H∞控制的电子横移伺服控制系统设计
2014-05-25 00:34:26闻霞吴龙
自动化仪表 2014年11期
闻霞 吴龙
(三明学院机电工程学院1,福建 三明 365004;三明机械CAD工程研究中心2,福建 三明 365000)
H∞控制的电子横移伺服控制系统设计
闻霞1,2吴龙1,2
(三明学院机电工程学院1,福建 三明 365004;三明机械CAD工程研究中心2,福建 三明 365000)
针对高速系统中存在的模型不确定性和外部扰动等问题,设计了基于内模原理的H∞高精度控制器。建立的伺服系统的数学模型将混合灵敏度问题转化为H∞控制问题。仿真结果表明,所提出的控制策略不仅具有较强的鲁棒性,而且改善了控制系统的动态性能,能够满足高速经编机要求的高速度、高精度、高响应和高频率启停的横移工艺要求。
经编 电子横移 伺服系统 H∞控制 内模控制
0 引言
经编在纺织工业中具有重要地位,直接关系到服装、家纺、产业用纺织品等行业的发展[1]。经编产品的生产能力直接由经编装备的工艺水平决定。随着现代机械制造、电子和自动控制技术的不断进步,现代经编装备正不断地朝着生产高速化、控制数字化、智能化等方向发展[2]。高速经编机电子横移系统对主轴参数信号的跟随性、抗干扰性能要求苛刻,当前适用于高速经编电子横移系统的软/硬件设计理论、技术仍在探索阶段[3-10],没有彻底突破,还有待深入、系统地研究。伺服控制器是经编机电子横移系统的核心环节,所以对面向横移系统的伺服控制器进行设计和改进显得尤为重要。本文给出了一种基于内模原理的高精度电子横移伺服系统的H∞控制算法,并通过仿真分析验证了算法的有效性。
1 电子横移系统工作原理
由于直线伺服系统价格高昂,目前经编机电子横移系统主要采用旋转交流伺服电机驱动梳栉横移机构。经编机电子横移系统主要由控制装置、驱动装置、检测装置3部分组成[11],其原理如图1所示。

图1 电子横移系统原理图Fig.1 Schematic diagram of the electronic shogging system
①控制装置:系统采用主(上位机)、从(现场主控系统)两层分布式控制结构。现场主控系统可以是PLC、各类高性能嵌入式系统等,用于接收经编机主轴信号、计算并向伺服驱动器发送横移控制信号、加载花型数据以及与上位机通信。
②驱动装置:由伺服驱动器、伺服电机、滚珠丝杠3部分组成。滚珠丝杠将旋转电机的旋转运动转换成直线运动,使梳栉实现往复的“停止-运动-停止”间歇式运动。
③检测装置:由编码器构成,用于检测经编机主轴的位置信号和伺服电机的转速信号,并反馈到控制系统,以便完成高精度闭环控制。
2 伺服系统的数学模型
伺服系统是用来精确地跟随或复现某个过程的反馈控制系统[12]。目前,经编机电子横移系统普遍采用性价比较高的交流伺服系统来驱动梳栉进行横移运动。交流伺服系统结构框图如图2所示。

图2 伺服系统结构框图Fig.2 Structure of the servo system
图2中:u为输入控制信号;ω为电机角速度;φ为输出信号(旋转角度);伺服电机惯量J=11.37 Nms2;系统增益K0=136.44 Nms。设x1=ω,y=x2=φ,x= [x1x2]T,则图2可转化为图3所示状态变量图。

图3 伺服系统状态变量图Fig.3 State variables of servo system
根据图3得到伺服系统状态空间表达式为:

下面介绍基于上述伺服系统模型(1)的状态空间H∞控制方法。
3 H∞控制器设计
3.1 H∞控制基本原理
H∞控制理论是在H∞空间通过某些性能指标的无穷范数优化而获得具有鲁棒性能的控制器的一种控制理论。它的基本思想是:当对研究对象的数学模型G设计控制器时,由于参数的不确定性与变化性,通过设计控制器K,使得K在稳定被控对象的同时使某一目标函数的H∞范数最小。标准H∞控制结构如图4所示。图4中:w为外部输入信号,一般包括指令(参考)信号,干扰和传感器噪声;u为控制信号,同时也是控制器输出;z为被控输出信号,通常包括跟踪误差、执行机构输出信号等;y为测量输出信号,可能是传感器输出级指令信号等;G和K分别为广义被控对象和控制器,前者是系统中给定的部分,后者是需要进行设计的。

图4 标准H∞控制结构框图Fig.4 Structural block diagram of standard H∞control
假设G和K均是用线性时不变系统的传递函数矩阵描述,即G(s)和K(s),G的状态空间实现为:
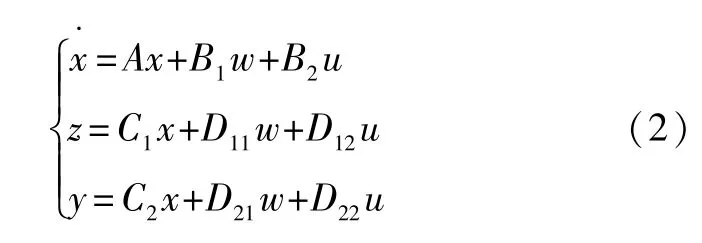
式中:x∈Rn;y∈Rq;w∈Rr;u∈Rp。
相应的传递函数矩阵为:

于是,从w到z的闭环传递函数为:

H∞最优控制问题可以由定义1描述。
定义1(H∞最优控制问题)对于给定的增广被控对象G,求反馈控制器K,使得闭环系统内部稳定且‖Tzω‖∞最小,即:

3.2 内模H∞控制器的设计方法
在实际工程中,许多控制问题都可统一于H∞控制问题[13]。本文将混合灵敏度问题转化为H∞控制问题,采用状态反馈加内模原理的H∞控制器设计。闭环控制系统框图如图5所示。图5中,G和K分别为控制对象和控制器的传递函数;r、e、w和z分别为参考输入信号、误差信号、扰动信号和测量输出信号。

图5 闭环控制系统框图Fig.5 Block diagram of closed-loop control system
图5所示闭环系统的灵敏度函数为S,补灵敏度函数为T。S、T和两者间的相互关系可表达为:

从保证控制对象具有模型不确定性的鲁棒稳定性出发,要求补灵敏度函数T越小越好。但是从式(8)可以看出,它与要求抑制扰动信号w对测量输出信号z的影响相矛盾,这就需要在灵敏度函数S和补灵敏度函数T的选择上做折衷处理。由于实际控制系统中经常是干扰和受控对象的不确定性同时存在,故求解混合灵敏度控制问题非常有意义。
混合灵敏度方法的核心思想是:闭环系统的性能指标可以通过适当地选择灵敏度函数的加权函数阵来达到,而适当选择互补灵敏度函数阵的加权函数可以达到系统的鲁棒稳定性能指标。
H∞混合灵敏度控制系统框图如图6所示。

图6 H∞混合灵敏度控制系统框图Fig.6 Block diagram of H∞mixed sensitivity control system
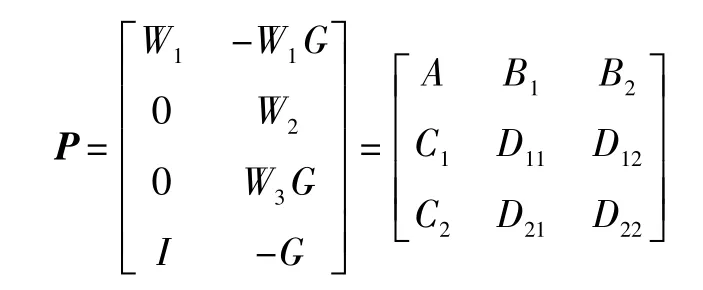
图6中,W1、W2、W3为加权函数,K为控制器。系统的状态方程可描述为:

广义对象及状态空间表达式为:
在这种结构下,从w到z的闭环传递函数阵为:

式中:S为灵敏度函数;T为补灵敏度函数;R=KS。
‖S‖∞越小,意味着干扰引起的系统输出信号的能量越小,也即系统抗干扰能力越强;‖T‖∞越小,意味着由控制器输入的干扰而引起的系统输出能量越小,也即系统鲁棒性能越好。
混合灵敏度控制问题可以转化为H∞控制问题,即混合灵敏度控制问题就是寻找控制器K、稳定化P,且使得‖Tzw‖∞最小。在实际应用中,需要根据工程实际指定3个加权函数W1、W2和W3。在系统设计时,一般常把W2设置为一个很小的值。为抑制系统低频段内干扰和模型误差的影响,应尽量减少S在该频段内的增益,通过整形S的频率特性,使其位于某条曲线之下,可得到较好的跟踪性能。同理,通过整形T的频率特性,使其位于某条曲线之下,可得到较好的鲁棒性能。
内模控制原理是指把外部作用信号的动力学模型植入控制器来构成高精度反馈控制系统的一种设计原理。这个原理指出,任何一个能良好地抵消外部扰动或跟踪参考输入信号的反馈控制系统,其反馈回路必须包含一个与外部输入信号相同的动力学模型。这个内部模型称为内模。加入内模1/s,引入状态变量e1= y-r,则基于状态反馈加内模原理的混合灵敏度H∞控制系统如图7所示。图7中,K0为增益。

图7 加入内模控制后的系统框图Fig.7 Block diagram of the system with internal model control added
4 仿真结果分析
在本文设计过程中,令加权函数W2=0,得到阶跃响应曲线、开环对数频率特性曲线、奇异值曲线分别如图8、图9和图10所示。从图8可以看出,加入内模后的H∞闭环控制超调量相对来说大一些,但控制器可以在0.5 s内实现无静差跟踪,响应速度快,跟踪效果良好。从图9可以看出,加入基于内模的H∞控制校正环节后,可以使开环系统的相频裕度、幅值裕度均变大,稳定性能变好。截止频率右移,系统的响应速度加快,抗干扰能力增强。从图10可知,σ(S)<σ( W1-1),σ(T)<σ( W3-1),设计的内模H∞控制器能够满足系统要求。
经过以上分析可知,将加入内模的H∞控制策略应用于电子横移伺服驱动系统模型(1),实现高精度无静差位置跟踪的设计是合理的,伺服系统的性能得到了较大提高。
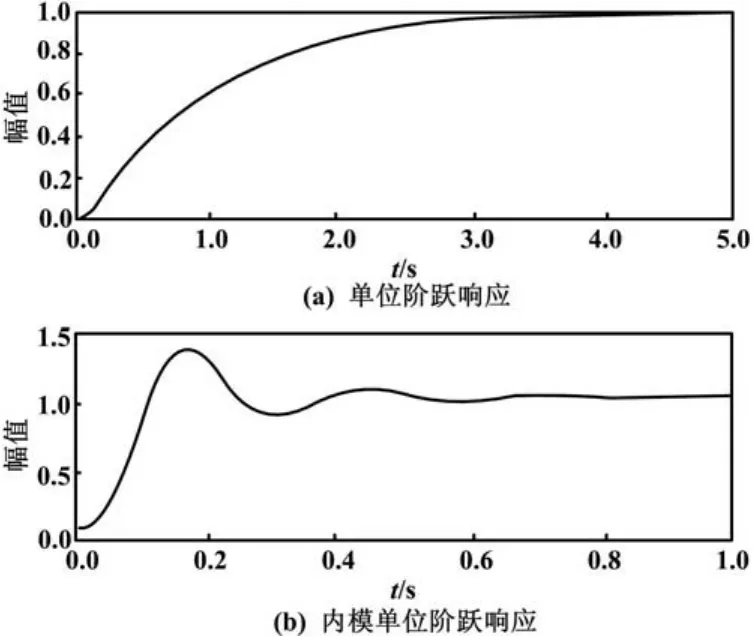
图8 系统的阶跃响应曲线Fig.8 Step response curves of the system

图9 系统开环对数频率特性曲线Fig.9 Logarithmic frequency characteristic curves of the open-loop system

图10 奇异值曲线Fig.10 Curves of singular values
5 结束语
随着控制技术的高速发展,各种新的控制理论、控制方法不断地应用到实践中。根据经编电子横移系统的工作原理,本文详细介绍了一种面向经编机电子横移伺服驱动系统[14-17]的内模H∞状态空间高精度控制策略,并在Matlab环境下进行了仿真试验。通过对试验结果的详细分析,证实了所提出的控制算法的有效性和可行性。
[1] 缪旭红,徐颖.EL型高速经编机的花型设计与产品开发[J].针织工业,2007(12):14-16.
[2] 任雯,胥布工.基于FI-SNAPID算法的经编机多速电子送经系统开发[J].浙江大学学报:工学版,2013,47(10):1712-1721.
[3] 孔震,蒋高明,夏风林.高速经编机电子横移原理探讨[J].针织工业,2007(9):12-14.
[4] 夏风林,蒋高明.基于DSP的经编机电子横移系统探讨[J].针织技术,2009(2):72-74.
[5] 周博,李平,金福江.经编机电子横移系统的模型参考自适应控制[J].上海电机学院学报,2013,16(3):117-124.
[6] 吴永春.经编机梳栉电子横移机构及控制方式的研究[J].机电技术,2011(5):52-54.
[7] 夏风林.基于直线伺服控制的经编电子横移系统研究[D].无锡:江南大学,2010.
[8] 郑宝平,蒋高明,夏风林,等.双PID控制的经编机电子横移系统设计[J].纺织学报,2013,33(5):135-139.
[9] 殷明跃,夏风林,张琦,等.基于前馈控制的经编机横移系统高速定位[J].纺织学报,2011,32(11):126-130.
[10] 郑宝平,蒋高明,夏风林,等.基于转矩控制模式的经编电子横移系统设计[J].纺织学报,2012,33(10):122-127,140.
[11] 王利宁.模糊PID控制算法在电动压力发生器开发中的应用[D].吉林:吉林大学,2010.
[12] 陈鹏展.交流伺服系统控制参数自整定策略研究[D].武汉:华中科技大学,2010.
[13] 褚健,俞立,苏宏业.鲁棒控制理论及应用[M].杭州:浙江大学出版社,1998:49-53.
[14] 郑泽东,李永东.永磁同步电机伺服控制系统的研究现状及发展[J].伺服控制,2008(12):20-22.
[15] 樊东,周国荣.永磁同步伺服电机智能控制器的研制与开发[J].计算机测量与控制,2006,14(3):324-326.
[16] 胡存生.变惯量伺服系统智能控制技术研究[D].南京:南京理工大学,2010.
[17] 杨燕波.基于DSP的无刷直流电机三闭环伺服系统的研究[D].上海:东华大学,2009.
Design of the Electronic Shogging Servo Control System Based onH∞Control
Aiming at the model uncertainty and external disturbance existing in the electronic shogging servo system of high speed warp knitting machine,the high precision controller based on internal model principle is designed.The mathematical model of servo system is established; the mixed sensitivity is transformed into H∞control.The result of simulation shows that the proposed control approach not only has strong robustness and can improve the dynamic performance of the control system,this satisfies the requirements of warp knitting machine,including high speed,high accuracy,fast response and frequently startup and shutdown.
Warp knitting Electronic shogging Servo system H∞control Internal model control(IMC)
TP271+.4
A
福建省科技厅高校产学合作科技重大基金资助项目(编号:2011H6023、2012H6018)。
修改稿收到日期:2014-04-17。
闻霞(1980-),女,2007年毕业于新疆大学机械制造及其自动化专业,获硕士学位,讲师;主要从事机械设计制造及其自动化的研究。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
设备管理与维修(2022年24期)2022-02-08 13:15:42
测控技术(2018年12期)2018-11-25 09:37:44
广东石油化工学院学报(2016年6期)2016-05-17 05:17:33
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
四川电力技术(2015年5期)2015-12-19 11:04:52
中国纺织(2015年7期)2015-09-07 00:13:46
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12