关于电容阵列仪应用的问题及两点注记
2014-06-19 17:13董勇油气资源与勘探技术教育部重点实验室长江大学湖北武汉430100
石油天然气学报 2014年2期
董勇 油气资源与勘探技术教育部重点实验室 (长江大学),湖北 武汉 430100
长江大学信息与数学学院,湖北 荆州 434023
郭海敏 (油气资源与勘探技术教育部重点实验室 (长江大学),湖北 武汉 430100)
李梦霞 (长江大学信息与数学学院,湖北 荆州 434023)
时新磊 (中海油天津分公司渤海油田勘探开发研究院,天津 300452)
关于电容阵列仪应用的问题及两点注记
董勇 油气资源与勘探技术教育部重点实验室 (长江大学),湖北 武汉 430100
长江大学信息与数学学院,湖北 荆州 434023
郭海敏 (油气资源与勘探技术教育部重点实验室 (长江大学),湖北 武汉 430100)
李梦霞 (长江大学信息与数学学院,湖北 荆州 434023)
时新磊 (中海油天津分公司渤海油田勘探开发研究院,天津 300452)
针对电容阵列仪(capacitance array tool,简称CAT)在水平井多相流监测中暴露的不足,即CATView软件成像失真和油水两相流时有时漏失油相信号,首先分析了产生不足的原因,一是已有的成像算法没有充分考虑流型的特点,二是测量方式没有考虑仪器的结构特点;然后指出了流动成像算法的改进思路,提出在实际使用CAT时应添加扶正器。
电容阵列仪;多相流动;成像算法;生产测井
电容阵列仪(capacitance array tool,简称CAT)具有12个微型电容探头,每个探头能够准确探测其周围流体的相持率/属性值(其探测距离大约是0.3mm)[1]。测量时12个探头在井筒同一横截面上径向分布,如图1所示,对水平井中的多相流具有较好的测量反映能力。但是,该仪器在流动试验中暴露出了一些需要注意的问题:CATView软件回放失真,油水两相流情形下有时漏失油相信号。为此,笔者详细分析了问题的产生原因,指出了使用CAT的两点注记。
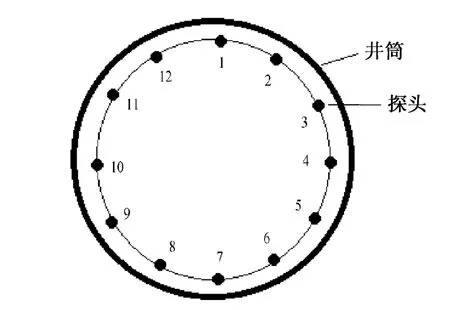
图1 CAT探头及其在井筒中的分布
1 主要问题
笔者所在的实验室曾进行过水平井三相流动模拟测量研究,在井筒中放入生产测井仪器串,进行实际测量模拟。对油水两相流动CAT测量资料,利用CATView软件回放的结果并不总能准确反映水平管中的流动状态,如图2所示。后来又进行了水平管及近水平管油水两相流流动试验。在井管内直接放入CAT,仪器静止在井筒中,但部分情形下,尤其是上坡流时,仪器没有测得油相信号。

图2 CATView软件回放失真
2 原因分析
2.1 CATView软件回放不准确的原因
____CATView软件回放的本质就是进行可视化显示,其基础是对某深度点的测量数据进行成像,其目的是为了直观地显示井筒内的流动状态。成像与实际是否相符关键在于从实测数据产生图像的成像算法是否合理。所以CATView软件回放不准确的原因是成像算法不合理。但CATView软件的成像算法没有披露出来,无从分析其算法的合理性。未见讨论CAT数据成像算法的外文文献,中文文献只有文献[2]、[3],文献[2]中算法的不足在文献[3]中已有说明。文献[3]中的算法对三相流模拟试验数据显示出了较好的成像效果。分析认为,开发合理的成像算法必须充分考虑多相流流型的特点[4,5]。
2.2 油相信号漏失的原因
油相信号漏失的直接原因是电容探头在整个试验过程中都没有接触到油相。经仔细分析发现其本质原因有二:一是因为仪器本身的机械结构;二是因为井身轨迹导致的上坡流的相态分布特点。
仪器的机械结构如图3所示,探头和弓形弹簧都安装在同一个环形结构上,这样12个弓形弹簧是联动关系,当一个弹簧臂受挤压而弯曲程度减弱时,其余弹簧臂因联动也会出现弯曲度减弱;或者说一个弹簧臂受挤压将导致弹簧臂的张开程度变小,进而探头径向分布的半径会变小,12个探头所在的圆的半径会变小。再考虑到仪器的偏心,将出现如图4所示的探头分布状态 (仪器旋转角度为0°),此时,在CAT的1号探头上方将出现较大的测量盲区。
图5给出了水平管及近水平管油水两相流流动试验的部分结果,结果表明,上坡流 (图5中井斜角度85、87、89°)时,因重力分异导致油相的持率严重偏小,管子截面上油相仅占据了截面上部的极小区域。实际水平井的井身轨迹不可能是完全水平的,其水平段井斜角度一般在85~95°之间变化,必然出现上坡流。结合图4中所示的测量盲区的概念可知,当油相从盲区经过时,探头不会有响应,于是出现了油相信号丢失。

图3 CAT的机械结构 图4 CAT受挤压偏心测量示意图
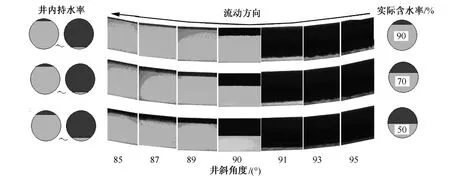
图5 油水两相流动试验图片对比(总流量30m3/d)
3 两点注记
1)应开发基于流
型划分的成像算法,因为合理的成像算法应该是基于流型划分的,所以首先需要进一步弄清多相流流型的划分,提高流型预测方法的准确度和适应性。
2)现场实测时,在CAT的两端串联扶正器,这样一方面可改善仪器的偏心程度,另一方面可防止弹簧臂受挤压的情况,改善探头分布圆半径缩小导致测量盲区过大的状况。
[1]Frisch G,Perkins T,Quirein J.Integrating wellbore flow images with a conventional production log interpretation method[J]. SPE77782,2002.
[2]戴家才,郭海敏,刘恒,等.电容阵列仪测井资料流动成像算法研究[J].测井技术,2010,34(1):27~30.
[3]董勇,郭海敏,李梦霞.基于改进高斯权重的多相流动成像算法[J].测井技术,2013,37(1):35~38.
[4]Trallero J L,Sarica C,Brill J P.A study of oil-water flow pattern in horizontal pipes[J],SPE Production&Facilities,1996,12 (3):165~172.
[5]刘军锋,郭海敏,王界益.水平管油水两相流持率仪响应特征试验研究[J].石油天然气学报(江汉石油学院学报),2010,32 (1):88~91.
[编辑]龚丹
P631.84
A
1000-9752(2014)02-0084-03
2013-06-27
国家科技重大专项(2008ZX05020-005);国家自然科学基金项目(61273179);湖北省教育厅重点项目(D20101304);
湖北省教育厅科学技术项目(Q20121216)。
董勇(1980-),男,2002年大学毕业,博士,讲师,现主要从事生产测井资料的解释与研究、智能优化算法的研究。
猜你喜欢
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
新高考·高一物理(2016年10期)2017-07-07
中南大学学报(自然科学版)(2016年2期)2017-01-19
黑龙江科学(2016年1期)2016-03-15
西安石油大学学报(自然科学版)(2015年4期)2015-12-16
质量与标准化(2015年12期)2015-07-10
环球时报(2015-03-18)2015-03-18
人间(2015年21期)2015-03-11
河南科技(2014年18期)2014-02-27