海底浅表层沉积物原位声学测量方法探讨
2014-06-01 12:30:11邹大鹏阚光明龙建军
海洋学报 2014年11期
邹大鹏,阚光明,龙建军
(1.广东工业大学机电学院,广东广州 510006;2.国家海洋局第一海洋研究所,山东青岛 266061;3.国家海洋局海洋沉积与环境地质重点实验室,山东青岛 266061)
海底浅表层沉积物原位声学测量方法探讨
邹大鹏1,阚光明2,3,龙建军1
(1.广东工业大学机电学院,广东广州 510006;2.国家海洋局第一海洋研究所,山东青岛 266061;3.国家海洋局海洋沉积与环境地质重点实验室,山东青岛 266061)
研究透射式和折射式两类海底沉积声学原位测量方法,通过分析10种海底浅表层沉积物声学原位测量仪器的特征,指出不同声学原位测量技术对沉积物声学特性测量结果的影响。比较黄海海底浅表层沉积声学原位测量数据与实验室测量结果的差异,分析原位声学测量数据普遍小于实验室测量数据的原因,指出原位测量的作用和重要性。探讨指出海底浅表层沉积物原位声学测量所需要配合发展的其他物理性质原位测量技术。
原位测量;声学;海底沉积物;压缩波;切变波
1 引言
声波在海底的反射、散射、透射以及在沉积物中的传播特性,一直以来是水声学和地声学研究的焦点。海底浅表层沉积物的声学特性则是这一系列研究的基础和重点。海底浅表层沉积物是由各种矿物介质颗粒堆积起来的松散(未固结)骨架和充满在骨架孔隙中的底层海水而形成两相介质,或者因为气体的存在而形成三相介质。与上覆海水的声学特性相比,海底浅表层沉积物的声学特性更为复杂和多样。而且因为水动力搬运、重力沉积、生物分解和扰动、地层运动变化等作用,海底沉积物尤其是浅表层的声学特性处于地声性质和物理性质的时间和空间的动态变化中,这既是研究其声学特性的复杂性的原因所在,也一直是产生不同论断且推动持久开展研究的动力所在。在海洋探测和海洋工程活动中,尤其是应用高频声波(此处与地震频率段声波相比较),海底浅表层最初几米的海底沉积物承担着主要角色,是目前理论研究、采样分析、声学测量和实验研究最为广泛的海底沉积物区域[1]。
与传统的沉积物样品采集后开展实验室声学测量方法相比,原位声学测量几乎完整地保持了海底沉积物的物理性质和环境状态,从而获得海底表层沉积物的更为真实的地声特性(声速、声衰减和声阻抗等)[2]。应诸如海底监控、海底测绘、海底沉积物分类、海底资源勘探、海底人类活动目标探测(诸如各种潜器和置底设备、海底沉船)等各种海洋活动的需求,开发了旁扫声纳、多波束、垂直入射声呐等多种声学设备,测量声波频率1~500 k Hz不等,穿入沉积物层的深度也从几毫米到几米不等,同时对应发展了多种海底浅表层原位声学测量仪器[3—16]。本文分析海底沉积声学原位测量的特点和原理;通过研究不同类型的海底沉积声学原位测量仪器的特征,着重探讨沉积物原位声学测量方法及其技术的特点,指出不同声学原位测量技术对沉积物声学特性测量结果的影响;通过分析黄海海底沉积声学原位测量数据与实验室测量结果的差异,指出原位测量的重要性,并探讨指出海底沉积物原位声学测量所需要配合发展的其他物理性质原位测量技术。
2 海底浅表层沉积物声学原位测量方法
海底声学测量的目标是通过高精度的声学遥测,实现高效率地海底对象探测和监控。针对海底浅表层沉积物的声学测量,目前主要方法[17—18]有3种:(1)海底沉积物样品声学特性实验室测量;(2)海底浅表层沉积声学原位测量;(3)海底声学遥测。海底浅表层沉积声学原位测量和样品声学特性的实验室测量都属于点测量,测量效率低,但为目前处于发展阶段的声学遥测方法进行数据分析和解释提供了必要的依据。
2.1 海底浅表层沉积声学原位测量的特点
影响海底沉积物声学特性的主要因素是沉积物的结构状态和结构组成,在具体描述上通常采用体积平均参数如孔隙度、体密度、渗透率、曲折度、孔隙大小、颗粒弹性模量等来解释沉积物的声学特性。在声学测量过程中,如果结构状态和结构组成任何一项发生变化,比如震动导致内部重构,空气进入导致结构组成变化等,由此导致物理参数发生变化,沉积物的声学特性也往往随之发生变化。此外,海底沉积物存在于一定压力和一定温度的半空间环境状态中,这些环境状态也通过影响海底沉积物的物理参数数值而影响这海底沉积物的声学特性[19]。海底沉积物样品声学特性的实验室测量,脱离了原位的环境状态(温度、压力)和半空间状态,同时引入了采样和输运过程的扰动,导致可能出现多种误差。而海底浅表层沉积声学原位测量基本保持了海底沉积物原位环境、半空间和结构(含组成)3种状态,与声学遥测的原位状态一致,因此对声学遥测的解释性最强。
2.2 海底浅表层沉积声学原位测量的原理
海底浅表层沉积声学原位测量原理以声波通过沉积物传播的方式不同分类为两种:透射式和折射式。透射式的海底原位声学测量是声波直接传播在收发换能器之间的海底沉积物中(图1a)。折射式的海底原位声学测量是声波在海水和沉积物界面发生折射后传播在收发换能器之间的海底沉积物中(图1b)。两种不同传播方式的声速和声衰减系数(这里主要指压缩波)通常可以通过以下表达式来计算[20]:

式中,cp和α分别是海底沉积物的声速和声衰减系数,cw是上覆海水的声速,Δt为发射换能器和接收换能器在传播距离上海水和沉积物的传播时间差,d是传播距离,Aw和As分别是同样测量方式下在沉积物和在海水中的接收的声波振动幅值或者频谱幅值。
两种测量原理采用相同的声速和声衰减系数计算公式,但是在具体的信号处理和数据分析中各有不同。在两种测量原理中,引入在上覆海水中(或者某层海水中)测量数据进行分析的目的是:(1)通过两者传播时间求差,在声速计算中去除声学测量仪器的系统延时;(2)通过两者衰减系数求差,去除扩散路径、换能器不匹配等引起的衰减,获得沉积物自身的衰减系数;(3)基于海水的非频散特性,检验原位声学测量仪器的性能和精度,以及校正收发换能器之间的尺寸。

图1 透射式原位声学测量原理(a)和折射式原位声学测量原理(b)Fig.1 Principle of transmission based in-situ acoustic measurement(a)and principle of refraction based in-situ acoustic measurement(b)
3 海底浅表层沉积声学原位测量的主要方法和仪器
沉积声学原位测量的主要方法因应用于海底深度、测量尺度、测量频率、测量声波类型、是否同时采样等不同而不同,从而操作方式和实现技术也存在差异。用于浅水(几十米以浅)的沉积物测量,可以由潜水员潜水进行操作;用于深水(大陆坡及深海盆地)的沉积物测量,则需要采用绞车释放能够承受深水压力的原位测量仪器进行水下自动测量。用于沉积物表层测量,仪器设备相对尺寸较小,通常要避免较大的沉积物压入力扰动;用于深度长达几米的沉积物测量则需采用一定的重力贯入(及增加活塞)或者钻削式进入的方式实现。用于沉积物横向测量,通常收发换能器的距离较近,采用透射式测量原理;而用于沉积物纵向测量,收发换能器相对距离较远,采用折射式测量原理。用来测量沉积物切变波传播,需要采用切变波发射换能器和接收换能器。有的在原位测量点开展原位测量后同时采集沉积物,有的在原位测量后再次投放采样器进行沉积物采样。以下按照透射式和折射式两类原位声学测量原理将测量方法和仪器也分为两类。
3.1 透射式海底浅表层沉积声学原位测量方法和仪器
纵断面测绘仪(ARL/UT profilometer)[3]如图2所示,仪器结合活塞采样器,收发换能器安装于活塞采样器的头部,一边贯入海底沉积物中一边测量海底沉积物的声学特性。采用一发一收声学换能器组,测量主频为200 k Hz,测量横向沉积物的压缩波传播。可以用于接近7 000 m的海水深度测量。测量沉积物样品深度可以达到海底表面以下12 m。采用重力加活塞方式将声学换能器插入海底沉积物,可以直接实现原位声学测量点的沉积物样品采集,以用于进行实验室进一步分析。

图2 纵断面测绘仪结构示意图Fig.2 Schematic diagram of ARL/UT profilometer
原位沉积物声学测量系统(ISSAM)[4]如图3所示,采用单发多收或者多发多收式声学换能器阵列,可以测量横向沉积物的压缩波和切变波,压缩波测量主频为60 k Hz,切变波测量频率范围为250~1 500 Hz,测量沉积物深度为海底表面以下0.3 m。采用重力将声学换能器插入海底沉积物。
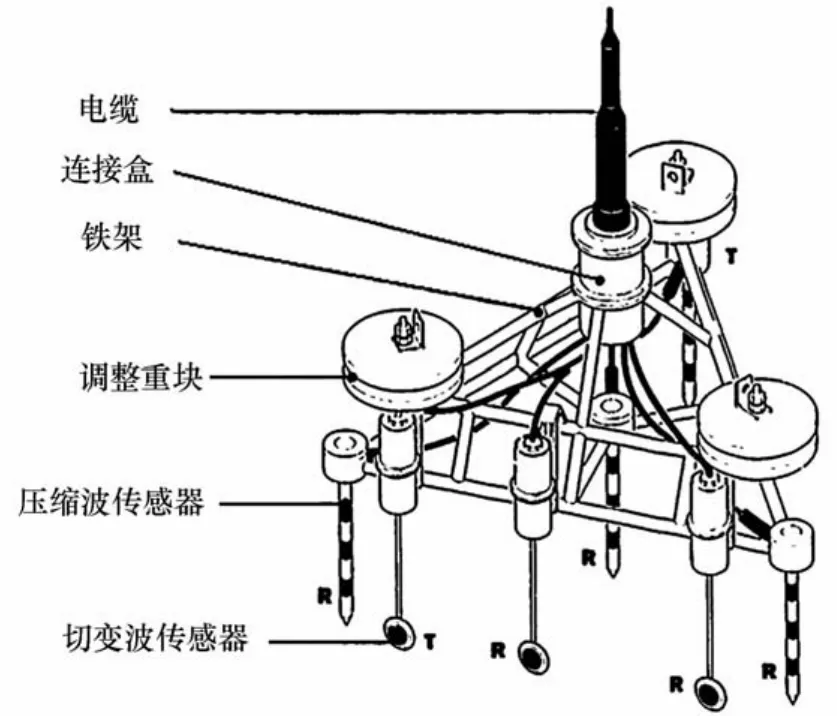
图3 原位沉积物声学测量系统结构示意图Fig.3 Schematic diagram of ISSAM

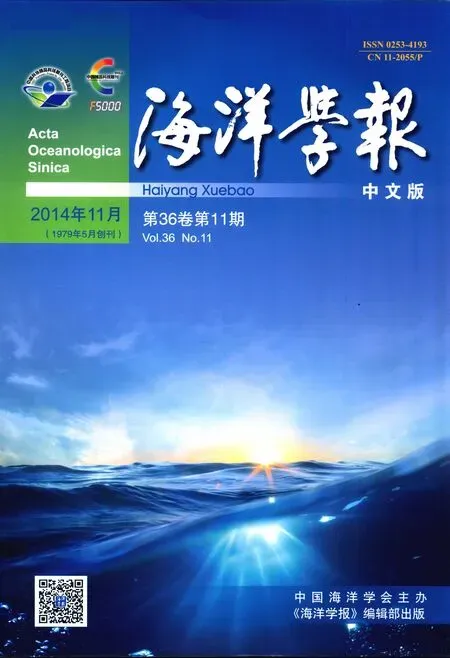
图4 沉积物声学物理性质测量仪器结构示意图Fig.4 Schematic diagram of SAPPA
沉积物声学物理性质测量仪器(SAPPA)[5]如图4所示,该系统既可以测量沉积物中水平方向传播的压缩波,还可以测量水平极化和垂直极化的切变波。压缩波测量采用单发单收的换能器,采用机械重锤锤击的方式将安装有发射和接收换能器的声学探杆贯入到沉积物中,测量主频为10 k Hz,测量深度为海底表面以下1 m。采用专门设计的机械装置在沉积物中产生切变波,使用三分量地震检波器来接收切变波,切变波测量主频为120 Hz。
沉积物探针式声学探测仪(SPADE)[6](探针如图5所示),采用一发一收式声学换能器组,测量横向沉积物的压缩波,测量频率为10~100 k Hz之间的任何频率,可发射调制或者扫频脉冲信号。测量沉积物深度为海底表面以下1 m。由潜水员将声学换能器插入海底沉积物。
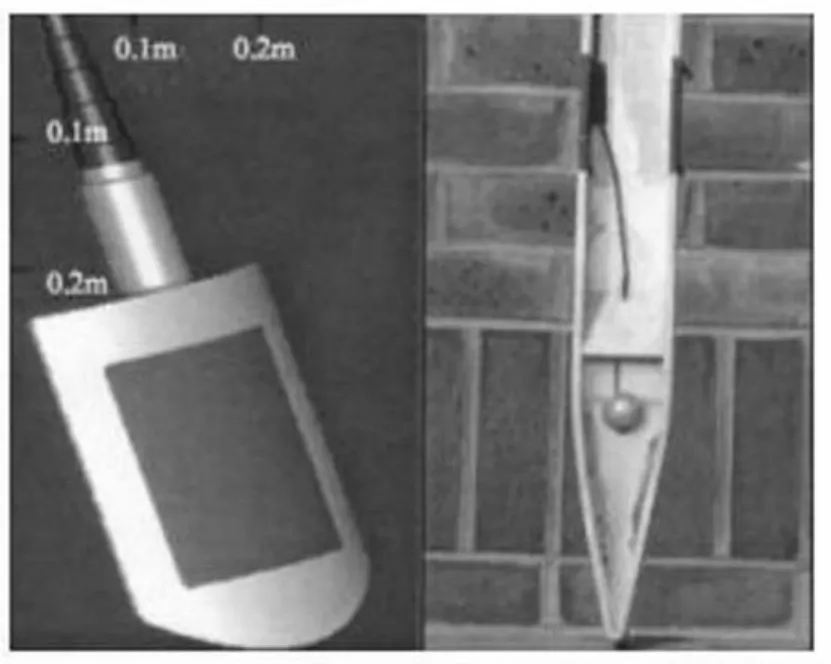
图5 沉积物探针式声学探测仪探针结构示意图Fig.5 Schematic diagram of SPADE
衰减阵列仪器(Attenuation array)[7]如图6所示,采用两发(不同频率段)两收式声学换能器阵列,测量横向沉积物压缩波,测量频率范围是40~300 k Hz,间隔20 k Hz,测量沉积物深度为海底表面以下0.1 m。由潜水员潜入水下将声学换能器压入海底沉积物。
图6 衰减阵列仪器结构示意图Fig.6 Schematic diagram of Attenuation array
基于液压驱动贯入的自容式海底沉积声学原位测量系统[8]如图7所示。该系统采用一发三收声学换能器组来测量测量在水平方向传播的声速和声衰减系数。系统测量频率为30 k Hz,可发射矩形脉冲和正弦信号波,测量沉积物深度为海底表面以下1 m,最大工作水深为500 m。系统采用组合式液压驱动装置将安装有声学换能器的声学探杆匀速贯入海底沉积物中,减少了对沉积物的扰动。
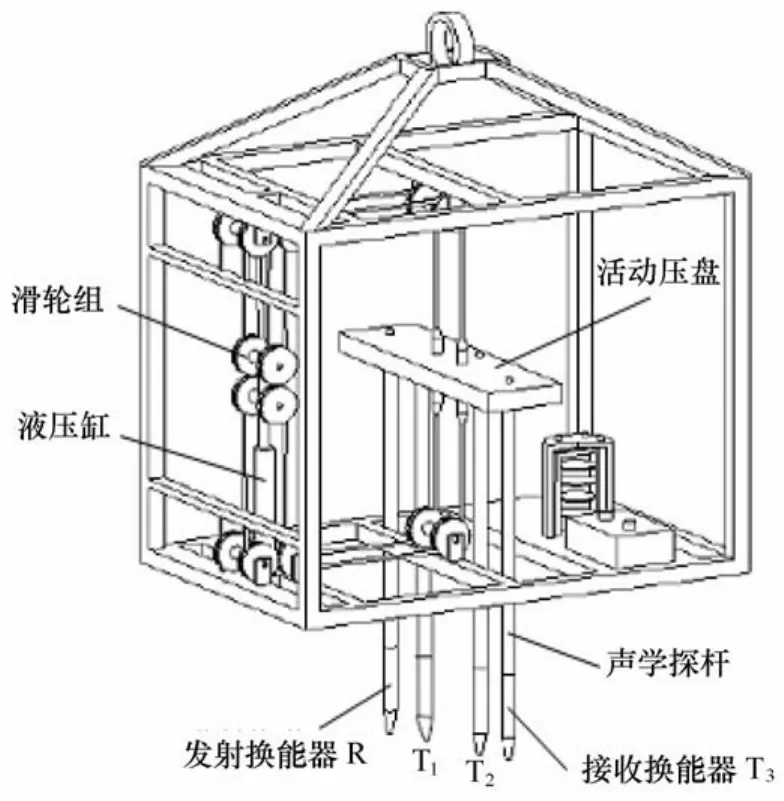
图7 自容式原位沉积物声学测量系统结构示意图Fig.7 Schematic diagram of self-contained in-situ sediment acoustic measurement system
3.2 折射式浅表层海底原位声学测量方法和仪器
声学长矛(Acoustic Lance)[9]如图8所示,采用一发多收换能器阵列,测量主频为8 k Hz,测量纵向沉积物的压缩波特性。测量沉积物样品深度可以达到海底表面以下5 m。工作深度可以达到6 000 m水深。采用重力或者加活塞方式将声学换能器插入海底沉积物,可以实现原位测量点沉积物样品直接采集,进行实验室进一步分析。
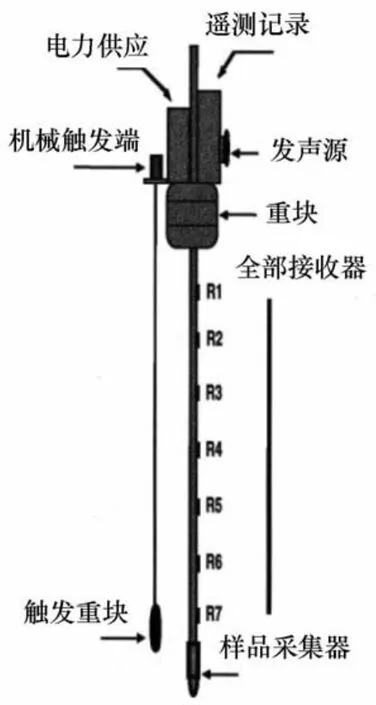
图8 声学长矛结构示意图Fig.8 Schematic diagram of Acoustic Lance
遥感操作潜器(ROV)控制声发射和埋入声学接收阵列[10]如图9,采用一发多收换能器阵列,测量主频范围是10~100 k Hz,测量纵向沉积物的压缩波特性。接收声学换能器阵列由潜水员埋入海底沉积物中。测量沉积物深度可达海底表面以下0.8 m。除可以研究声传播,同时可以研究折射和散射。

图9 遥感操作潜器控制声发射和埋入声学接收阵列结构示意图Fig.9 Schematic diagram of sound projector controlled by ROV and buried acoustic receiving array
迷你声发射系统(mini-boomer)[11]如图10,采用一发多收阵列,测量主频范围是0.2~1.5 k Hz,测量沉积物纵向压缩波声学特性。测量沉积物深度为海底表面以下0.5 m。接收声学换能器阵列由潜水员埋入海底沉积物中,可以用于研究沉积物折射特性。
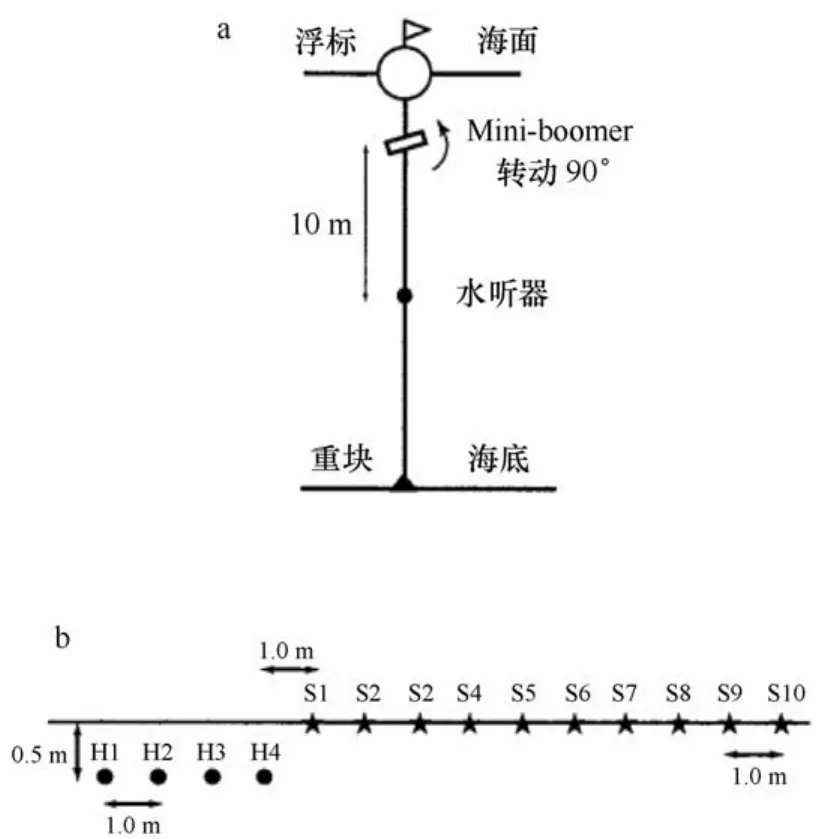
图10 迷你声发射系统结构示意图Fig.10 Schematic diagram of mini-boomer acoustic system
沉积物声速测量系统(SAMS)[12]如图11所示,采用多发一收阵列,接收换能器通过振动进入不同深度的海底沉积物中,多个发射换能器安装在支架及其伸出梁上,在海水中发射信号透过海水沉积物界面传播。测量主频范围2~35 k Hz,测量沉积物纵向压缩波声学特性。测量沉积物深度为可达到海底表面以下3 m。采用钻削或者液压水射流技术将接收换能器插入到海底沉积物中。

图11 沉积物声速测量系统结构示意图Fig.11 Schematic diagram of SAMS
除以上典型海底沉积声学原位测量仪外,还有多频声学长矛[13]、带有海底摄像头和测高计的原位声速和衰减探针(ISSAP)[14]、便携式沉积物原位声学测量系统[15]等各种改进型和简化型原位测量仪。
3.3 海底浅表层沉积声学原位测量方法和技术的特点和比较
由于沉积历史和当前的各种各样因素的存在(见节1和2.1所述),使得海底沉积物在空间分布上是非均匀性、非各项同性的,同时在时间上是处于变化过程中的。沉积声学原位测量的目的之一是发现这种不均匀性、描述这种不均匀性以及研究得出引起这种不均匀性的原因,从而充分认识海底沉积物的特征和监测这种变化。因研究目的不同,沉积声学原位测量方法也采用了不同的测量技术和测量仪器,以获得不同尺度上沉积物的平均声学特性。频率越高,分辨率就越高,研究的沉积物尺度就越小,而对应的沉积物测量距离相应越小。频率越低,分辨率就越低,研究的沉积物尺度就越大,而对应的沉积物测量距离相应越大。低频率原位声学测量的极致应用是海底地震仪(OBS)。
横向测量沿沉积物的水平方向开展,能够研究处于同一沉积时期的测量距离内的沉积物平均声学特性,而纵向测量沿沉积物的纵深方向开展,研究一段深度内不同沉积时期的沉积物的平均声学特性。横向测量往往采用透射式测量原理,纵向测量往往采用折射式测量原理,有些折射式原位测量仪可以用于研究沉积物的折射特性。横向测量的尺度往往小于纵向测量,对应着沉积物特性分辨率相应高于纵向测量。通常而言,这两种测量方式在实验室沉积物样品测量中也存在。由于两者测量的尺度和方向性不同,所以也是引起很多声学测量结果相互比较而存在一定差异的原因之一。
单发单收声学换能器阵列通常采用具有一定带宽的特定主频进行测量,也可以采用宽带换能器通过激发信号的频带调制实现多个主频的测量。多发多收换能器阵列通常是采用宽带换能器实现多个主频带的声学测量。多发多收换能器可以参考单发单收换能器计算一对收发换能器测量路径上的海底沉积物声学特性,由此可以研究多对收发换能器之间的空间路径上海底沉积物的沉积差异。但也通常是基于整个仪器测量区域内的海底沉积物是均匀的假设前提,利用多个收发信号的比较和求差获得区域内的平均声学特性。采用区域平均声学特性和单一路径的平均声学特性是原位声学测量结果互相比较存在差异的一个原因所在。
采用重力(或者加上活塞)贯入或者钻削进入将声学换能器插入海底沉积物中的原位声学测量仪器往往对海底沉积物扰动相对大一些,而采用液压匀速压入式以及潜水员缓慢压入式对海底沉积物的扰动最小,甚至可以忽略。但是也因为压入力有限的原因,后者操作的深度往往有限,前者极致情况下是大洋钻探中实施的测井技术,可以测量到钻探可以达到深度的沉积物层的声学特性。扰动对沉积物的声学特性影响程度的大小,一直以来难以准确评价,如同实验室声学测量的样品还存在的输运和分割过程的扰动事实,这些因素都会产生海底沉积物的原位实际声学特性的误差。但是研究人员都尽量通过各种减小扰动的方法或者技术,期望获得更真实状态的沉积物声学特性。这是海底沉积声学原位测量在这个方面优于实验室声学测量的一个先决条件。
考虑到多数影响声学特性的物理参数无法开展原位测量,因此沉积声学原位测量过程中,或者同时采集测量点的样品如纵断面测绘仪、声学长矛,或者原位测量后释放采样器在同一点采集沉积物样品后在实验室分析沉积物的物理性质。同一测量点上的样品采集具有为沉积声学原位测量数据的解释和分析提供直接依据的突出优点,而沉积声学原位测量与海底沉积物采样分次操作的方式,会因为水流运动出现原位测量点和采样点偏离的现象,在一定程度上是虽为同一站位采集样品但实验室声学测量和原位测量声学测量比较,在结果上存在差异的一个原因,尤其是海底沉积物存在着较大的不均匀性时。
沉积物的切变波在描述沉积物的土工学特性和辨识沉积物中储藏的资源非常重要。以折射式测量原理的原位测量方法因海水阻隔无法直接实现海底沉积物的切变波的测量,而在透射式测量原理中的原位测量方法通过增加专用的切变波测量声学换能器获得较高信噪比的切变波测量。
4 黄海开展的原位声学测量分析
在我国黄海海域南部,应用基于液压驱动的自容式原位沉积物声学测量系统[15](见图6)测量黄海大陆架海底沉积物,并通过重力柱状采样器或者箱式采样器获得相同站位的样品进行物理性质参数测量和实验室声学特性测量。原位声学测量与实验室声学测量结果比较如图12所示,实验室测量的声速普遍高于原位测量的声速。
考虑到测量区域海水深度一般不超过70 m,投放时间较快,原位测量和采样点的偏离差距较小。采用液压匀速压入,对沉积物的扰动较为均匀而小,而且采样扰动和输运振动对海底沉积物因类型(如砂质粗糙坚硬、粉砂质精细而致密、黏土质胶粘而柔软)差异而影响性不同,具有一定的随机性,通常不具有系统性的误差和趋势。鉴于水深较浅,原位压力(小于7 atm,1 atm为101 325 Pa)和实验室压力(1 atm)变化较小,对沉积物物理性质影响可以忽略。样品实验室声学测量属于纵向测量(样品长度约为0.3~0.7 m,0.1 m直径内的海底沉积物),原位声学测量属于横向测量(海底表面以下0.5 m的1 m2区域内的海底沉积物),从普遍的沉积规律来说沉积物随着深度增加而存在压实特性,根据孔隙度、密度、弹性模量等物理性质与深度的相关性以及与声速的相关性分析,应该存在原位测量声速高于实验室测量声速的系统特性。但本区域的沉积物样品的分层和压实作用并不明显[16],所以这种系统性特性应该不存在。以上因素分析表明,沉积物的原位声学测量和实验室声学测量应该为一种随机性的对应分布。图12显示实验室测量声速值普遍高于原位测量声速值,呈现出系统性的规律。根据比较两种方法的测量状态的温度,可以发现随着测量温度增大,这种声速差和温度呈现出了正相关如图13。这与温度对海底沉积物声速正相关的影响结果的研究相趋同[21]。以上原位声学测量结果和实验室声学测量结果比较表现出明显的差异,应用实验室声学测量结果表述原位声学测量结果必须进行一定的校正如采用Hamilton校正方法[19],但是这种方法也只能够校正满足一定规律的温度影响性,而对其他的诸多存在的影响因素无法校正。

图12 黄海浅表层沉积物原位声学测量结果和采样样品实验室测量结果比较Fig.12 Comparison of in-situ measurement results with laboratorial measurement results of surface sediments in the Yellow Sea
5 讨论和结论
海底原位声学测量技术和仪器虽然多样,但是其测量结果通常都具有如下特点:(1)对应测量距离内海底沉积物的平均声学特性;(2)对应为海底沉积物存在原位环境状态的综合声学特性。以上两个特点存在,使得各个测量点的原位声学测量结果所揭示的是局部区域的、测量当前状态下的海底沉积物声学特性,当应用原位声学测量数据时尤其是采用各个区域、不同研究者得出声学特性与其他影响参数的经验关系式时,应该清楚其存在着如同应用实验室声学测量数据得出的经验关系一样具有一定的局限性。但即使如此,相比实验室声学测量数据所揭示海底沉积物,原位声学测量数据的误差更小、更准确、更真实。当应用多种原位声学测量声学仪器时,如前所述,因测量仪器精度、测量技术和数据处理方法的差异而得到的沉积物声学特性结果必然存在一定的差异,但是这种差异与沉积物整体声学性质上并不违背,而是在整体声学特性趋势线上体现出了一定误差范围内的波动性。

图13 实验室测量结果与原位测量结果声速差与实验室测量温度关系Fig.13 The differences in sound speed between insitu measurement results and laboratorial measurement results and its relationship with measured temperatures
日益广泛开展的声学遥测更加需要原位声学测量结合,在SAX99[10]和SAX04[22]这些规模较大的海底声学集成实验中,都将原位声学测量与声学遥测结合在一起深入探寻海底沉积物的真实状态的声学特性。与此同时,开展海底沉积物原位科学研究也要求并催生结合使用并发展声学特性以外的其他参量的原位测量仪器:
(1)测量原位底层海水的温度、压力和盐度等的温盐深测量仪器(如CTD);
(2)测量沉积物的孔隙度、密度、压缩系数和渗透率等的物理参数原位测量仪;
(3)测量沉积物的抗剪力和抗压强度等的土工力学参数原位测量仪;
(4)测量原位测量仪器运动状态、倾斜程度、与底质接触情况等的原位状态检测仪。
为了进一步清晰海底沉积物的声学特性,尽可能的实现海底原位声学测量和沉积物采样同时进行,以及采用海底可视技术监控原位测量过程等。
致谢:本文研究得到了美国华盛顿大学应用物理实验室(APL)声学系提供的资料和Jie Yang博士提供的SAMS图片,在此表示感谢!
[1]Jackson D R,Richardson M D.High-Frequency Seafloor Acoustics(The Underwater Acoustics Series)[M].New York:Springer,2007.
[2]邹大鹏,阎贫.海底沉积物声学原位测量方法与南海天然气水合物勘探的应用研究[J].海洋技术,2011(4):70-73.
[3]Tucholke B E,ShirleyD J.Comparison of laboratory and in situ compressional-wave velocity measurements on sediment cores from the western North Atlantic[J].Journal of Geophysical Research:Solid Earth(1978-2012),1979,84(B2):687-695.
[4]Barbagelata A,Richardson M,Miaschi B,et al.ISSAMS:an in situ sediment acoustic measurement system[C]//Hovem J M,Richardson M D,Stoll R D.Shear Waves in Marine Sediments.Netherlands:Springer,1991:305-312.
[5]Best A I,Roberts J A,Somers M L.A new instrument for making in-situ acoustic and geotechnical measurements in seafloor sediments[J].Journal of the Society for Underwater Technology,1998,23(3):123-131.
[6]Robb G,Best A I,Dix J K,et al.Frequency dependence of acoustic waves in marine sediments[C]//Proceedings of the Sixth European Conference on Underwater Acoustics.Gdansk,Poland:Gdansk University of Technology,2002,792:43-49.
[7]Hefner B T,Jackson D R,Williams K L,et al.Mid-to high-frequency acoustic penetration and propagation measurements in a sandy sediment[J].IEEE Journal of Oceanic Engineering,2009,34(4):372-387.
[8]Kan G M,Liu B H,Zhao Y X,et al.Self-contained in situ sediment acoustic measurement system based on hydraulic driving penetration[J].High Technology Letters,2011,17(3):311-316.
[9]Fu SS,Wilkens R H,Frazer L N.Acoustic lance:New in situ seafloor velocity profiles[J].Journal of the Acoustical Society of America,1996,99 (1):234-242.
[10]Thorsos E I,Williams K L,Chotiros N P,et al.An overview of SAX99:acoustic measurements[J].IEEE Journal of Oceanic Engineering,2001,26(1):4-25.
[11]Best A I,Huggett Q J,Harris A J K.Comparison of in situ and laboratory acoustic measurements on Lough Hyne marine sediments[J].Journal of the Acoustical Society of America,2001,110:695-709.
[12]Yang J,Tang D,Williams K L.Direct measurement of sediment sound speed in Shallow Water’06[J].The Journal of the Acoustical Society of America,2008,124(3):EL116-EL121.
[13]陶春辉,金肖兵,金翔龙,等.多频海底声学原位测试系统研制和试用[J].海洋学报,2006,28(2):46-50.
[14]Mayer L A,Kraft B J,Simpkin P,et al.In-situ determination of the variability of seafloor acoustic properties:an example from the onr geoclutter area[C]//Pace N G,Jensen F B.Impact of Littoral Environmental Variability on Acoustic Predictions and Sonar Performance.Netherlands:Kluwer Academic,2002:115-122.
[15]阚光明,邹大鹏,刘保华,等.便携式海底沉积声学原位测量系统研制及应用[J].热带海洋学报,2012,31(4):135-139.
[16]阚光明,赵月霞,李官保,等.南黄海海底沉积物原位声速测量与实验室声速测量对比研究[J].海洋技术,2011,30(1):52-56.
[17]郭常升,窦玉坛,谷明峰.海底底质声学性质原位测量技术研究[J].海洋科学,2007,31(8):6-10.
[18]吴锦虹,吴百海,刘强,等.基于声波探测海底浅层沉积物特性的方法研究[J].海洋工程,2008,26(1):114-119.
[19]邹大鹏,吴百海,卢博,等.海底沉积物声速实验室测量结果校正的研究[J].热带海洋学报,2008,27(1):27-31.
[20]Richardson M D.Attenuation of shear waves in near-surface sediments[M]//High Frequency Acoustics in Shallow Water.Italy,1997:451-457.
[21]邹大鹏,吴百海,卢博,等.温度对水饱和孔隙介质压缩波速度的影响[J].声学技术,2008,27(4):492-496.
[22]Hefner B T,Jackson D R,Williams K L,et al.Mid-to high-frequency acoustic penetration and propagation measurements in a sandy sediment[J].IEEE Journal of Oceanic Engineering,2009,34(4):372-387.
Methods of in-situ acoustic measurement of seafloor surface sediment
Zou Dapeng1,Kan Guangming2,3,Long Jianjun1
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou 510006,China;2.First Institute of Oceanography,State Oceanic Administration,Qingdao 266061,China;3.Key Laboratory of Marine Sedimentology and Environmental Geology of State Oceanic Administration,Qingdao 266061,China)
In this paper we studied on two methods of seafloor deposition in-situ acoustic detection,i.e.,the transmission measurement and the refraction measurement,analyzed characteristics of 10 kinds of in-situ instruments of seafloor surface sediment acoustic measurement,and discussed the influence of different measurement techniques on the acoustic properties of seafloor sediment.Then,we compared the differences in obtained results between in-situ measurement and laboratorial measurement on the seafloor sediment of the Yellow Sea,analyzed the reason why the in-situ measurement data are generally smaller than laboratorial measurement results.Finally,we suggested that in-situ acoustic measurement is of importance on studying seafloor sediment,and the in-situ measurement techniques for other physical properties need to be improved to match the requirements of in-situ acoustic measurement of seafloor sediment.
in-situ measurement;acoustics;seafloor sediment;compressional wave;shear wave
P733.23
A
0253-4193(2014)11-0111-09
2013-12-18;
2014-03-08。
国家自然科学基金项目(41106030,11174299);国家973项目资助(6131870102);国家海洋局青年基金项目(2012318);基本科研业务费专项资金项目(GY0213G24)。
邹大鹏(1977—),黑龙江省德都县人,副教授,主要从事沉积声学、海洋工程、机电液工程的研究。E-mail:anthonyzou@126.com
邹大鹏,阚光明,龙建军.海底浅表层沉积物原位声学测量方法探讨[J].海洋学报,2014,36(11):111—119,doi.10.3969/j.issn.0253-4193.2014.11.013
Zou Dapeng,Kan Guangming,Long Jianjun.Methods of in-situ acoustic measurement of seafloor surface sediment[J].Acta Oceanologica Sinica(in Chinese),2014,36(11):111—119,doi.10.3969/j.issn.0235-4193.2014.11.013
猜你喜欢
家庭影院技术(2020年6期)2020-07-27 01:37:54
家庭影院技术(2019年1期)2019-01-21 02:25:04
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年10期)2018-11-02 05:35:26
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
中学生数理化·八年级物理人教版(2016年7期)2016-12-24 09:46:57
雷达与对抗(2015年3期)2015-12-09 02:39:00
电源技术(2015年2期)2015-08-22 11:28:12
航空学报(2015年4期)2015-05-07 06:43:32