
基于GHS软件的倾覆船舶扳正计算与分析
2014-06-09 14:24:25潘德位林成新孙德平刘志杰周超玉
水利水运工程学报 2014年6期
潘德位,林成新,孙德平,刘志杰,周超玉
(1.大连海事大学 交通运输装备与海洋工程学院,辽宁 大连 116026;2.大连海事大学 轮机工程学院,辽宁 大连 116026)
基于GHS软件的倾覆船舶扳正计算与分析
潘德位1,林成新1,孙德平2,刘志杰1,周超玉1
(1.大连海事大学 交通运输装备与海洋工程学院,辽宁 大连 116026;2.大连海事大学 轮机工程学院,辽宁 大连 116026)
在考虑难船浮性和稳性的基础上,研究了倾覆船舶的扳正过程。根据船舶的受力特点,建立了打捞难船的扳正力力学模型;针对传统扳正力编程计算时间长和前期数据输入量大的问题,提出利用GHS软件的Salvage模块进行分析计算。并以某倾覆船舶扳正为例,建立三维模型并对其扳正过程进行仿真计算研究,从计算结果可以分析出最大扳正力值及其出现的扳正阶段、该船舶的稳性状态及船舶纵向上的强度分布情况。GHS软件能够合理模拟横倾船舶的扳正过程,适用于制定船舶救助打捞方案。
倾覆船舶;沉船打捞;扳正力;浮力和稳性;GHS软件
船舶沉没后在水下的姿态各有不同,有的为正坐即甲板向上,更多的为横倾,其横倾角度为0°~180°[1]。打捞时,当沉船出现较大横倾角度时,起浮前应对沉船进行扳正[2]。船舶扳正就是施加在难船上的扳正力矩大于阻力矩使船舶向正方向翻转的过程。倾覆于水面的船舶的浮力主要来自于船舱内储备的空气垫,所以保持船底部的完整或可以快速修补是非常重要的。扳正过程也是扳正力、浮力和船舶重力共同作用的结果。对于具有一定储备浮力和稳性的难船,可以通过计算进行调载和卸载,使船舶横倾与纵倾恢复至适于航行的状态[3-5]。
本文在研究倾覆船舶扳正方法的基础上,根据扳正过程中船舶受力的特点,推导出扳正倾覆船舶的力学公式。针对常规方法计算扳正力复杂低效的缺点,尝试使用GHS软件Salvage模块模拟扳正过程,求解所需最大扳正力和扳正角度,同时得到扳正各阶段沿船舶纵向上的扭矩分布值,对于合理统筹设计扳正施力点具有现实的指导意义。
1 GHS软件简介
GHS软件是以应用水静力学程序为基础不断发展起来的,它利用水静力学理论,分析任意形状海洋浮体结构在给定吃水和倾角时所具备的浮性、稳性和强度。目前,GHS软件由4个模块组成[6],第1个模块为GHS,用于所有类型的船舶及其他浮动结构设计计算和评估的软件系统,它通过使用船只的数学/几何模型计算其受力状态来求解浮性,倾角,稳性和强度;第2个模块为GHS/Salvage,在打捞船舶前期计算时,可以不限制纵倾和横倾,模拟出船舶直立甚至倒立状态;第3个模块为GLM,用于船舶在各种载荷作用下的稳定性和强度监测,具备快速检查船舶安全能力和预期负载能力;第4个模块为BHS,是GHS的衍生程序,具备GHS很多功能,但更易于编辑模型,生成船舱和船舶附体等,特别是可以生成高质量的图表。本文分析计算时采用的是GHS/Salvage模块。
2 数学模型
对于一定倾角的难船进行打捞,首先要对难船进行扳正。通常需要扳正的难船呈3种状态[7]:①小倾角倾斜,需要施加很小的扳正力,甚至不用施加外力,调节舱室载荷即可实现难船扳正;②大倾角倾斜,倾角接近或超过90°,需要外力辅助扳正;③船舶倾覆,一般出现在相对船舶较深的水域。
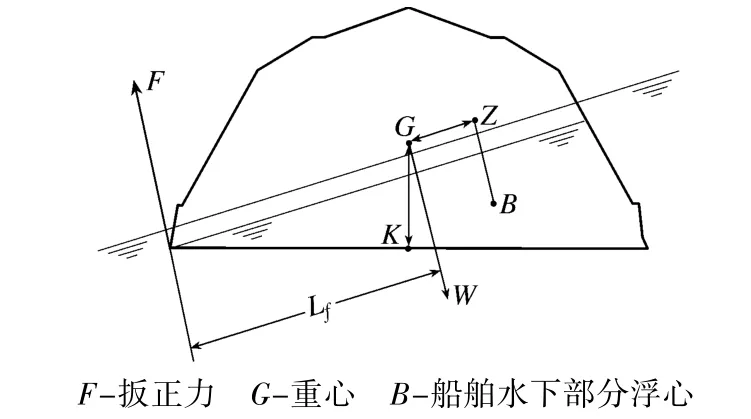
图1 难船扳正过程的某一阶段受力示意Fig.1 Force diagram of righting process at a certain stage
为了便于分析,忽略纵倾的影响,只考虑横倾的变化。因此,船舶的位置可以用横倾角和吃水2个参变量来表示。难船扳正过程的某一阶段受力如图1。
当难船自浮水面稳定时,根据重力与浮力平衡可得到:

式中:W为船舶自重;▽为船舶排水量。
假设在外力F作用时,扳正的过程是分段缓慢进行,各阶段可近似地看作是稳定的,故满足以下的力平衡式:

式中:Φ为横倾角;B为船舶型宽。
当船舶发生瞬间倾覆后,货舱内仍充满着空气,这一部分空气会给船舶提供浮力,称为空气垫。空气垫体积可以假设是等温变化的,根据波意耳定律[8]:

式中:h为倾斜之前船内自由液面低于船外水面的距离;h0为倾斜之后的船内自由液面低于船外水面的距离;V0为初始空气体积;V为某一横倾角下的空气垫体积;P0为大气压强。
倾覆船舶空气垫的存在增加了储备浮力。但是,随着扳正过程的进行,空气垫会逐渐缩小直到消失,同时难船舱室内的自由液面对扳正过程的阻力也会下降。总浮力变小导致扳正可以利用有效浮力减小,因而需要增加提升沉船力量。否则难船可能会直接沉底,大大增加了扳正难度,如果有条件可以在难船上施加吊力阻止下沉。如果空气垫的面积很大但是总的体积却很小,压缩空气的影响可以忽略。对于大型船舶和空气垫很大的船舶而言,不能忽略空气压缩的影响。
根据浮力与重力的合力矩平衡可得:

进一步根据式(2)和(6)可得关于Φ,T的扳正力公式:

通常扳正力需要多次根据横倾角和吃水计算得到。对于任何一个给定的横倾角,可以求出式(7)的解,进一步输入吃水得出扳正力,可以制成图表以便分析。但是,这样只能得到某一船只的扳正力,不具备普遍应用的条件,打捞计算起来极为不便,难以适应快速打捞的需要。
如果针对扳正力公式,对于在任何给定吃水和横倾状况下船舶所有静水力特征的输出信息编辑程序求解,会使计算得到极大的简化,从而加快工作速度,但也需要一定的时间。本文根据船舶的具体信息,采用GHS软件模拟其扳正过程,可以迅速求解。
3 模拟计算实例
在传统的打捞工程中,扳正力的计算采用表格法和经验公式或半经验公式,所得到的结果往往与实际结果偏差较大,曾出现过因扳正力计算错误导致浮吊损毁的情况。所以,传统计算的扳正力对打捞意义有限。扳正现场只能不断调整试探,从而安排所需设备,大大增加打捞成本和时间,工程效率极低[9]。利用GHS软件辅助设计沉船扳正方案能很好地解决上述问题,合理配置扳正力(PULL命令),使扳正方案更为科学,从而完善打捞方案。
3.1 船体模型建立
本文利用GHS软件建立某船舶的模型(图2)。建模完成之后经过进一步修正得到比较准确的模型,以便在随后的计算中得到最接近实际状态的模拟数据。图2中舱室分别填充紫色、深蓝、淡蓝、褐色、黄色和绿色。假设该船由于风浪作用,以倾覆状态漂浮在海面。为了方便扳正难船,卸掉舱室内的货物和燃料。由于褐色舱室顶盖存在破损,导致该舱进水,红色部分表示进水口。难船的倾覆状态如图3,图中由2个横向剖面图组成,文中a表示船尾方向,f表示船首方向,s表示船舶右侧,p表示船舶左侧。

图2 船舶船体和舱室Fig.2 The hull and cabin of a yacht

图3 难船初始状态,左倾180°(上移)Fig.3 The initial state,180 degrees to the left
3.2 静稳性
在图4中,A,B曲线分别为该船遇难前、后的静稳性曲线。船体遇难后,由于上层舱室进水,严重降低了船体的稳性,甚至出现负初稳性,船体的最大复原力臂、极限静倾角和稳矩都不同程度减小,船体的抗倾斜能力必然降低。
3.3 初始状态计算
对建立的模型进行初始状态仿真模拟,可以求解出船舶的吃水、纵倾角、横倾角、重量和重心,从而大大减少打捞前期人工探摸的工作量,提高工作效率。
本次计算中,船舶总长L=5.5 m,型宽B=2.18 m,型深D=0.9 m,船体质量W=1.1 t,初始状态时横倾角=180°(p),纵倾角=1.59°(a)。在模型的横剖面上合理布置施力作用点,为简化分析,在船体的两个横剖面上合理布置6个施力作用点,确定每个施力点扳正力的作用方向和角度,见表1。
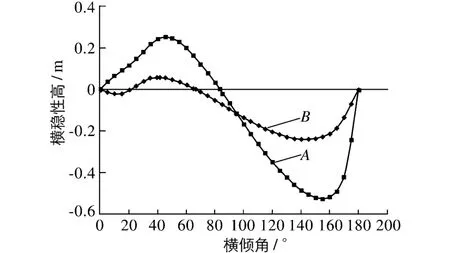
图4 船舶静稳性曲线Fig.4 Curves of statical stability of a yacht
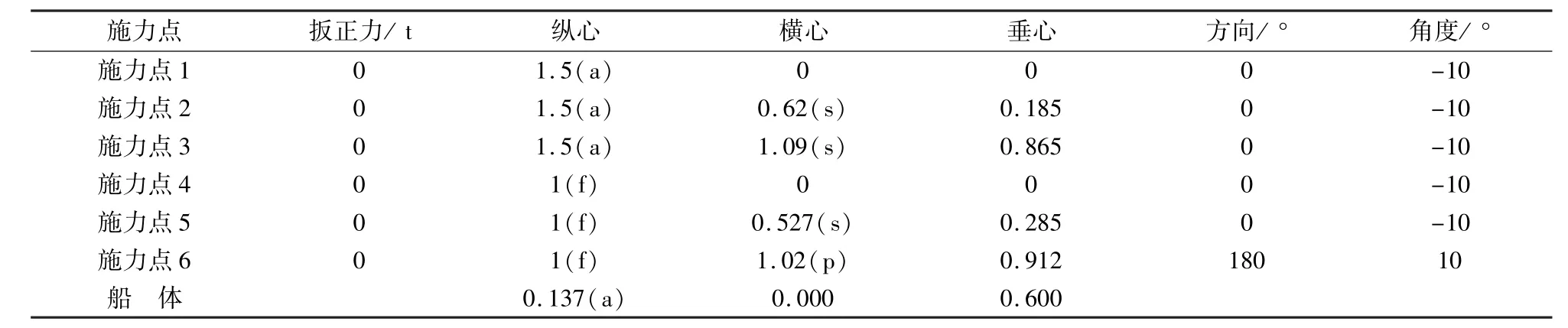
表1 初始载荷下某船舶的基本数据Tab.1 Basic data of a yacht in initial state
3.4 扳正过程模拟
3.4.1扳正过程 迅速准确计算难船所需的最大扳正力能有效减少扳正时间,对整个打捞工程非常必要。通过GHS软件模拟仿真扳正过程,能很快解出结果,为打捞初期方案设计提供理论参考。打捞工作开始后,适当地在各作用点施加扳正力,当扳正力矩大于阻力矩,难船开始滚动。扳正力达到所需要的最大值并不是一次实现的,而是通过数次加载完成,扳正过程也是施加扳正力的过程。为了保证扳正过程的安全、有序,每进行一次扳正力的加载,都应当暂停,通过对扳正缆和沉船等进行观察,确定无安全隐患后,再继续按扳正方案进行加载。
由初始状态开始对扳正力适当赋值,并逐渐递增(本例中增力为0.05 t)。难船扳正过程见图5和6,图中分别为船体纵向坐标为1(f)和1.25(a)的截面。图6中船舶向右倾斜表示完全扳正后施加的扳正力产生扳正力矩继续对船舶作用的结果。

图5 难船扳正过程中任一状态,左倾167.78°Fig.5 A certain state of righting process,167.78 degrees to the left
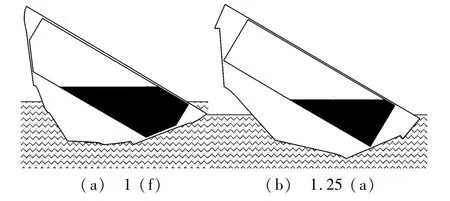
图6 难船完全扳正后状态,右倾30.93°Fig.6 The state after sitting,30.93 degrees to the right
3.4.2破舱计算 船舶倾覆后,破损舱室进入一定量的海水。随着船舶的转动,在船体自重、倾角和舱室内剩余气体的作用下,舱室内的进水量和空气占舱室的体积分数会发生变化,见表2。

表2 进水舱室基本数据Tab.2 Basic data of damaged cabin
随着船体横倾角度的变化,舱室进水口的深度发生变化,在压力作用下舱室内空气体积分数也相应发生改变。由于该船自重较小,完整舱室均无载货,吃水较浅,导致破舱内压力变化较小,故软件没有精确显示出破舱进水量小范围的波动。
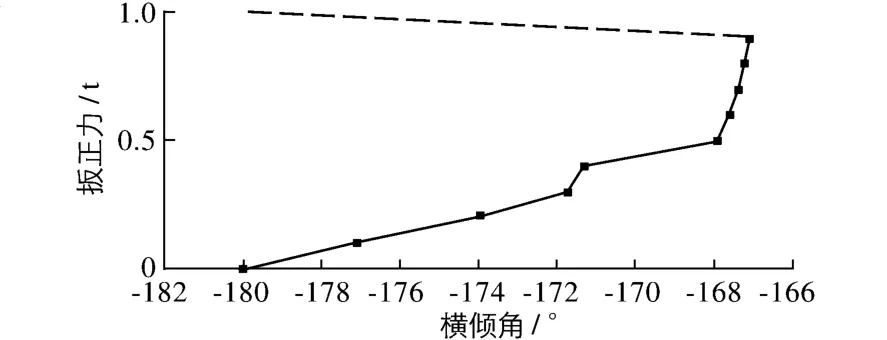
图7 扳正过程中扳正力的变化Fig.7 Variation of righting force during uprighting process
3.4.3扳正力 船体扳正前期,扳正力值会随着船体横倾角度的减小而逐渐增加。当扳正力值达到最大后,会随着船体转动而逐渐降低,直至外力扳正作用消失。实际打捞工程中,根据最大扳正力,可以进一步预备相关扳正设备和制定详细的打捞方案。图7为所需扳正力值随横倾角变化。
图7中,扳正力变化线由两组线段组成,其中实线段表示船体扳正过程中扳正力逐渐增大的过程;虚线表示船体正坐后持续施加最大扳正力使其倾斜的结果。虚线段一端较大值表示整个扳正过程的最大扳正力值为1 t。扳正力的大小与施力点的位置设计、扳正力方向和角度相关,有条件的情况可以利用设备增加扳正力矩,降低扳正力。扳正点的位置应根据实际情况进行调整,保证扳正过程中船体的安全。
3.4.4船体强度 船舶扳正过程中,由于外力作用,需要慎重考虑船体强度的分布情况。正常航行中,普通船舶极少考虑船体纵向扭转强度,通常在满足纵向弯曲强度的条件下,扭转强度一般也能满足。但是,在船舶扳正过程中,则需要适当考虑扭转强度。由图7可知,船体扳正到左倾167.08°后,扳正力达到最大值。图8为难船在左倾167.08°时船体强度分布曲线。
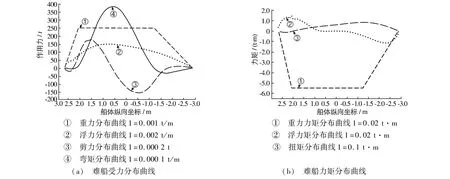
图8 船体强度分布(船尾←纵向→船头)Fig.8 Intensity distribution of hull(stern←longitudinal→bow)
船体质量分布是难船打捞设计的基础参数之一,包括船体质量和载货分布。浮力分布与船体质量分布、船体型线、船体倾角和吃水密切相关。剪力分布为船体质量分布、浮力分布和扳正力分布的代数和的积分。而弯矩分布和扭矩分布则为剪力分布的进一步积分。船体强度的计算结果是整体打捞难船的依据,也是检验扳正点位置设计合理与否的重要依据。
难船扳正过程中,GHS软件只能求解出某一阶段的扭矩分布值,不能得到整个扳正过程中的扭矩值。由于GHS软件能快速计算船舶强度,特殊工况下,可以减小扳正力的增值,模拟扳正过程中的多个阶段求解扭矩,使各阶段之间的差值相对较小,得到的数据尽可能详细,所以对于打捞前期的力学估算依旧具有重要的实际意义。
4 结 语
在考虑难船浮性和稳性的基础上,根据打捞方案,对难船扳正过程进行力学分析,并推导出扳正过程的扳正力公式。针对船体打捞计算复杂、低效的缺点,利用GHS软件对扳正过程进行仿真模拟,得到扳正该船舶所需的最大扳正力,特别是船舶纵向上的强度分布值,可以检验初始设定的扳正施力点合理性。所采用的软件分析方法,遵循力学基本原理,对其他相似情况的船舶扳正工作均适用。
GHS软件的计算方式是线性修正计算,沿船长方向切分的微体积单元通过线性连接以差分法计算。因此,该软件计算简单,所占计算机资源较少,运行速度更快。GHS软件能实现逆向逻辑求解船舶稳性状态,即给定某一船舶状态,逆向反推回去计算满足此状态下压载舱、货舱以及其他一些舱室的配载情况,这对迅速响应救助打捞工程也非常适用。
参 考 文 献:
[1]张增猛.打捞工程[M].大连:大连海事大学出版社,2012:208-211.(ZHANG Zeng-meng.Salvage engineering[M]. Dalian:Dalian Maritime University Press,2012:208-211.(in Chinese))
[2]刘汉明,臧海鹏.沉船打捞技术设计与分析[M].青岛:中国海洋大学出版社,2011:18-21.(LIU Han-ming,ZANG Haipeng.Technical design and analysis on salvage[M].Qingdao:China Ocean University Press,2011:18-21.(in Chinese))
[3]PHILLIP S.Counter-capsizing a battleship[J].Naval Engineers Journal,2005,117(1):101-110.
[4]MORRIS L P.Salvage of the Oklahoma at Pearl Harbor[J].Engineering and Science,1947(11):9-17.
[5]United States Navy.U S Navy salvage manual volume 2:pol offloading[M].American:Direction of Commander,Naval Sea Systems Command,1991:22-24.
[6]Creative Systems.GHS user′s manual[M].American:Creative Systems,Inc.2007.
[7]ZHANG Meng-xin.Discussion on uprighting big-angle tilted sunken ships underwater in salvage operation[J].China Ocean Engineering,1989(2):217-227.
[8]DROBYSHEVSKI Y.A note on uprighting of a ship floating upside-down[J].Ocean Engineering,2004,31(11/12):1447-1467.
[9]林金雄,王仁义,孙召才.“银河山168”沉船打捞工程[C]∥救捞专业委员会2006年学术交流会论文集,2006:83-89. (LIN Jin-xiong,WANG Ren-yi,SUN Zhao-cai.The salvage of the ship Yinheshan l68[C]∥Proceedings of China International Rescue&Salvage Conference 2006(CIRSC),2006:83-89.(in Chinese))
Calculation and analysis of righting capsized vessel based on GHS software
PAN De-wei1,LIN Cheng-xin1,SUN De-ping2,LIU Zhi-jie1,ZHOU Chao-yu1
(1.Transportation Equipment&Ocean Engineering,Dalian Maritime University,Dalian 116026,China; 2.Marine Engineering College,Dalian Maritime University,Dalian 116026,China)
The uprighting process of the capsized vessel considering the buoyancy and stability of the wreck has been studied in this paper.A model of the righting force for the wreck salvage is established according to the mechanical characteristics of the wreck.The analysis and calculation are demonstrated by the salvage module of GHS software in view of the problem of righting force programme,which needs long computing time and large amount of data input.Taking the simulation of righting a capsized ship as an example,a three-dimensional model is developed and the righting process is simulated by using GHS software.The maximum righting force and the occurring phase,angle of vanishing stability and longitudinal distribution of torque values can be obtained from the analysis.And the analysis results can play a crucial role in the uprighting process of the capsized ship.The uprighting process of the inclining ship can be simulated by using GHS software,which is suitable for making salvage schemes.
capsized vessels;wreck salvage;righting force;buoyant force and stability;GHS software
U676.6
A
1009-640X(2014)06-0078-06
2014-04-29
潘德位(1986-),男,辽宁庄河人,博士研究生,主要从事船舶救助打捞的研究。E-mail:wssrwsmt@163.com
林成新(E-mail:lchxin@dlmu.edu.cn)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:04:46
舰船科学技术(2022年10期)2022-06-17 06:27:26
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
少儿科学周刊·儿童版(2015年2期)2015-07-07 03:37:26
舰船科学技术(2015年8期)2015-02-27 15:38:55
广东造船(2015年6期)2015-02-27 10:52:45
船海工程(2013年6期)2013-03-11 18:57:37
船海工程(2013年6期)2013-03-11 18:57:35
