
简易船舶GPS、艏向显示器的设计
2014-06-13 07:54:24陈隐宏楼然苗
浙江海洋大学学报(自然科学版) 2014年6期
陈隐宏, 楼然苗
(浙江海洋学院船舶与海洋工程学院, 浙江舟山, 316022)
船舶航行时的艏向、航速、地理位置(经度、纬度等)、时间等是船舶安全航行的必要信息。目前市场上,一套进口的罗经导航设备多达数十万元,只有大型船舶上才配有这样的装备。而设计一套简易的GPS、电子罗经导航仪价格在1 000元以下,具有实时的艏向、航速、地理位置(经度、纬度)、时间等信息显示功能,可在小型渔货轮船上大量推广应用,为船舶安全航行提供辅助帮助[1-10]。
1 硬件电路设计
简易船舶GPS、艏向显示器的硬件原理框图如图1所示。整个系统由主控制器、电子罗经传感器、GPS模块、4.3寸TFT液晶显示屏、电源稳压模块组成。
1.1 电子罗经传感器硬件系统组成
电子罗经传感器硬件系统框图如图2所示。电子罗经传感器由微处理器芯片、LSM303DLH地磁传感器芯片、RS485接口电路、三位LED数码管和电源变换器组成。
1.1.1 微处理器电路
电子罗经传感器的微处理器芯片使用宏晶公司生产的STC12LE5608AD单片机,采用32脚的方形贴片封装形式(LQFP-32)。主要引脚资源使用如图3,分别为:P1.0-P1.6口用于输出LED数码管的段码;P2.0、P0.2、P3.7口用于三位LED数码管的位选;串行口P3.1、P3.2与RS485接口电路相连,用于输出航向角信息;P2.5、P2.6、P2.7口与地磁传感器LSM303DLH的相应端口连接,P3.4、P3.5口分别接一个按键开关,用于功能设定与校正;P0.0口用于RS485芯片的使能控制。
1.1.2 地磁传感器芯片
地磁传感器芯片使用意法半导体公司生产的LSM303DLH芯片。LSM303DLH芯片可将连续的地磁场信号转化为离散的数字信号。LSM303DLH芯片的测量分辨率较高,其最高分辨率可达8 mGs,测量范围从1.3~8.1 Gs,可由程序设置选择。在通信方面,LSM303DLH采用I2C总线与微处理器进行通信,具有占用接口少,通信速率较高的优点。
1.1.3 RS485接口电路
RS485接口电路采用SP3485EN芯片。SP3485EN一种低功耗半双工电平转换芯片,完全符合RS485串行协议的要求。当需要发送数据时,将SP3485EN输出使能端TE置1,而需要接收数据时,将使能端TE置为低电平。
1.1.4 LED显示电路
电子罗经传感器的LED显示电路由三位七段发光二极管组成。由于单片机的输出电压、输出电流都很微弱,所以还需要加上拉电阻才能点亮发光二极管,电路设计中采用10 K的上拉电阻。此外,流过发光二极管的电流需要限定,否则发光二极管将被烧坏,电路设计中采用1 K的排阻。LED显示电路如图4所示。
1.1.5 电源变换电路
电子罗经传感器工作时需要两种不同的稳定电压,为此,电源变换电路采用两级稳压电路,由LM1117I-3.3和LM1117I-1.8级联完成。直流输入电压范围为5~15 V,第一级直流电压输出3.3 V,第二级直流电压输出1.8 V。电源变换电路如图5所示。
1.2 GPS模块
GPS模块采用型号为REB3571LP的成品接收头。REB3571LP是台湾鼎天最新推出的SiRF Star III方案模块,接收性能极佳,可广泛用于车载导航和车辆监控安防等领域。其工作电压为3.3 V,工作温度-30℃~+85℃,热启动约1 s,温启动约35 s,冷启动约42 s,定位准确度:10 m(不带SA),输出信息格式满足NMEA0183,输出接口标准为RS232。

图1 船舶GPS、艏向显示器硬件系统框图Fig.1 Main display hardware system block diagram
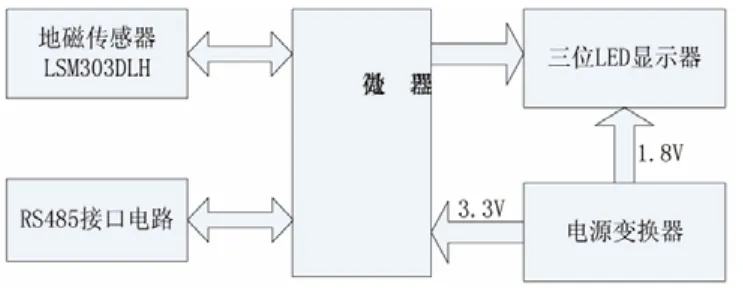
图2 电子罗经传感器硬件系统框图Fig.2 The hardware diagram of electronic compass
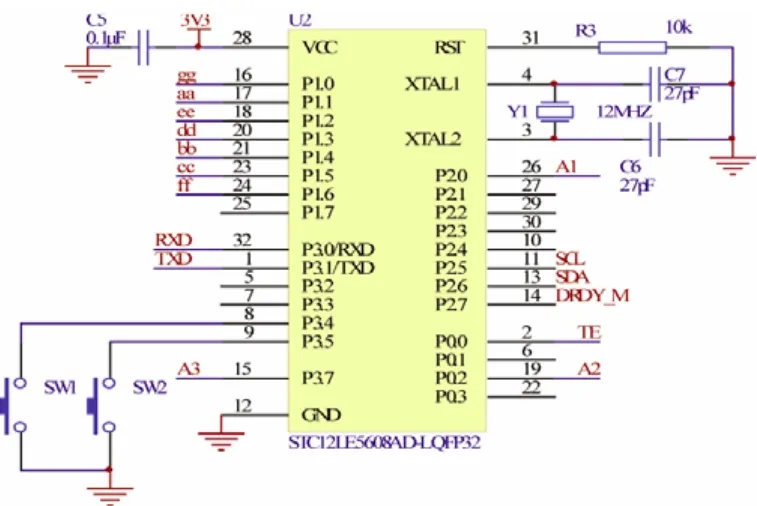
图3 微处理器硬件电路图Fig.3 Circuit diagram of micro controller
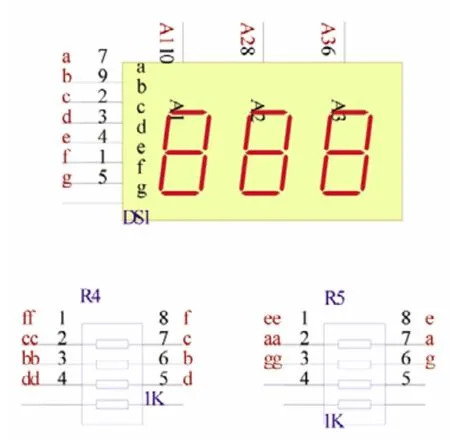
图4 LED显示电路硬件电路图Fig.4 Circuit diagram of LED display

图5 电源变换电路Fig.5 Circuit diagram of power transformation
1.3 主控制器电路
主控制器芯片使用宏晶公司生产的STC12C5A60S2单片机,采用44脚的方形贴片封装形式(LQFP-44)。主控制器的端口资源使用情况如图6所示:单片机的两组串行口(P3.0/P3.1、P1.2/P1.3)分别用于接收电子罗经传感器测得的艏向角信息和GPS模块测得的地理位置信息。P1.0,P1.1,P1.4,P1.5口以SPI总线方式与TFT液晶显示屏进行连接,P1.6口用于检测SPI总线是否忙。
1.4 主显示屏
主显示屏采用深圳彩晶科技有限公司生产的4.3寸16位真彩色液晶屏CJT04301,该屏支持文字及绘图两种混合显示模式,内带768KB的DDRAM,色彩深度65K色,支持SPI、I2C、并口等接口,支持外部串行式Flash/ROM接口,支持文字旋转及放大功能,完全能满足设计要求的信息显示功能。
1.5 电源稳压模块
电源稳压模块分别为主控制器和TFT液晶显示屏提供稳定的直流电压。电源稳压芯片采用LM2576S5.0芯片。直流输入电压范围8~40 V,直流输出电压为5 V。

图6 主控制器硬件电路图Fig.6 Circuit diagram of main controller
2 程序设计
简易船舶GPS、艏向显示器的控制程序包括电子罗经传感器的控制程序和主显示屏的控制程序。
2.1 电子罗经传感器控制程序
电子罗经传感器的主要控制程序有:初始化程序、磁场数据读出与处理程序、输出信息格式控制程序、艏向角LED显示程序、干扰校正程序。
2.1.1 初始化程序
初始化程序的主要工作是:给一些变量单元赋初值、初始化LSM303DLH芯片的I2C总线、设定LSM303DLH芯片的工作参数、开启定时器中断、串口中断、设定串行口波特率等。
2.1.2 磁场数据读出与处理程序
磁场数据读出与处理程序的主要作用是:通过微处理器读LSM303DLH测得的磁场数据,然后再计算出磁北航偏角。在程序设计中,LSM303DLH芯片设定成最快的转换速度,微处理器则连续读取10个数据。在计算磁北航偏角时,采用取多个数据求平均值的方法。对读取到的数据中个别相差较大的数据予以丢弃,以提高求得数据的精确性。由于船舶在航行时转向缓慢,因此数据输出的刷新率不必过高,波特率一般为4 800 Baud/s。当需要提高数据输出刷新率时,可通过按键开关选择。
2.1.3 输出信息格式控制程序
电子罗经传感器通过RS485串口向主显示屏发送数据,其输出信息的语句格式满足IEC-61162-1标准。IEC-61162-1协议对船载自动导航设备(AIS)的信息采集和处理进行了规范化的说明。语句的标准格式为“$+标志字符5个+逗号+数据整数位字符3个+小数点+小数位字符1个+逗号+M标识字符1个+*号+校验码字符2个+退格回车符2个”,共19个ASCⅡ码。如“$HCHDM,108.1,M*21”。其中第一个逗号和第二个逗号之间的数据才是航向角信息,此处艏向角为偏北108.1°。
2.1.4 艏向角LED显示程序
艏向角LED显示程序采用定时器自动中断的动态扫描方法。当需要改变三位LED的发光亮度时,只需要改变定时器的计数初值,即通过改变动态扫描的周期时间。
2.1.5 干扰校正程序
在使用电子罗经传感器时,周围环境中可能存在一定的干扰,从而影响测得数据的准确性。因此,在第一次使用电子罗经传感器时,要把测得磁场数据的最大值和最小值存储在EEPROM中。这样,在以后的使用中干扰校正程序就会把当前电子罗经传感器测得的磁场数据与存储在EEPROM中的数据进行等比对换,从而准确求出船艏与磁北方向角的大小,提高数据的精确度。
2.2 主显示屏的控制程序
主显示屏的控制程序主要有:初始化程序、电子罗经传感器信息接收与处理程序、GPS信息接收与处理程序、显示程序等。
2.2.1 初始化程序
初始化程序的主要工作是:定义变量及标志位,给一些变量、数组单元赋初值,初始化TFT液晶显示屏,开启定时器中断,串口中断,设定定时器工作参数,设定串行口波特率等。
2.2.2 电子罗经传感器信息接收与处理程序
电子罗经传感器的信息接收选择串口中断方法。由于主控制器接收到的是IEC-61162-1格式的信息,如“$HCHDM,108.1,M*29”,其中108.1才是艏向角信息,所以信息处理程序要将其中的艏向角信息提取出来,并发送给显示屏显示。
2.2.3 GPS信息接收与处理程序
GPS信息的接收也通过串口中断方法。GPS通讯格式遵守NMEA0183协定。如接收到的GPS信息为“$GPRMC,002654.000,A,2956.9456,N,12219.2747,E,005.2,024.8,220902,E,W*68”。其中,“$”是语句起始位,后面的信息用逗号分割,依次表示:UTC时间,定位状态,纬度,南北半球,经度,东西半球,地面速率,地面航向,UTC日期,磁偏角(000.0-180.0度),磁偏角(E表示偏东,W表示偏西),模式指示。GPS信息处理程序需要对UTC时间、UTC日期、经度、纬度、磁偏角大小、磁偏角方向进行转换处理,最后发送给主显示屏显示。
2.2.4 显示程序
CJT04301TFT液晶显示屏的显示程序包括:工作窗口及卷动窗口设定程序、清内存程序、图片显示程序、文字显示程序、画图程序(线、面、圆、三角形、矩形等)。
3 测试与性能分析
经测试,简易船舶GPS、艏向显示器的主要技术指标为:
(1)电源电压:9~30 V直流输入;
(2)电源电流:9 V输入下小于250 mA;
(3)信号接口标准:RS-485、RS232;
(4)信息格式:符合IEC-61162-1(NMEA0183兼容)国际标准;
(5)串口波特率:4 800 baud/s(可选);
(6)艏向分辨率:0.1度;
(7)显示屏:4.3寸(480×272)TFT液晶真彩屏。
4 结论
简易船舶GPS艏向显示器具有实时的艏向、航速、地理位置(经度、纬度)、时间等信息显示功能,具有低价实用等特点,在小型渔货船上具有较大的推广应用市场。
[1] 楼然苗, 胡佳文. 基于LSM303DLH的电子罗经传感器设计[J]. 浙江海洋学院学报: 自然科学版, 2012, 31(5): 454-457.
[2] 王贤恩, 楼然苗, 胡佳文. 基于电子罗经的船舶艏向发送器设计[J]. 科技通报, 2014, 30(3): 87-116.
[3] 龚莹莹, 曾连荪. 艏向数字显示器的设计[J]. 电子技术, 2004(4): 11-13.
[4] 王丽颖, 支 炜, 孙红霞, 等. 基于HMC1022磁阻传感器的数字电子罗盘的设计与实现[J]. 电子测量技术, 2009, 32(1):108-111.
[5] 李希胜, 刘洪毅, 郭晓霞, 等. 车用磁电子罗盘的研制[J]. 微计算机信息, 2006, 22(10-1): 308-310.
[6]冯桂兰, 田维坚, 葛 伟, 等. 数字电子罗经系统的设计[J]. 测控技术, 2006, 25(8): 86-88
[7]杨新勇, 黄圣国. 磁罗盘的罗差分析与验证[J]. 电子科技大学学报, 2004, 33(5): 547- 550.
[8]熊 剑, 刘建业, 孙永荣, 等. 数字磁罗盘的研制[J]. 传感器技术, 2004, 23(8): 47-48.
[9]郝振海, 黄圣国. 基于差分磁罗盘的组合艏向系统[J]. 北京航空航天大学学报, 2008, 34(4): 377-380.
[10]张 静, 金志华, 田蔚风. 无艏向基准时数字式磁罗盘的自差校正[J]. 上海交通大学学报, 2004, 38(10): 1 757-1 760.
猜你喜欢
军事文摘(2022年10期)2022-06-15 02:29:30
船海工程(2021年1期)2021-03-02 05:32:02
装备制造技术(2020年4期)2020-12-25 05:26:02
中国船检(2020年10期)2020-11-07 09:56:38
作文大王·低年级(2019年2期)2019-01-23 11:35:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国照明(2016年6期)2016-06-15 20:30:14
电子设计工程(2015年8期)2015-02-27 12:05:32
武夷学院学报(2014年5期)2014-07-19 10:08:30
