
基于距离约束的井下目标定位方法
2014-06-07 05:55刘晓阳李宗伟田子建
煤炭学报 2014年4期
刘晓阳,李宗伟,方 轲,田子建
(1.中国矿业大学(北京)机电与信息工程学院,北京 100083;2.煤炭科学研究总院安全装备技术研究分院,北京 100013)
基于距离约束的井下目标定位方法
刘晓阳1,李宗伟2,方 轲1,田子建1
(1.中国矿业大学(北京)机电与信息工程学院,北京 100083;2.煤炭科学研究总院安全装备技术研究分院,北京 100013)
煤矿井下巷道为狭长的条状结构,信号衰减较大,地面已有的目标定位方法和技术难以直接应用于井下,现有的矿井目标定位主要采取基于时间和信号强度的测距方法,而这些方法并没有考虑到井下巷道的条状结构特点,定位误差较大,依据矿井巷道的条状结构特点,提出一种基于距离约束的井下目标定位方法。在巷道内每4个锚节点构成1个矩形区域,将固定的两锚节点之间的距离作为约束条件,结合垂直向量乘积为零的原理,矩形对角线的长度已知,通过基于RSSI的测距原理获得移动节点到矩形区域两对角线上锚节点的距离之比公式,进而通过合理的近似运算和向量乘法定理得到向量方程组,通过求解向量方程组可以得到移动节点的坐标,仿真实验表明该方法可以有效地降低定位误差。
距离约束;矿井;目标定位;RSSI
煤炭是我国国民经济发展的基础,占一次能源的70%左右。据全国能源工作会议的预测,到“十二五”末期,我国煤炭产量将占全球总产量的50%[1-2]。但是,井下作业环境复杂,工作人员及设备的监管调配难度大,且安全隐患较多,导致矿难频繁发生,实现井下人员、机车的实时定位,不仅有利于资源的合理调配,而且对矿难发生时的及时抢救,减少生命财产损失有着重要的意义。目前取得矿用产品安全标志证的煤矿位置监测系统主要采用RFID技术,部分系统采用漏泄、WiFi、ZigBee等技术,这些技术自身特点决定了定位精度都较粗,难以满足安全生产及应急救援的需求,所以,迫切需要研究适合煤矿井下环境的高精度定位方法。
1 矿井目标定位需求
根据定位机制的不同,无线传感器网络定位算法可分为两类:基于测距(range-based)和非测距(rangefree)。前者通过测量节点间点到点的距离或角度信息计算节点位置;后者根据网络连通性等信息实现定位。后者在成本、功耗等方面具有一定优势,并且其受硬件限制小,但定位精度相对较低,且对节点密度的要求很高[3-5]。所以,煤矿井下适合使用基于测距的定位技术。基于测距的定位技术主要包括测量到达时间(TOA)[6]、测量时间差(TDOA)[7]、测量到达角度(AOA)[8]以及测量信号接收强度指示(RSSI)[9]等方法。前3种方法虽然在理论上具有较高的测距精度,但是由于硬件条件的限制,目前在无线传感器网络节点定位中难以得到实际应用。而基于RSSI的测距方法不需要添加额外的硬件,是煤矿安全监测无线传感器节点定位实际可实现的方法[10]。
2 RSSI测距
使用信号接收强度指示(RSSI)方法测量距离,选择适当的无线传输模型是至关重要的。常用的无线电波传播路径损耗模型有:自由空间传播模型,对数距离路径衰减模型、对数-常态分布模型等[11],考虑井下巷道的实际环境,选择对数-常态分布模型较为合理。
对数-常态分布模型的表达式为

式中,P(d)为是收发节点距离为d时的接收信号强度,dB·m;δ为路径衰减因子,其数值取决于无线信号的传播环境,是一个经验值;d0为发射节点和参考点之间的距离,一般取1 m;Xσ为标准差为σ的零均值正态分布随机变量,dB·m;P(d0)为参考点处的接收信号强度。
根据文献[12-13],对数-常态分布模型可以使用简化模型逼近,即省略Xσ:

设移动节点接收到锚节点发射的电磁波信号强度为PR,则根据式(2)获得锚节点与移动节点之间的距离为

3 距离比公式
考虑一个移动节点接收两个锚节点发射电磁波的情况,如图1所示,移动节点C收到锚节点A和锚节点B两个锚节点发射的电磁波信号,设AC长度为d1,BC长度为d2,设锚节点A和锚节点B发射信号强度相同,移动节点接收到锚节点A的信号强度为PR1,移动节点接收到锚节点B的信号强度为PR2,则根据式(3)可以得d1,d2的表达式,分别为

图1 一个移动节点接收两个锚节点信号的情况Fig.1 One mobile receives signal of two anchor nodes
4 距离约束方法
如图1所示,作移动节点C到锚节点A和锚节点B连线的垂线,设垂足为D,则AC和BC分别在直角三角形ACD和直角三角形CBD中,则有
在狭窄巷道两,巷道壁之间的距离很短,一般在3~6 m[14],则CD的长度为1.5~3.0 m;在宽大巷道(或井下车库等)可以通过并排铺设多条矩形区块的方法实现全覆盖,并使CD控制在1.5~3.0 m。巷道延伸方向的距离可达数百米甚至更长,依据井下允许的电磁波发射功率也可以使测距范围达到50 m以上,则两锚节点之间的距离可达到50 m以上,考虑井下巷道目标定位的精度要求为米数量级,所以假设CD的长度相对于AD和BD的长度是可以忽略的。则根据式(7)有

锚节点一旦铺设,位置不再改变,故AB长度是固定的,设为l,以这个长度为约束条件,即D点位置任意改变,永远有
5 距离约束在矩形区块的应用
为了得到移动节点在巷道内的二维坐标,锚节点的布设方式如图2所示。
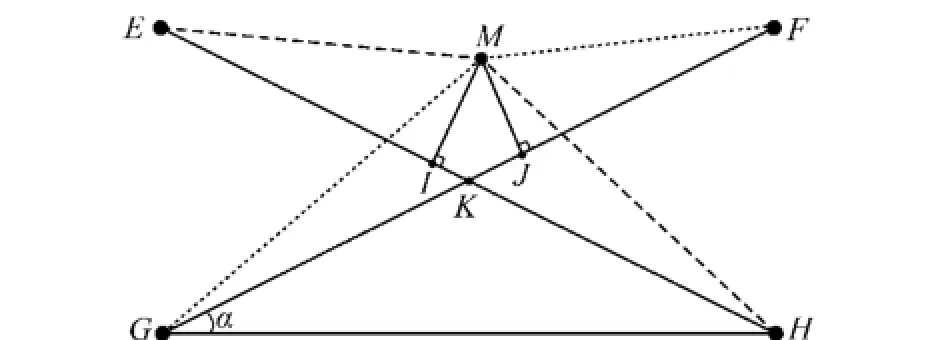
图2 锚节点布设方式Fig.2 The distribution mode of the anchor nodes
图2中,E,F,G,H为4个锚节点,EFGH构成一个矩形;M为移动节点,EH与FG的连线相交于点K。图2中的虚线EM,FM,GM,HM表示移动节点M接收E,F,G,H四个锚节点发射的电磁波定位信号, MI为点M到EH的垂线,垂足为I,MJ为点M到FG的垂线,垂足为J。设FG与GH的夹角为α,当锚节点布设好,这个角是固定值。
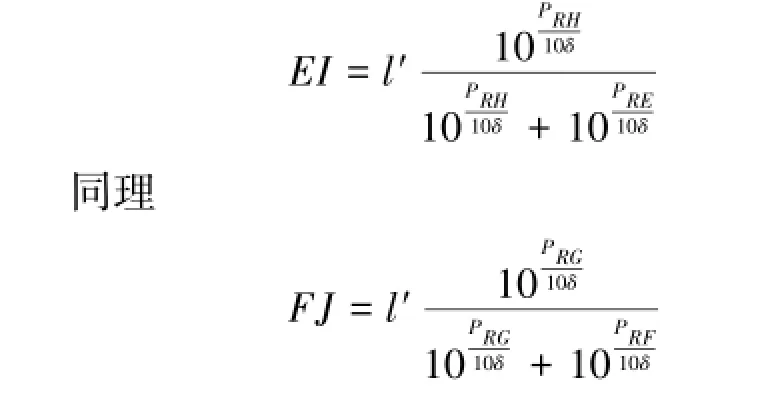
4个锚节点的发射信号强度相同,均为PT,移动节点M接收到锚节点E发射的电磁波定位信号强度为PRE,接收到锚节点F发射的电磁波定位信号强度为PRF,接收到锚节点G发射的电磁波定位信号强度为PRG,接收到锚节点E发射的电磁波定位信号强度为PRH,设EH=FG=l′,则根据式(9)得
6 坐标建立及定位算法


图3 以E为原点建立的坐标系Fig.3 Established coordinate system with E as the origin

图4 移动节点位置的其他所有情况Fig.4 All other positions that one mobile node would be at
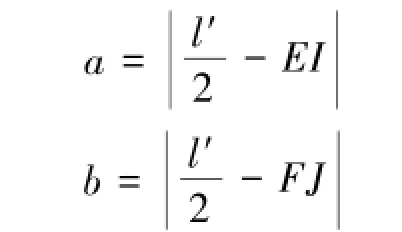
所有情况下均可设IK的长度为a,JK的长度为b,则有
设I的坐标为(Ix,Iy),J的坐标为(Jx,Jy),图5为在图3所示情况下的K点处的局部图,OQ为与GH平行且穿过点K的直线,可知点I和点J的坐标可根据a,b和角α求出,即


图5 K点处的局部Fig.5 The details near K point
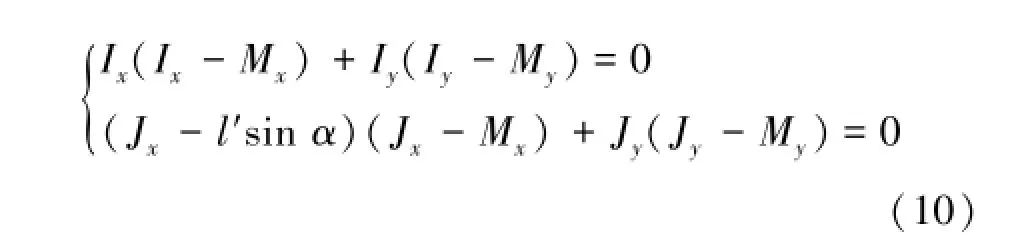
代入数据,使用计算机解该方程组即可得到移动节点的二维坐标。
7 仿真及设计的优化
采用计算机仿真方法验证方法的可行性,假设某煤矿安全检测局部无线传感器网络区域为6 m×50 m的矩形范围。
7.1 理想情况下的算法仿真
由于本方法采用了近似算法,所以存在理论误差,为使本方法的理论误差降到最小,首先在理想的环境下进行仿真,设井下采用2.4 GHz的电磁波,在路径衰减因子不变的情况下进行仿真。巷道横向宽度为6 m,即横向两个锚节点之间的距离为6 m,设置纵向两锚节点的距离为50 m,即4个锚节点为一个长50 m、宽6 m矩形的4个顶点。在4个锚节点构成的矩形范围内均匀选取3×24=72个移动节点的位置,如图6所示,4个圆圈表示4个锚节点,黑色圆点为待定位的移动节点位置。
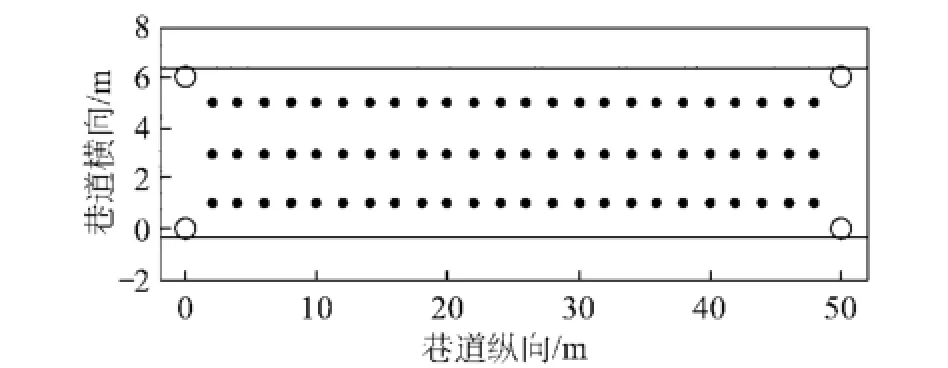
图6 锚节点及待定位移动节点分布Fig.6 The distribution mode of anchor nodes and mobile to be positioned
图7为理想情况下仿真结果,图中黑色八线符为使用基于距离约束的定位算法得到的定位点,可以观察到纵向的定位效果很好,而横向的定位效果在移动节点距离锚节点比较近的位置时很差,这是由于算法本身包含的近似运算造成的。将图1中的移动节点C向一侧锚节点A(或B)移动,如图8所示,当移动节点C距离锚节点A很近时,CD的长度相对于AC的长度已经不能省略,所以会出现很大的理论误差。
在井下狭窄巷道,纵向定位精度的参考价值很大,而横向定位精度的参考价值不大,所以本方法用在狭窄巷道有明显优势。
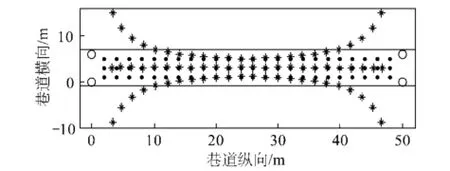
图7 理想情况下的仿真结果Fig.7 The simulation results in ideal situation
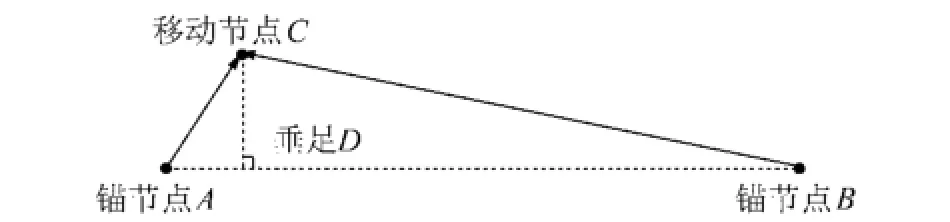
图8 移动节点距离锚节点较近的情况Fig.8 The situation that the mobile node closed to one anchor node
而对于井下宽大巷道,如井下洗煤厂的车库等,横向和纵向的定位精度都具有很大的参考价值,但是由于本方法横向的理论误差在移动节点距离锚节点比较近时很大,所以规定当移动节点非常接近某个锚节点时,自动切换到其他在这种情况下定位精度较高的定位方法,所使用的方法必须能够在本定位方法中锚节点的铺设方式下实现,可知已有的方法和文献中有很多这种定位方法,如文献[12,15]等。
移动节点很接近某个锚节点表现为接收到某个锚节点信号的信号强度很大,可以设置适当的信号接收强度门限值,判断移动节点是否在距离某个锚节点很近的位置。
作移动节点接收锚节点信号的信号强度与平均定位误差的关系如图9所示。
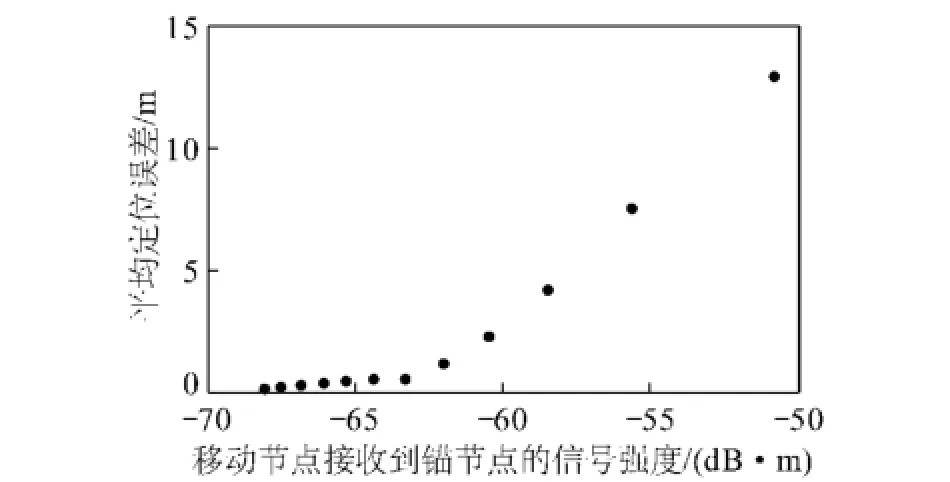
图9 接收锚节点的信号强度与平均定位误差的关系Fig.9 The relationship between the RSSI of anchor node and average localization error
从图9中可观察到,当信号接收强度下降到-57 dB·m时,平均定位误差在3 m左右,可以反推对应的移动节点与锚节点的距离为7 m左右,当信号强度升到-57 dB·m以上时,定位效果下降显著,因此可以以-57 dB·m为门限值。
7.2 加入环境变量的仿真
考虑CC2420是目前应用最广泛的2.4 GHz无线传感器节点芯片,其最大标准发射功率为-45 dB·m,接收灵敏度为-94 dB·m,所以采用煤矿井下2.4 GHz无线电波传输模型[15],各锚节点的发射功率相同,为-45 dB·m。为使仿真算法更接近实际应用,使用蒙特卡罗仿真法[16],在矩形区域内随机取10 000个移动节点位置作为仿真点,取其统计平均值作为最终结果。
使路径衰减指数δ控制在1.1~3.0 s,图10为平均定位误差在巷道纵向的分布情况,从图中可以观察到,平均定位误差基本控制在5 m以内,并且大部分在4 m以内,可以满足煤矿井下的应用,且定位误差在两端和中间很小,其他部分较大,此规律可以为以后进一步的优化设计提供依据。
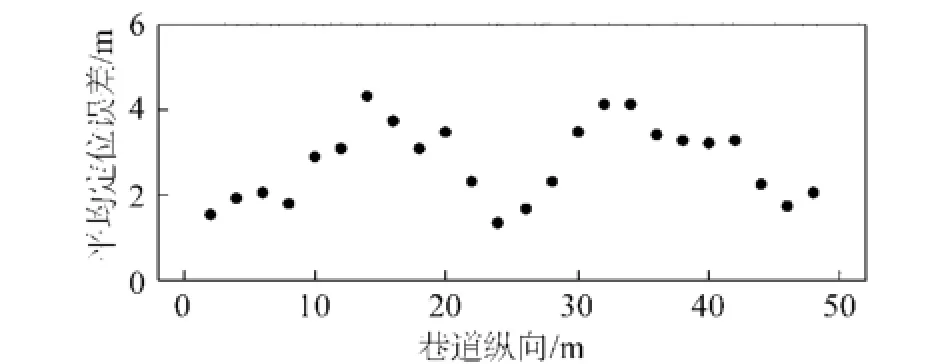
图10 平均定位误差在巷道纵向的分布情况Fig.10 The longitudinal distribution of average positioning error in roadway
使δ控制在1.1~3.0变化,δ每次增加0.2,每次进行1 000次仿真实验,得到的平均定位误差、最大定位误差和标准差见表1。

表1 δ不断增大的仿真结果Table 1 The simulation results under the increasing of δ
由表1可以看出路径衰减指数在0.1~1.3变化波动时,本定位方法能得到5 m以内的平均定位误差。
8 结 论
(1)基于距离约束的井下目标定位方法充分利用了两个锚节点之间固定不变的距离,以这个距离为约束条件,通过适当的近似运算,可以提高测距及定位精度。
(2)基于距离约束的井下目标定位方法在移动节点距离锚节点很近时,横向定位精度下降显著,但依据锚节点的布设方式,可以使用能够在本定位方法中锚节点的铺设方式下实现较高精度定位的方法作为补充方法。
(3)基于距离约束的井下目标定位方法纵向定位精度高,可以直接应用于狭窄巷道内,只取纵向定位坐标;在宽大巷道内或井下车库等,可以通过设定适当的信号接收强度门限值,灵活切换定位方法,得到高精度的定位效果。
(4)当移动节点接收信号强度大于-57 dB·m时,定位效果下降显著,可以以-57 dB·m为门限值,灵活切换定位方法,多种定位方法配合使用,可以显著提高定位精度。
[1] 孙继平.煤矿安全生产理念研究[J].煤炭学报,2011,36(2): 313-316.
Sun Jiping.Research on coal-mine safe production conception[J].Journal of China Coal Society,2011,36(2):313-316.
[2] 孙继平.煤矿自动化与信息化技术回顾与展望[J].工矿自动化,2010(6):26-30.
Sun Jiping.Review and prospect of technologies of automation and informatization of coal mine[J].Industry and Mine Automation, 2010(6):26-30.
[3] 彭 刚,曹元大,孙利民.无线传感器网络节点定位机制的研究[J].计算机工程与应用,2004,40(35):27-29.
Peng Gang,Cao Yuanda,Sun Limin.Study of localization schemes for wireless sensor network[J].Computer Engineering and Applications,2004,40(35):27-29.
[4] 王福豹,史 龙,任丰原.无线传感器网络中的自身定位系统和算法[J].软件学报,2005,16(5):857-868.
Wang Fubao,Shi Long,Ren Fengyuan.Self-localization systems and algorithms for wireless sensor networks[J].Journal of Software, 2005,16(5):857-868.
[5] He T,Huang C,Blum B M.Range-free localization schemes in large scale sensor networks[A].Proceedings of the 9thAnnual International Conference on Mobile Computing and Networking[C].San Diego:ACM Press,2003:81-95.
[6] Capkun S,Hamdi M,Hubaux J.GPS-free positioning in mobile Ad-Hoc networks[A].Proceedings of the 34thHawaii International conference on System Sciences[C].2001:3481-3490.
[7] Cheng X,Thaeler A,Xue G,et al.A time-based positioning scheme for outdoor sensor networks[A].INFOCOM[C].2004:2685-2696.
[8] Niculescu D,Nath B.Ad Hoc positioning system(APS)using AOA [A].INFOCOM[C].2003:1734-1743.
[9] GirodL,Estrin D.Robust range estimation using acoustic and multimodal sensing[A].Proceeding of IROS[C].2001:1312-1320.
[10] 杨 维,周嗣勇,乔 华.煤矿安全监测无线传感器网络节点定位技术[J].煤炭学报,2007,32(6):652-656.
Yang Wei,Zhou Siyong,Qiao Hua.Node localization in wireless sensor networks for coal mine security monitoring[J].Journal of China Coal Society,2007,32(6):652-656.
[11] 郜丽鹏,朱梅冬,杨 丹.基于ZigBee的加权质心定位算法的仿真与实现[J].传感技术学报,2010,23(1):149-152.
Gao Lipeng,Zhu Meidong,Yang Dan.Simulation and implement of weighted centroid localization algorithm based on ZigBee[J].Chinese Journal of Sensors and Actuators,2010,23(1):149-152.
[12] 刘晓文,王振华,王淑涵,等.基于RSSI算法的矿井无线定位技术研究[J].煤矿机械,2009,30(3):59-60.
Liu Xiaowen,Wang Zhenhua,Wang Shuhan,et al.Study of WSN localization based on RSSI in coal mine[J].Coal Mine Machinery, 2009,30(3):59-60.
[13] 乔钢柱,曾建潮.信标节点链式部署的井下无线传感器网络定位算法[J].煤炭学报,2010,35(7):1229-1232.
Qiao Gangzhu,Zeng Jianchao.Localiz ation algorithm of beacon nodes chain deployment based on coal mine underground wireless sensor networks[J].Journal of China Coal Society,2010,35(7): 1229-1232.
[14] 张荣立,何国纬,李 铎.采矿工程设计手册[M].北京:煤炭工业出版社,2003:2553-2571.
Zhang Rongli,He Guowei,Li Duo.Mining engineering design manual[M].Beijing:China Coal Industry Publishing House,2003: 2553-2571.
[15] 张志斌,徐小玲,阎连龙.基于Zigbee井下无线传感网络的定位方法[J].煤炭学报,2009,34(1):125-128.
Zhang Zhibin,Xu Xiaoling,Yan Lianlong.Underground localization algorithm of wireless sensor network based on Zigbee[J].Journal of China Coal Society,2009,34(1):125-128.
[16] Nerguizian C,Despins C L.Rdio-channel characterization of an underground mine at 2.4GHz[J].IEEE Trans on Wireless Communications,2005,4(5):2441-2453.
Underground target location method based on distance constraint
LIU Xiao-yang1,LI Zong-wei2,FANG Ke1,TIAN Zi-jian1
(1.School of Mechanical Electronic&Information Engineering,China University of Mining and Technology(Beijing),Beijing 100083,China;2.Safety Equipment and Technology Branch,China Coal Research Institute,Beijing 100013,China)
The underground coal mine roadway is long and narrow strip structure,signal attenuation is bigger,the existing target positioning methods and techniques cannot be directly applied in underground,the existing mine target mainly adopts ranging method based on time and the signal strength,and these methods are not gave the underground coal mine roadway strip structure characteristics,positioning error is bigger.On the basis of the mine roadway strip structure characteristics,the fixed distance between two anchor nodes was viewed as a constraint condition.An underground target location method was put forward in this paper based on this condition.Every four anchor nodes constituted a rectangular area of which the diagonal’s length was known.A formula of the ratio of the distances between a mobile and two anchor nodes on the diagonal of the rectangular area was got through the ranging method based on RSSI,and then through the vector formula of vertical vector,a vector equations was acquired.The two-dimensional coordinates was obtained by solving the equations.Simulation experiments show that this method can effectively reduce the positioning error.
distance constraint;coal mine;target location;RSSI
TD76
A
0253-9993(2014)04-0789-06
刘晓阳,李宗伟,方 轲,等.基于距离约束的井下目标定位方法[J].煤炭学报,2014,39(4):789-794.
10.13225/j.cnki.jccs.2013.0898
Liu Xiaoyang,Li Zongwei,Fang Ke,et al.Underground target location method based on distance constraint[J].Journal of China Coal Society,2014,39(4):789-794.doi:10.13225/j.cnki.jccs.2013.0898
2013-06-27 责任编辑:许书阁
国家自然科学基金资助项目(51134024);中国矿业大学(北京)大学生创新创业训练资助项目(Z20131402,Z20131403)
刘晓阳(1968—),女,山西临汾人,高级工程师,博士。E-mail:liuxy1225@163.com
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
导航定位学报(2022年4期)2022-08-15
导航定位学报(2021年4期)2021-08-29
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
科技视界(2016年16期)2016-06-29
