基于模糊理论的汽车远程故障诊断*
2014-06-22 09:24:26张宏
汽车工程师 2014年5期
张宏
(武汉理工大学华夏学院)
现代汽车电控系统及其故障越来越复杂,汽车系统故障又总是通过各种现象表现出来[1],因此故障原因与故障现象之间通常没有对应关系,一种故障原因可能会产生多种故障现象,一种故障现象可能有多种原因[2]。在汽车故障诊断中,存在界限不分明的模糊概念(如发动机温度“偏高”、轮胎磨损“较严重”等具有模糊性),运用模糊理论的诊断方法将更为有效[3]。模糊诊断的实质是引入隶属函数概念,模糊逻辑以其较强的结构性知识表达能力[4-5],适合处理诊断中的不确定和不完整信息。因此,应用模糊理论解决此问题往往具有优越性[6]。文章采用层次分析法(AHP),利用专家知识建立模糊诊断矩阵,得到比较符合实际的故障原因和故障征兆判断矩阵。
1 汽车远程故障模糊诊断思路
在汽车远程故障诊断过程中采用正向推理,首先确定故障征兆向量X,进行模糊运算,得到故障原因向量Y,进行阈值诊断,确定远程汽车故障的原因,并迅速通过3G 或GPRS 网络通知驾驶员故障原因,提供诊断技术支持。
2 汽车远程故障诊断判定过程
2.1 汽车模糊故障诊断的数学表达
利用模糊集合论中的隶属度函数和模糊关系矩阵来描述故障征兆与故障原因之间的关系,为诊断远程汽车故障与提供维修方法提供科学的依据。
设有2 个论域,用因素集U 代表故障征兆论域,评判集V 代表故障原因论域,通过故障征兆隶属度推导出故障原因隶属度。设某诊断对象有n 种可能发生的故障原因,表示为y1,y2,…,yn,由这些故障原因引起m 种故障征兆,可表示为x1,x2,…,xm。
因此,故障原因模糊向量为:
故障征兆模糊向量为:
式中:yi——故障原因的隶属度,i=1,2,…,n;
xj——故障征兆的隶属度,j=1,2,…,m。
汽车技术状况具有渐发性和偶发性,渐发性变化规律表明:汽车技术状况随汽车使用时间或汽车行驶里程呈单调变化,可用n 项多项式或幂函数描述。在此过程中,汽车既不是完全完好,也不是完全故障,而是处于中间某状态,所表现出来的征兆亦如此。通过语义描述来确定故障征兆隶属度,将远程驾驶员定性描述定量化,结果如表1 所示。

表1 汽车远程故障征兆隶属度取值表
例如,某远程汽车出现的故障现象为:有刺鼻的焦糊味,发动机声音轻微异常,方向盘未出现抖动,根据驾驶员描述,量化驾驶员的模糊回答,依据表1,得到故障征兆向量为(0.9,0.2,0)。
2.2 构建单因素评判矩阵
由专家首先确定初始隶属度,针对故障征兆xj将n 种故障原因两两对比,根据隶属度取值原则,结合专家经验,把两两对比原因中最容易引起故障征兆的那一种隶属度赋值大一些,参照Satty 九标度法,按定义的比例标度对故障原因进行赋值,采用几何平均值对赋予的标度值进行均值修正,构造判断矩阵,求出最大特征值对应的特征向量。
2.2.1 计算相对权重和一致性检验
利用判断矩阵计算各指标相对权重系数(Wi)和矩阵特征根(λmax),方法如下:
1)计算汽车某一判断矩阵B 中每行所有元素的积:
式中:aij——B 中的元素,i=1,2,…,n;
表3给出了在不同优化目标下的优化结果。表3中,单目标优化是指仅以最小化购电成本或功率波动为目标的粒子群算法后的优化结果;多目标优化是指先将某一个目标作为主要的优化对象,再将另一个优化目标作为约束条件添加到原问题的约束集中得到的计算结果;二人零和博弈是指利用本文所述的二人零和博弈模型,确定各目标的权重系数,再应用布谷鸟搜索算法得到的优化结果。
n——矩阵阶数。
2)对Mi开n 次方
式中:W——特征向量。
2.2.2 层次单排序和一致性检验
为确定构造的判断矩阵是否合适,要进行一致性检验,其方法是:
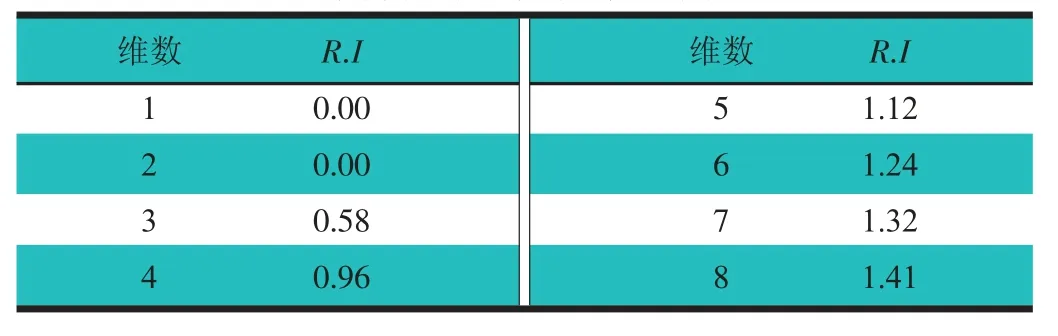
表2 判断矩阵的平均随机一致性指标
将特征向量归一化后得到模糊隶属度,从而构造出模糊关系矩阵(R)。R 的一般表达式为:
式中:rij——第i 个故障征兆被确定为评判集Vj(j=1,2,…,n)的隶属度,指标i 的隶属度向量为R(i)=[ri1ri2…rin]。
2.3 综合评判
文章模糊合成算子“·”采用乘法和上限为1(要求归一化)的求和运算,即加权平均值,得到最后的故障原因模糊向量,确定故障原因。经过模糊运算后,得到故障原因模糊向量Y=(y1,y2,…,yn)。
规定一个阈值水平γ∈[0,1],记O=max(y1,y2,…,yn),若O>γ,认为诊断结果可行;反之则说明提供的征兆向量不足,需补充信息之后再重新诊断。γ 主要由专家确定,并根据实际情况进行实时调整以提高诊断精度。
3 典型故障实例分析
以汽车发动机不能启动为例,进行故障诊断。
3.1 故障征兆与故障原因
故障征兆:发动机动力不足(x1),机油温度低(x2),无火花(x3),燃料不足(x4),气缸压缩压力低(x5)。
故障原因:冷却系统故障(y1),燃油供给系统故障(y2),点火系统故障(y3),启动系故障(y4),润滑系统故障(y5),配气机构故障(y6)。
3.2 构造模糊关系矩阵
以故障征兆x1为例,构建发动机动力不足的故障原因判断矩阵,并进行单一准则下因素的相对权重和一致性检验计算,如表3 所示。
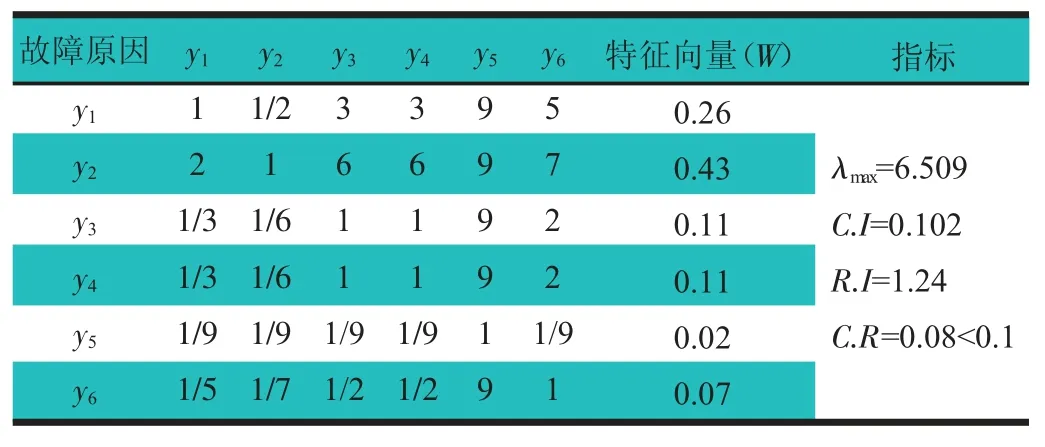
表3 发动机动力不足的故障原因判断矩阵
依据上述方法,根据汽车的实际运行技术参数、经验资料及专家经验,确定每一故障征兆xj分别对每个原因yi的隶属度,得到模糊关系矩阵,如表4 所示。
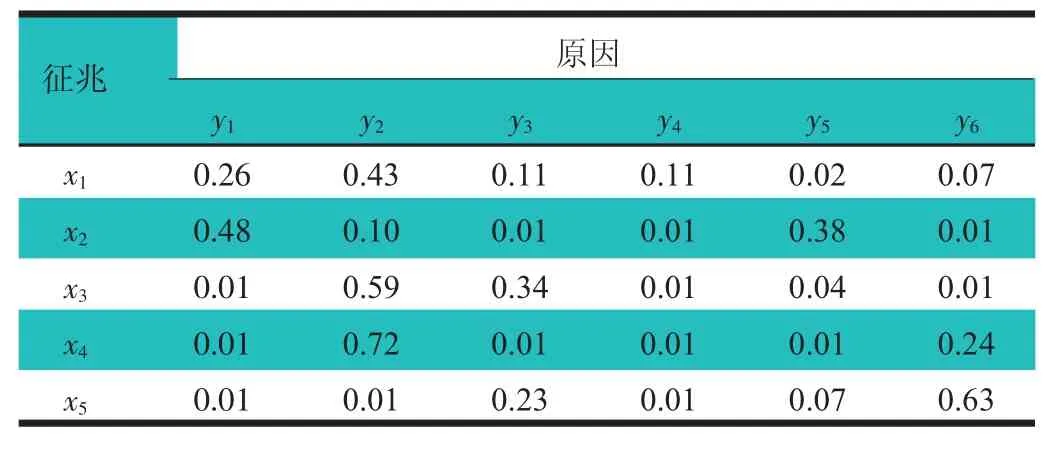
表4 汽车远程故障诊断模糊矩阵
汽车发动机不能启动时,发生某种故障现象,例如,无火花和压缩压力低,即有x3和x52 种故障现象,根据确定故障征兆向量的方法可知:此时故障征兆向量取X=(0 0 0.6 0 0.85),运用模糊运算可得故障原因向量。
第1 可能的故障为y6,接下来可能的故障为y3和y2,设γ=0.5,因为y6=0.54>0.5,故障原因为配气机构故障。经检修,验证了诊断正确。y3和y2在故障原因向量中所占数值也较大,可能是故障系统之间相互影响及相互作用的结果,有待于进一步深入研究。
4 结论
从诊断方法的原理和实例可以看出,使用AHP法,利用专家知识建立模糊诊断矩阵,得到比较符合实际的故障原因和故障征兆判断矩阵。该方法简单易行,不需要建立精确的数学模型等。
故障征兆与故障原因并非一一对应,使得模糊矩阵的分析变得困难,诊断规则采用唯一诊断γ 的精度不高,需进行改进。
确定隶属集的隶属函数的方法是多样的,但这些方法所给出的隶属函数只是近似的,因此需要在实践中不断总结加以修改,使之逐步完善。
猜你喜欢
防爆电机(2022年4期)2022-08-17 06:00:14
小星星·阅读100分(高年级)(2016年5期)2016-05-14 17:34:20
小星星·阅读100分(高年级)(2016年4期)2016-04-28 04:36:11
汽车维护与修理(2016年3期)2016-02-28 13:17:03
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
汽车维护与修理(2015年6期)2015-02-28 12:17:12
汽车维护与修理(2015年3期)2015-02-28 12:16:02
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48