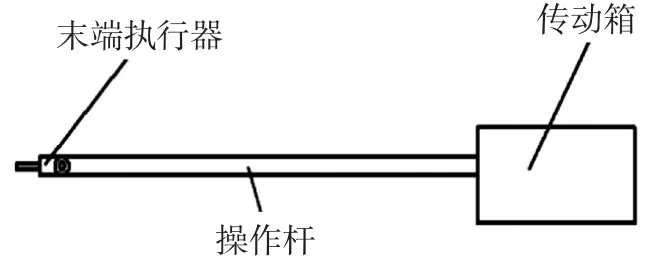
图3 手术器械总体结构
传动箱结构如图4所示,4个传动轮组分别与操作杆、腕部、左指、右指相连接,传动轮组上的钢丝预紧轮用于钢丝预紧,传动轮1的两段钢丝与操作杆端部连接,驱动操作杆旋转.其余传动轮组的钢丝经过6个导向轮导向后,穿过操作杆与对应的零件连接.
手术器械末端执行器结构如图5所示,传动轮2固连的两段钢丝与腕部相连接,实现手术器械末端执行器的俯仰运动.为了消除器械运动过程中腕部和手指之间的耦合运动,将腕部传动轴与钢丝交涉部分设计为半圆柱形结构,并在其剩下的半圆柱截面上打通孔,使传动轮3、传动轮4固接的钢丝通过对应的通孔及相应的导向轮与两个手指连接.从图6中可知手指传动钢丝的长度A—B—C—D—E在腕部俯仰运动前和运动后保持不变,消除了手术器械的耦合运动.
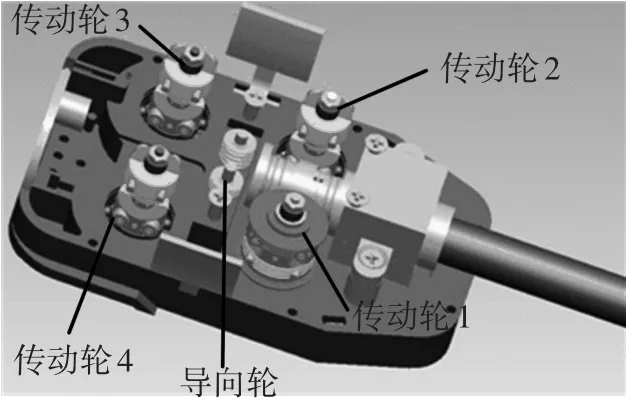
图4 手术器械传动箱模型

图5 手术器械末端执行器模型
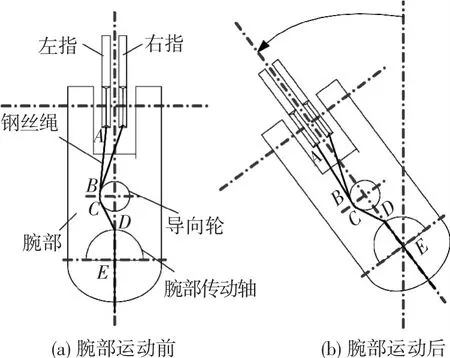
图6 无耦合运动末端执行器简图
2.3 无耦合运动手术器械功能设计
机械臂驱动单元上的上离合盘设计有两个非对称的定位孔,手术器械传动箱外侧的下离合盘设计有两个非对称的定位柱,如图7所示.将手术器械通过传动箱两边的凸缘和驱动单元的滑槽相配合后,就将4个上离合盘下压.当电机带动上离合盘旋转至上下离合盘配合位置时,弹簧推动上离合盘弹起,定位孔与定位柱相配合,上离合盘带动下离合盘一起转动,实现电机动力的传递.当要更换手术器械时,只需捏住手术器械传动箱两边的夹块,使手术器械驱动单元上的浮动盘向下运动,带动上离合盘回缩,进而使上下离合盘分离,将手术器械从驱动单元中拆卸下来.
为了实现器械的使用信息记录功能,记忆芯片采用AT24C1024,能掉电记忆,工作电压2.7~5.5 V,内存有1 024 kB,可允许10万次读写操作.由于器械驱动单元与器械接口采用按压式的接口设计,因此器械记忆芯片的电气触点采用可按压的弹簧触点,既保证接触良好,又使器械容易更换.记忆芯片通过I2C总线和STC89C52芯片进行通信.当器械安装到驱动单元上时,器械弹簧触点信号接通,STC89C52芯片上电读取记忆芯片的使用次数,并判断使用次数是否达到上限值,达到上限值则通过串口发送报警信息.如果没有达到上限值,则将使用次数增加1次后,将数据写入记忆芯片.
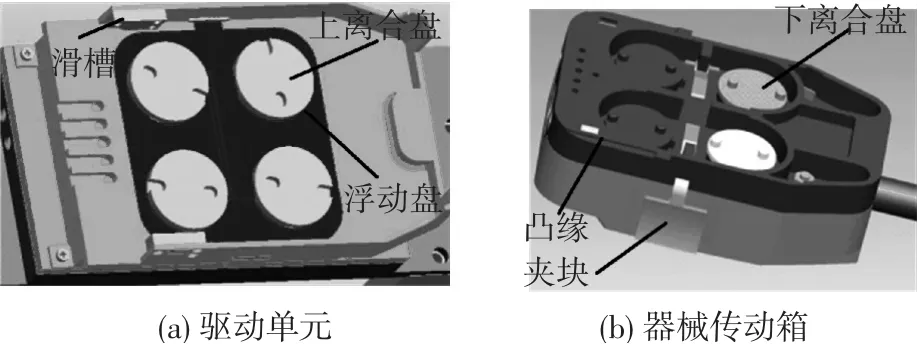
图7 手术器械接口模型
2.4 无耦合手术器械实现
研制的无耦合运动手术器械如图8所示.手术端盖上设计有小孔,可以插入电凝的导线和吹孔的导管,进行电凝手术操作或清洁器械末端的工作.
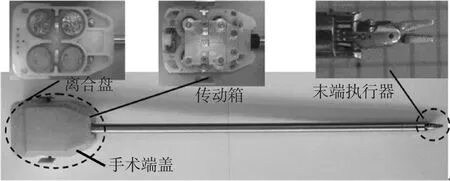
图8 无耦合运动手术器械图片
3 主从控制方法
3.1 手术器械运动学求解
研制的无耦合运动手术器械具有4个自由度,因为开合自由度由主手手柄上的夹持机构直接进行关节量控制,因此可将手术器械简化为三自由度模型.采用D-H方法分析手术器械的正运动学,如图9所示.手术器械连杆参数及关节变量如表1所示.将θ的正弦、余弦简化表示:si= sinθi,ci=cosθi,最终得到器械末端点的齐次变换矩阵:
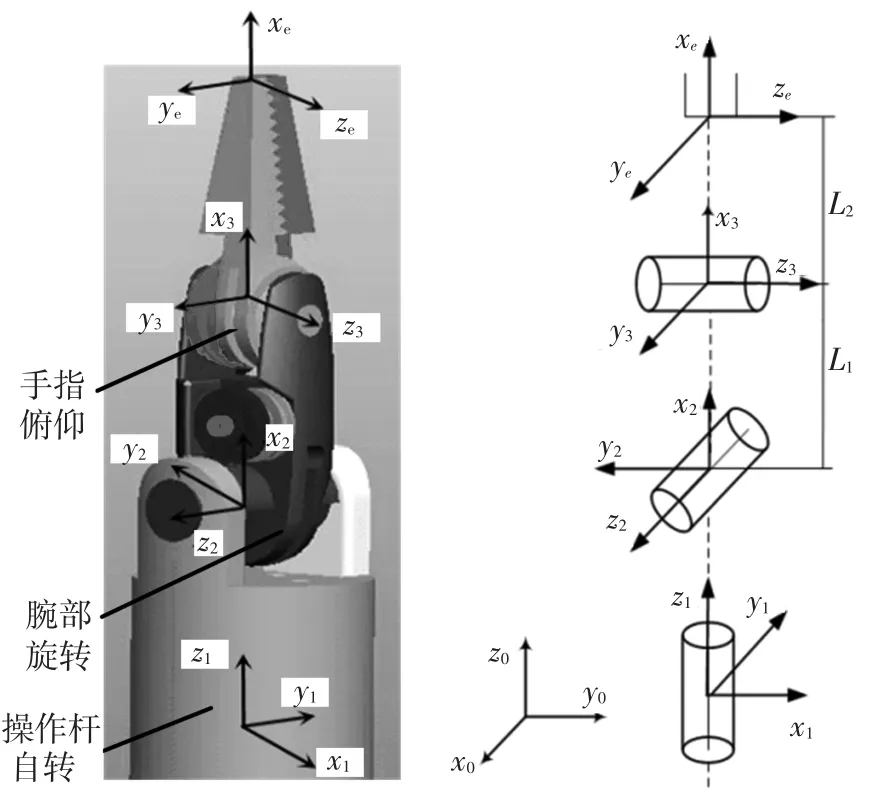
图9 手术器械参考坐标系

式中:Te为器械末端点的齐次变换矩阵,T为器械各关节的齐次变换矩阵,Ps表示器械末端点的位置矢量,ns、os、as分别为器械末端点处相互垂直的单位向量.
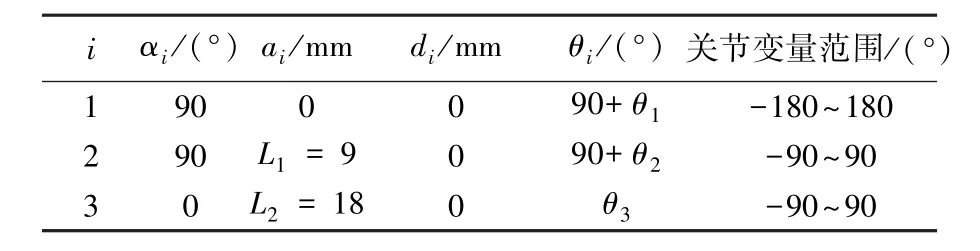
表1 手术器械运动学参数表
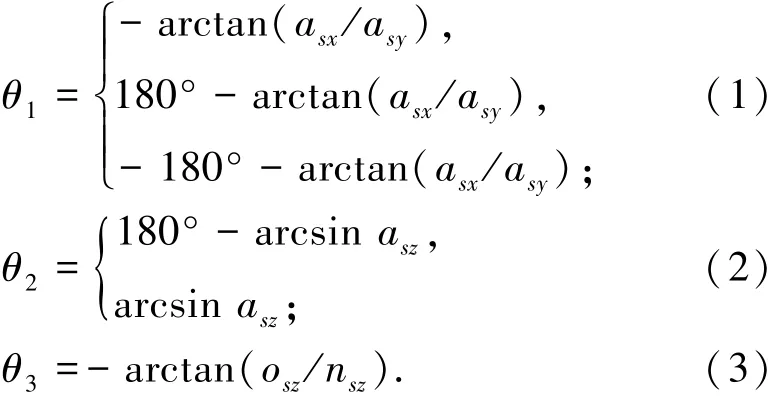
最终得到手术器械的运动学逆解为
3.2 主手运动学求解
主手采用Force Dimension公司的omega 7.0设备,其末端3个旋转关节的轴线交于一点,主手手柄上有专用的夹持机构实现对器械开合自由度的控制.在手术器械的控制中,为使器械运动能够跟随医生手部的动作,要求器械末端手指的姿态要和主手手柄的姿态保持一致,如图10所示.分析主手正运动学得到主手手柄的姿态矩阵:
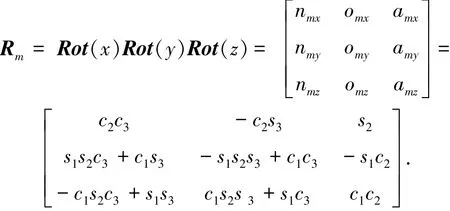
式中:Rm为主手手柄的姿态矩阵,Rot为绕坐标轴旋转的旋转矩阵,nm,om,am分别为主手手柄处相互垂直的单位向量.
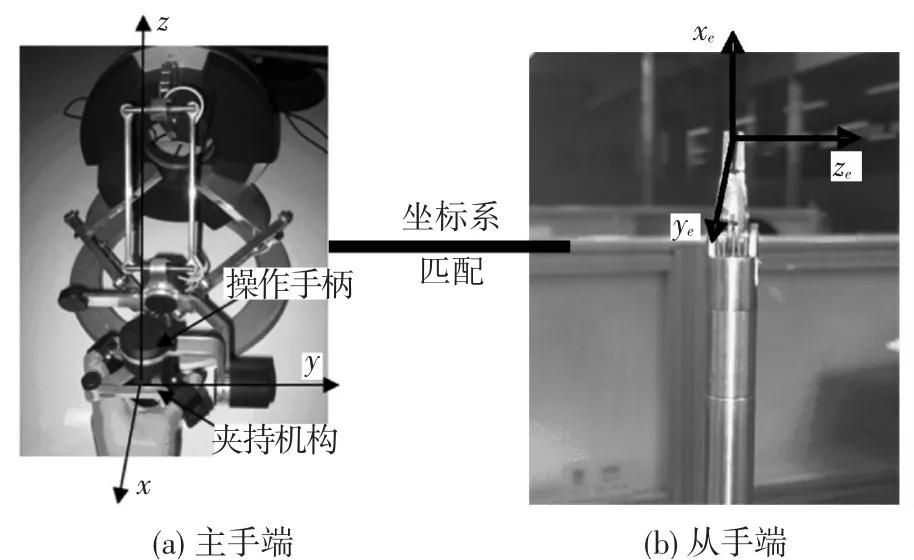
图10 主手设备及自由度图示
为方便医生操作主手完成对器械末端的控制,可将主手手柄类比为器械末端的手指,器械末端手指的姿态时刻跟随主手手柄的姿态,从而完成对器械末端的主从控制.由于固连在器械手指和主手手柄上的坐标系不一致,为实现上述控制方法,需要对两个坐标系进行匹配,得到以下的对应关系:

这样就可获得器械末端手指的姿态,再利用式(1)~(3)得到手术器械每个关节的运动角度,进而控制电机实现器械手指对主手手柄姿态的跟随.
4 实验研究
4.1 器械耦合运动测试
借助NDI公司的Optotrak Certus三维运动测量系统对手术器械耦合运动进行测试,将3个Marker点分别粘附到器械的腕部及两个手指上,如图11(a)所示.当控制器械腕部单独运动时,记录3个Marker点的空间位置.如果3个Marker点的空间位置相对不变,说明器械手指相对于腕部没有产生耦合运动.实验结果如图11(b)、(c)、(d)、(e)所示,横坐标n为Optotrak Certus系统在实验过程中接收到Marker点空间坐标变化数据量,纵坐标d1、d2、d3为3个Marker点间的距离.在器械腕部单独运动过程中3个Marker点之间的距离d1、d2、d3变化很小,考虑到器械加工、装配误差及腕部运动过程中3个Marker点同Optotrak Certus系统摄像机之间映射角度变化而导致d1、d2、d3数值的变化,可认为器械腕部与两个手指之间位置相对不变,器械在腕部运动过程中是无耦合运动产生的.
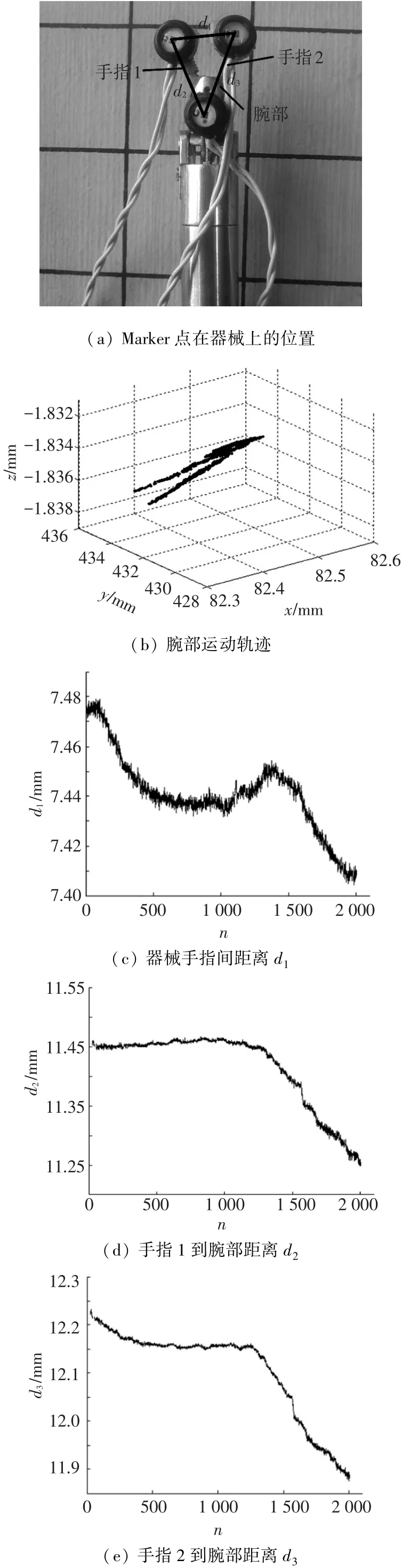
图11 器械耦合运动测试结果
4.2 主从控制实验
为验证手术器械性能,构建了主从控制平台. PC104用于上位机控制,采用CAN总线实现上位机与各驱动器间的通信,手术器械安装在驱动单元上,驱动单元上的4个电机通过钢丝传动方式来驱动器械4个自由度运动,操作者通过操作主手来控制手术器械运动.实验中将主手手柄当前姿态通过式(4)转换为器械末端手指的姿态,再利用式(1)~(3)得到手术器械末端各关节所需的运动角度,驱动电机使器械末端各关节到达相应的运动角度后,实现了对主手手柄姿态的跟随.由于所设计的手术器械不存在耦合运动,因此不需要补偿由器械腕部运动而引起手指的运动.
5 结 论
1)在分析微创手术器械耦合运动产生原理的基础上,提出了一种在腕部传动轴中心打孔走线的微创手术器械设计方法,最终研制出一种无耦合运动的微创手术器械.
2)研制的无耦合运动手术器械可实现术中快速更换,具有使用信息记录功能,增加了手术器械在机器人微创手术中的适应性和安全性.
3)在求解器械和主手运动学的基础上,给出了手术器械的主从控制方法,该方法可以使医生更易于对器械进行主从式操作.
4)构建了手术器械主从控制平台,开展了手术器械耦合运动测试及主从控制实验研究,结果表明了所研制的手术器械消除了耦合运动,具有较好的主从操作性能.
[1]TAYLOR R H,STOIANOVICI D.Medical robotics in computer-integrated surgery[J].IEEE Transactions on Robotics and Automation,2003,19(5):765-781.
[2]杜志江,孙立宁,富历新.外科手术机器人技术发展现状及关键技术分析[J].哈尔滨工业大学学报,2003,35(7):773-777.
[3]SIM H G,YIP S K,CHENG C W.Equipment and technology in surgical robotics[J].World Journal of Urology,2006,24(2):128-135.
[4]杜志江,孙立宁,富历新.医疗机器人发展概况综述[J].机器人,2003,25(2):182-187.
[5]BROEDERS I,RUURDA J.Robotics revolutionizing surgery:the intuitive surgical“Da Vinci”system[J]. Industrial Robot,2001,28(5):387-391.
[6]GULATIS,JUNG E H,KAPOOR C.Execution engine for robotic surgery support functions in an unmanned operating room[C]//IEEE International Conference on Robotics and Automation.Jacksonville:IEEE,2007: 404-409.
[7]NOONAN D P,MYLONASG P,DARZIA,etal.Gaze contingent articulated robot control for robot assisted minimally invasive surgery[C]//IEEE/RSJ International Conference on Intelligent Robotics and Systems.Nice:IEEE,2008:1186-1191.
[8]GRACE K.Suturing articulating device for tissue and needle manipulation during minimally invasive endoscopic procedure:Worldpatent,WO 00/59384 A1[P].2001-11-05.http://apps.webofknowledge.com.
[9]MINOR M,MUKHERJEE R.A dexterous manipulator for minimum invasive surgery[C]//IEEE International Conference on Robotics and Automation.Detroit:IEEE,1999:2057-2064.
[10]王树新,王晓菲,张建勋,等.辅助腹腔微创手术的新型机器人“妙手A”[J].机器人技术与应用,2011(4):17-21.
[11]SANG Hongqiang,WANG Shuxin,LI Jianmin,et al. Control design and implementation of a novel masterslave surgery robot system,MicroHand A[J].The International Journal of Medical Robotics and Computer Assisted Surgery,2011(7):334-347.
[12]MA Ruqi,WU Dongmei,YAN Zhiyuan,et al.Research and development of micro-instrument for laparoscopic minimally invasive surgical robotic system[C]//IEEE International Conference on Robotics and Biomimetics. Tianjin:IEEE,2010:1223-1228.
[13]马如奇.微创外科手术机器人执行系统研制及其控制策略研究[D].哈尔滨:哈尔滨工业大学,2013: 28-31.
[14]SANG Hongqiang,MENG Jianjun,YUN Jintian. Kinematic analysis of a class of multi-DOF tendondriven minimally invasive surgical instruments[C]//IEEE International Conference on Computer Science and Network Technology.Harbin:IEEE,2011:607-612.
[15]赵旭东.腹腔微创手术机器人手术器械的结构设计[D].哈尔滨:哈尔滨工业大学,2010:17-21.
[16]FENG Mei,FU Yili,PAN Bo,et al.An improved surgical instrumentwithout coupled motions that can be used in robotic-assisted minimally invasive surgery[J]. Proceedings of the Institution of Mechanical Engineers Part H-Journal of Engineering in Medicine,2012,226(H8):623-630.
(编辑杨 波)
Design and experiment of surgical instrument w ithout coupled motions for m inimally invasive surgery
PAN Bo1,2,FU Yili1,QIU Xueqin1,XU Dianguo2
(1.State Key Laboratory of Robotics and System,Harbin Institute of Technology,150080 Harbin,China;2.School of Electrical Engineering and Automation,Harbin Institute of Technology,150001 Harbin,China)
To increase the operation dexterity of surgical instruments in minimally invasive surgery(MIS),and improve manipulation performance ofmaster-slave control,a novel surgical instrument without coupled motions used in MIS is designed.On the basis of analyzing the formation principle of coupled motions and existingmethods of coupled motions elimination,a design method that steel wire crosses the centre of wrist shaft in the radial direction for surgical instrument used in MIS is proposed.The developed instrumenthas four DOFs and is driven by means of steel wire.Besides that,the instrument can realize quick replacement and useful information record aswell.After researching kinematics of surgical instrument and master,master-slave control method for surgical instrument is proposed and experiments platform for master-slave control is established.The experimental results indicate that the position of instrument′s wrist in relation to two fingers remains unchanged in the process of surgical instrument's wristmoving individually,which means that the developed surgical instrument eliminates coupled motions and has good manipulation performance in masterslave control.The design method that steel wire crosses the centre of wrist shaft in the radial direction for surgical instrument used in MIS can eliminate coupled motions,and the developed surgical instrument is beneficial to surgical operation in MIS.
minimally invasive surgery;robot;control;instrument;coupled motions
TP241
A
0367-6234(2014)09-0019-06
2013-10-24.
国家高技术研究发展计划资助项目(2012AA041601);中央高校基本科研业务费专项资助(HIT.NSRIF.2013052).
潘 博(1981—),男,讲师;付宜利(1966—),男,教授,博士生导师;徐殿国(1960—),男,教授,博士生导师.
潘 博,panbo4034@163.com.
猜你喜欢
中老年保健(2021年5期)2021-08-24 07:07:36
中老年保健(2021年6期)2021-08-24 06:55:28
中老年保健(2021年7期)2021-08-22 07:42:30
世界最新医学信息文摘(2021年12期)2021-06-09 08:37:52
上海医学(2019年1期)2019-04-13 05:56:20
制造技术与机床(2017年6期)2018-01-19 02:41:22
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:55
中国卫生质量管理(2014年5期)2014-02-28 17:42:26
