基于激光差动共焦技术的后顶焦度测量系统
2014-06-07 10:02洪宝玉赵维谦
计量学报 2014年2期
李 飞, 李 林, 洪宝玉, 赵维谦
(1.北京理工大学,北京 100081; 2.中国计量科学研究院,北京 100013)
基于激光差动共焦技术的后顶焦度测量系统
李 飞1,2, 李 林1, 洪宝玉2, 赵维谦1
(1.北京理工大学,北京 100081; 2.中国计量科学研究院,北京 100013)
为满足后顶焦度高精度测量需求,提出了一种基于激光差动共焦技术的后顶焦度测量方法,研制了一套测量系统。该系统将激光差动共焦技术的精密定焦性能应用于后顶焦度测量,显著地提高了定焦定位能力,利用干涉测长技术测量相应偏离距离,最终实现后顶焦度的精密测量。分析了测量装置的设计思路和测量精度的影响因素。理论分析和实验结果表明,该系统测量精度可达0.03m-1。
计量学;激光差动共焦定焦;后顶焦度;定焦误差;校准
1 引 言
眼科光学中,后顶焦度通常用于表示镜片的屈光能力[1,2]。目前,后顶焦度的测量主要采用以哈特曼法为基础的自动焦度计和基于清晰度法的手动调焦式焦度计。前者测量精度可达0.03 m-1,且测量重复性好,但未能考察整个通光口径的成像质量,所以未被国际标准采纳为验光镜片和综合验光仪的通用测量仪器[3,4]。后者测量系统相对口径较小,焦深较大,其读数刻度间隔一般为0.12 m-1,仅该项引入的测量误差就约为0.04 m-1,因此测量精度不高。另外ISO 10341推荐了一种自准直光路法[5],它在调焦式焦度计的基础上,通过增加球面反射镜实现光路自准直。激光差动共焦系统其轴向响应特性曲线的零点与透镜聚焦点具有极其灵敏的对应特性,这一特性给定焦技术带来了积极的影响,相关研究已将这一特性应用于曲率半径、中心厚度、焦距等参数的测量[6~9]。本文根据上述特性,提出了一种基于激光差动共焦定焦技术的后顶焦度测量方法,可实现后顶焦度的高精度计量。
2 测量系统原理
2.1 差动共焦定焦原理
激光差动定焦原理如图1所示[8],点光源发出的光经准直物镜Lc后,经偏振分光镜PBS、四分之一波片P、聚焦透镜L2聚焦于O点,O点同时也是凹面反射镜球心,光线经凹面反射镜反射返回依次进入聚焦物镜L2、四分之一波片P、偏振分光镜PBS、成像物镜L1后,进入分光镜BS,经分束的两束光分别被2个探测器接收,其中2探测器与和共焦面共轭的焦平面的偏移量分别为+M与-M。
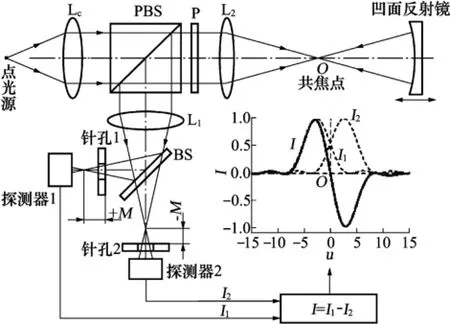
图1 差动共焦定焦原理
当凹面反射镜沿光轴在共焦位置附近作轴向运动时,两路强度信号的轴向差动响应I(u,uM)满足[8]:

式中:u为轴向归一化光学坐标,ρ为出瞳处归一化半径,M为探测器到焦平面的偏移量,z为轴向坐标,D/f为系统的相对孔径。
由式(1)及图中的仿真曲线可知,差动共焦响应曲线I(u,uM)的零点精密对应着差动共焦聚焦点,因此具有极强的定焦能力。
激光差动共焦系统定焦误差为[8]:

式中:RS/N为探测器的信噪比。当被测元件面形(PV)达到0.1λ时,RS/N可达到200∶1,远大于1。相比传统定焦误差公式,式(3)多除了一个大于1的RS/N因子,因此明显提高了定焦精度。
2.2 差动共焦后顶焦度测量原理
利用差动共焦系统,可通过直接确定被测镜片的后顶点和焦点位置获得镜片后顶焦距,进而计算后顶焦度[8]。但该方法有两个缺陷:①不能直接测量顶焦度为负的镜片,而常用眼镜片主要是顶焦度为负的镜片;②对综合验光仪等特殊产品,由于存在保护玻璃、多组镜片共顶点的设计特性,后顶点往往是虚拟的,测量时一般难以找到实际参考平面;因此不太适用于后顶焦度的测量。
激光差动共焦法测量后顶焦度的测量原理是由激光照明的点光源发出的光经分光镜BS、准直物镜Lc、成像物镜L2聚焦于O点,凹面反射镜的曲率中心位于O点,且凹面反射镜连接着干涉测长系统。经凹面反射镜反射返回的光束进入由显微镜和CCD分别构成的激光差动信号探测系统。当光路中不放入被测镜片(图2)或被测镜片后顶焦度为0 m-1时,凹面反射镜沿光轴在共焦位置附近作轴向运动即可扫描得出凹面反射镜的原点位置。

图2 激光差动共焦后顶焦度测量原理
当后顶焦度不为零的被测镜片放在距离物镜L2的前焦点x时,通过移动球面反射镜,可再次在相应位置找到焦点。球面反射镜移动的距离可以通过干涉测长测量而出。此时后顶焦度Φ为:

式中:f′为物镜L2的焦距,m;z为反射镜相对零点位置移动的距离,m;x为参考平面距离物镜L2前焦平面的距离,m。
通常被测镜片的参考平面与物镜L2前焦平面重合。此时式(4)可简化为:

由式(5)看出,f′确定后,后顶焦度随反射镜的移动距离线性变化。
3 实验装置结构参数设计
后顶焦度测量范围一般为-25m-1~+25m-1。当被测后顶焦度为+25 m-1时,上述测量原理要求f′不能超过40 mm。同时在实际装置的设计中,被测系统与物镜L2组合系统的相对孔径决定着整个系统的相对孔径,最终影响系统的定焦精度。从式(5)可看出,影响后顶焦度测量精度的主要有长度测量精度和f′。当长度测量精度为0.005mm时,根据式(3)考虑被测镜片与物镜L2组合系统的相对孔径,计算定焦误差,综合计算f′与系统测量精度的关系如图3所示。由图中看出,f′越大,测量精度越高,但f′越大,反射镜的行程也需变大,测量装置的整体尺寸较大。
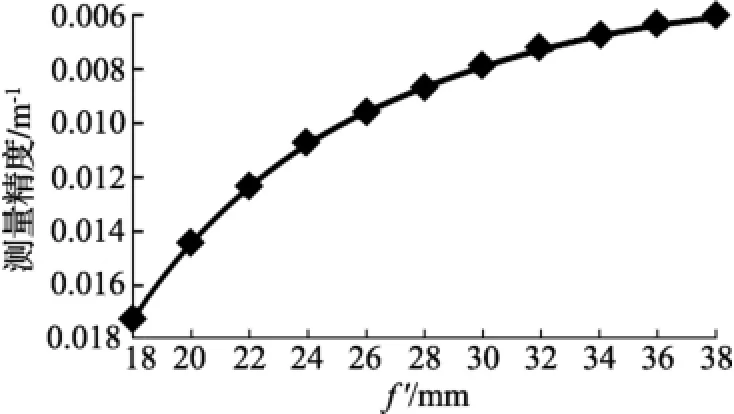
图3 物镜L2焦距与测量精度的关系
分析表明f′越大,测量精度越高,但不能超过40 mm,同时考虑f′从30mm变化到40mm,测量精度并没有明显提高,但反射镜移动范围却需要增大一倍,折中考虑,f′设计为30mm,而且为校正轴上点像差,对镜头的成像质量要求较高。根据测量范围可知,反射镜移动范围至少为±22.5 mm,凹面反射镜的曲率半径为40mm。
测量装置主要由激光差动共焦主机、可调夹持器、五维调整支架、Renishaw XL-80双频测长干涉仪等部分组成。系统采用了有效行程1 m气浮导轨,其导轨直线性优于0.5μm;并配有环境监控系统,可降低测量过程中波面受大气扰动的影响。
4 误差分析
4.1 干涉仪测长误差σz1
原点(不放任何镜片确定的共焦点)与共焦点位置之间的距离通过双频激光干涉仪XL-80测得,干涉仪在任意40 mm内的测长精度为0.000 5 mm,因此标准差为:

4.2 定焦误差σz2
定焦精度主要受以下因素影响:光学系统相对口径、光学元件面形质量、探测器固有噪声以及环境稳定性。其中相对孔径主要由被测镜片及物镜L2组合系统的相对口径起作用。面形质量、探测器噪声以及机械振动是随机误差,会增加差动偏置曲线的波动性,降低共焦位置探测灵敏度。当f′=30mm,D=7mm,-25m-1镜片和物镜L2组成的相对孔径约为1/12。当差动主机平行光管产生的光为理想平行光,显微物镜放大倍率为25,探测器像元尺寸为8μm,被测镜片面形误差(PV)为0.2λ时,根据实验研究,RS/N可达到50∶1。根据式(3)计算,定焦误差为:

4.3 物镜L2焦距测量误差σf′
物镜L2的焦距是最大误差源,可以通过精密测定焦距的方法进行校准,其相对误差可以达到0.1%,因此σf′为

4.4 参考平面与物镜L2前焦平面不一致引入的误差σx
实际测量过程中,参考平面与物镜L2前焦平面存在不一致,可以通过由物镜L2构成的自准直光路,并借助前置镜实现参考平面的精密定位。通过此方法参考平面与物镜L2前焦平面不一致的误差可达到0.01mm,因此则有:

4.5 误差合成

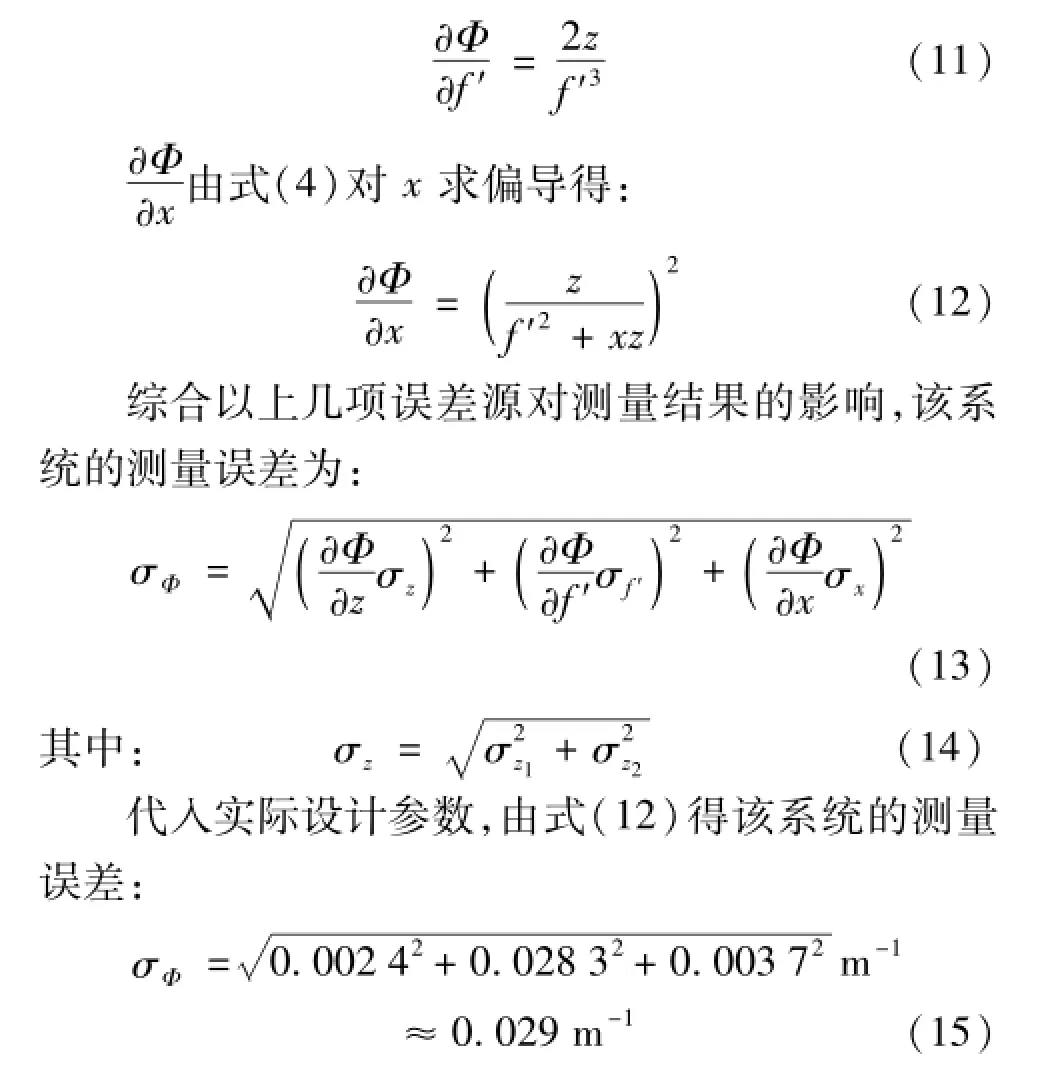
式中:定焦误差对测量结果的影响在0.001 m-1量级,作为随机误差已经很小,相对传统测量仪器得到明显改善;物镜L2的焦距测量不准对结果影响最大,也是系统误差,为进一步提高测量准确度,通过采用不确定度为0.01 m-1~0.02m-1(k=3)的顶焦度基准镜片进行定点标定,并采用最小二乘拟合修正物镜L2的焦距,可进一步提高系统测量准确性。
5 实验验证
使用不确定度为0.02 m-1~0.03 m-1(k=3)的后顶焦度标准镜片在研制的激光差动后顶焦度测量装置对进行实验验证,每个镜片分别测量4次。后顶焦度标准镜片溯源到顶焦度国家基准,且该激光差动后顶焦度测量系统的物镜L2采用系统校准后的物镜焦距值。测量结果见表1。
6 结 论
激光差动共焦后顶焦度测量系统利用差动共焦系统的轴向强度响应曲线的零点与共焦位置的对应关系实现精密定焦,并通过干涉测长技术获取共焦点与原点之间的距离,继而实现后顶焦度的高精度测量。在光学元件面形良好和空气扰动较小情况下,激光差动共焦后顶焦度测量法的定焦精度较高,随机误差较小,具有较高的测量重复性。通过顶焦度基准镜片校准,减小系统物镜的焦距误差情况下,该方法的测量精度较高,可以满足眼镜镜片顶焦度计量需求。
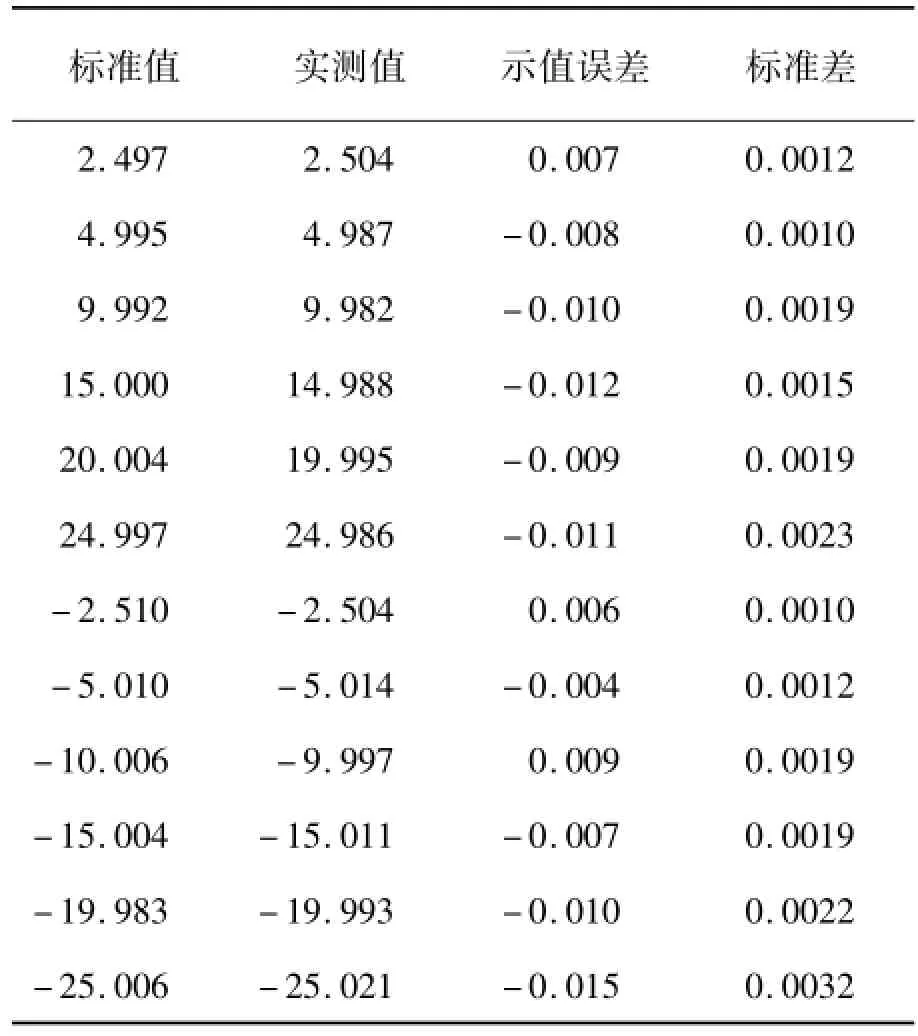
表1 标准镜片测量结果m-1
[1] 马振亚,王莉茹,胡继军.顶焦度标准镜片组的研制[J].计量学报,1991,12(3):166-172.
[2] 马振亚,王莉茹,刘文丽,等.角膜接触镜专用顶焦度标准器的研制[J].计量学报,2001,22(2):102-105.
[3] Zhang JY,Sun J,Gao M L,etal.Metrological research on test method for phoropters[C]//8th International Conference on Electronic Measurement and Instruments,Beijing,China,2007.
[4] 张吉焱,刘文丽,孙劼.综合验光仪中镜片偏心与倾斜对验光的影响分析[J].计量学报,2010,21(1):17-21.
[5] ISO 10341:2009 Ophthalmic instruments-Refractor heads[S].
[6] 孙若端,邱丽荣,杨佳苗,等.激光差动共焦曲率半径测量系统的研制[J].仪器仪表学报,2011,32(12):2833-2838.
[7] 史立波,邱丽荣,王允,等.激光差动共焦透镜中心厚度测量系统的研制[J].仪器仪表学报,2012,33(3):683-688.
[8] ZhaoW Q,Sun R D,Qiu L R,etal.Laser differential confocal radius measurement[J].OpticsExpress,2010,18(3):2345-2360.
[9] Zhao W Q,Sun R D,Qiu L R.Laser differential confocal ultra-long focal length measurement[J].Optics Express,2009,17(22):20051-20062.
Back-vertex-power Measurem ent System Based on Laser Differential Confocal Technique
LIFei1,2, LILin1, HONG Bao-yu2, ZHAOWei-qian1
(1.Beijing Institute of Technology,Beijing 100081,China;2.National Institute of Metrology,Beijing 100013,China)
A new vertex-powermeasurementmethod based on laser differential confocal technique is proposed for the demand of high-precision back-vertex-powermeasurement.A vertex power measurement system is built up.This system takes advantage of outstanding focusing ability of laser differential confocal system to improve the positioning accuracy,and uses the interferometer tomeasure the distance from the origin and finally gets the results by means of conversion of the formula.The component design specifications and influence factors are analyzed.Theoretical analysis and experimental results show that themeasurement error of themethod is about 0.03m-1.
Metrology;Laser differential confocal focusing;Back-vertex-power;Focusing error;Calibration
TB96
A
1000-1158(2014)02-0129-04
10.3969/j.issn.1000-1158.2014.02.07
2013-06-13;
2013-09-22
国家重大科学仪器设备开发专项(2011YQ04013609)
李飞(1977-),安徽萧县人,中国计量科学研究院副研究员,在读博士研究生,主要从事精密几何光学和成像光学等方面的研究。lif@nim.ac.cn
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05
摄影之友(2018年10期)2018-10-15
航天返回与遥感(2017年4期)2017-09-28
中国设备工程(2017年11期)2017-06-29
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
摄影世界(2016年7期)2016-05-14
中国眼镜科技杂志(2014年17期)2014-07-24
电子工业专用设备(2012年12期)2012-09-16