一种相参Radon变换的高速微弱目标检测方法
2014-05-25 00:34刘俊豪陆满君
制导与引信 2014年1期
刘俊豪, 陈 潜, 陆满君
(上海无线电设备研究所,上海 200090)
一种相参Radon变换的高速微弱目标检测方法
刘俊豪, 陈 潜, 陆满君
(上海无线电设备研究所,上海 200090)
针对高速微弱目标回波信号,进行长时间相参积累时出现的跨距离单元走动问题,文章采用基于图像旋转的方法实现相参Radon变换,并提出将信号空间变换到极距-多普勒域进行峰值检测。通过理论分析和数值仿真结果表明,该方法具有较高的积累增益和检测性能,能有效地避免多普勒模糊的影响。
高速目标;距离走动;相参变换;目标检测
0 引言
隐身技术和高性能武器装备的发展,对传统雷达构成严重的威胁,而长时间相参积累技术能有效的对隐身等微弱目标进行检测[1-3]。但在雷达信号长时间相参积累处理中,目标高速运动引起的跨距离走动严重影响目标能量的积累和检测[2,3]。
目前,对跨距离单元走动的补偿主要有距离门拉伸[4]、时域或频域插值移位补偿[5]、Keystone变换等[6]。距离门拉伸法对距离分辨率要求不高,且在处理过程中将不同距离门的噪声“拉”了进来,造成信噪比恶化;插值移位类方法是基于搜索的方法,运算量大,且有插值损失;Keystone变换方法需要对多普勒模糊数进行专门补偿,难以实现对不同模糊数目标的同时相参积累。
Radon变换是一种非相参积累的方法,在“检测前跟踪(TBD)”技术中实现对微弱目标的检测[7],但其存在SNR阈值现象,对低SNR积累效率不高。最新的研究成果中,文献[2]提出的Radon-Fourier变换算法是基于时域移位和寻址运算的方法,需要对起始距离和速度进行联合搜索;文献[8]提出的构造耦合项相位因子方法同样是基于速度搜索的策略,同时需要对速度模糊数进行搜索;文献[9]提出相参Radon变换对微弱目标的检测,其在极距-角度域进行检测,且没有详细的分析过程。
本文采用图像旋转的思路,对相参Radon变换进行分析给出信号处理过程,提出在新的变换空间进行峰值检测,并进行性能分析。
1 目标回波信号模型
假设雷达发射Chirp信号,对于单点目标回波信号一个相参积累间隔(CPI)内雷达接收到的第m个回波基带信号为

式中:t和tm分别为快时间和慢时间[tm=m T,且T为脉冲重复间隔(PRI)];fc为载波频率;c为光速;Ar为点目标的回波幅度;R(tm)=R0+υtm,其中R0和R(tm)分别为t0和tm时刻目标相对于雷达的径向距离;p(t)=rect(t/Tp)exp(jπγt2)为发射的Chirp信号。
式(1)的频域形式:

式中:P(f)为p(t)的频域表示。
上式在距离频域乘以P*(f)进行匹配压缩,得
式中:exp(-j4πfυtm/c)为距离和速度耦合项,引起包络随慢时间走动。
将式(3)转化为时域形式:
从上式可知,基带回波通过脉冲压缩后其包络为sinc函数,其中心频率在2R(tm)/c处。因此,不同的脉冲对应的中心频率不同,当在相参积累时间内相对运动超过一个距离分辨率单元时,即发生了跨距离门走动。
2 相参Radon变换原理及实现过程
2.1 Radon变换原理
Radon变换基本思想是对某个多元函数在给定的路径上进行积分运算,将Radon变换用于信号检测是一种非相参积累方法。
在一个平面内沿某一曲线对g(x,y)做线积分,得到的像就是函数g的Radon变换。设二维平面(x,y)有一任意二维函数g(x,y),则Radon变换可以写成

式中:s表示积分方向;θ为坐标轴围绕原心旋转的角度;ρ为原点到积分直线的距离。上式表明,线性Radon变换是对每一个旋转角度进行投影累加,如图1的虚线部分。
由三角关系知,平面(x-y)和平面(ρ-s)的关系为

将上式代入式(5),于是Radon变换为

采用Radon变换将距离-脉冲域(r-tm域)信号空间变换到Radon参数空间(ρ-θ),把信号空间看作图像来处理,对于匀速运动模型采用Radon变换是对目标的运动轨迹进行寻找,而参数空间的峰值位置对应目标轨迹的截距和斜率。
因此,Radon变换的处理过程:把信号空间r-tm域目标包络轨迹看作图像,首先利用信号空间到参数空间的旋转关系对图像进行旋转;由于旋转θi后,新的位置坐标可能不为整数,而像素值只在坐标整数处有定义,可对旋转的图像坐标进行插值,通常采用双线性内插;旋转后沿垂直方向累加,得到一个旋转角度θi对应的累加值;遍历搜索角度得到(ρ-θ)参数空间,过程如图1所示。最后,在(ρ-θ)空间通过检测峰值确定目标是否存在,并给出峰值对应的目标距离和速度。
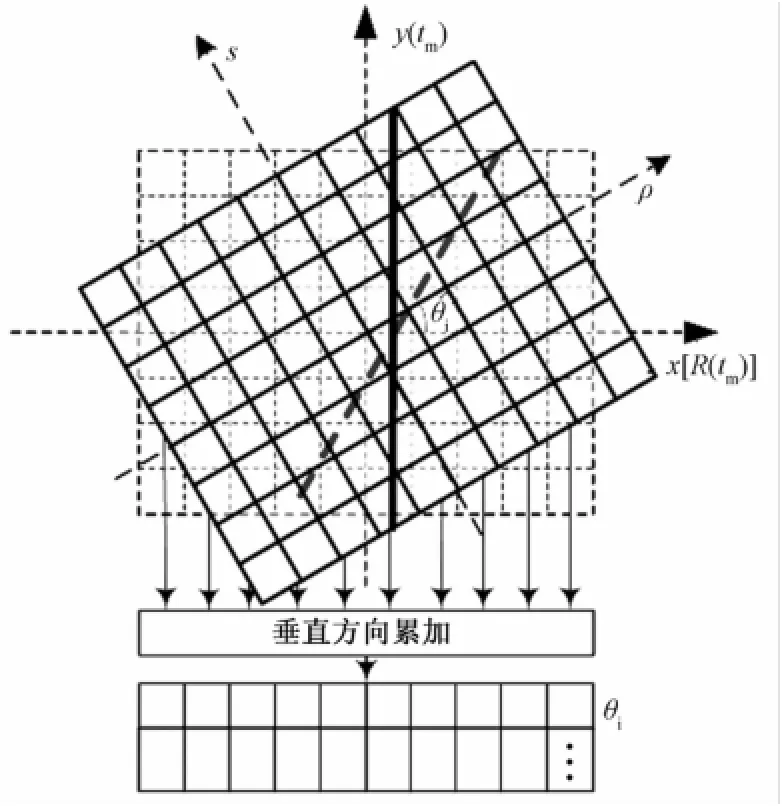
图1 Radon变换信号处理流程
2.2 相参Radon变换算法
在运用Radon变换对信号轨迹进行检测过程中,旋转后直接幅度累加得到积累结果,这样没有充分利用回波信号的相位信息。对信号空间进行旋转过程中,旋转角度与目标相对速度对应,因此每一个角度都有一个相对应的中心多普勒频率。利用该多普勒频率对旋转之后的信号空间进行相位补偿再累加,即利用Radon变换实现相参积累,该过程称为相参Radon变换。
将式(4)表示的信号空间sr,M(t,tm)看作图像,将其角度旋转θ后补偿相位并累加。则相参Radon变换可以表示为

式中:Rc(ρ,fd)表示相参Radon变换积累结果;fd=-2υ/λ,且相对径向速度υ和角度θ的关系为

式中:T为脉冲重复间隔;ΔR为距离分辨率。
事实上,通过Radon变换将轨迹旋转,当轨迹沿垂直方向时,相位仍然随慢时间均匀变化,通过沿列方向FFT操作就可以得到相位校正和相参积累结果。此时得到的是一个旋转角度对应的极距-多普勒域(ρ-fd域),对所有搜索角度得到的(ρ-fd)域的峰值进行选大处理,并通过恒虚警检测得到检测结果,该过程如图2所示。
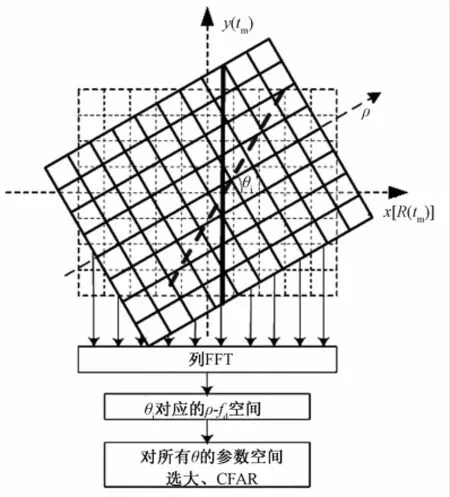
图2 相参Radon变换信号检测处理流程
在(ρ-fd)域进行峰值检测,类似于MTD的峰值检测,具有很好的抑制噪声能力[10]。
如果当信号空间角度旋转θi时,在ρ-fd空间得到最大的峰值,此时fd对应的速度在欠采样情况下存在速度折叠。但是θi对应原信号空间目标轨迹的斜率,故可由θi得到目标的相对速度式(9),这样就避免了对模糊数的搜索。该过程的实现可以表示为

在旋转过程中角度的搜索步长太小会增加运算负荷,而步长太大会跨过最大峰值对应的角度。因此,在围绕信号空间中心进行旋转过程中,考虑旋转一个角度步长Δθ时,最远的点跨越一个距离单元以内,即

式中:N为距离门单元数;M为积累脉冲数;减去“2”是考虑围绕信号空间中心旋转,垂直方向取一半。
3 仿真与分析
设单点目标速度υ=2 000 m/s相向雷达运动,雷达波长3 cm,信号带宽B=10 M Hz,时宽Tp=20μs,采样频率fs=10 M Hz,重频fr= 2 k Hz,相参积累脉冲数M=1 024,距离维单元数M=256。则相参积累时间0.512 s,距离分辨率ΔR=15 m,跨距离单元数为68,因此对应的轨迹斜率为3.80°,设置角度搜索范围为-5°~5°。图像围绕中心进行旋转,由式(11)得到步进为0.112°,故这里取Δθ=0.1°进行搜索,并且仿真过程中加入SNR为-20 dB的高斯白噪声。
在长时间积累过程中高速目标位置引起的跨距离单元走动如图3所示,由于存在严重的距离走动现象,直接将其FFT处理进行相参积累,结果如图4和图5所示。图中可以看出:MTD结果积累幅度不高,检测性能差;而用Radon变换寻找目标轨迹信息,结果如图6所示,可以看出存在积累峰值,但很明显非相参的影响使得噪声平面抬高,造成积累效率不高。
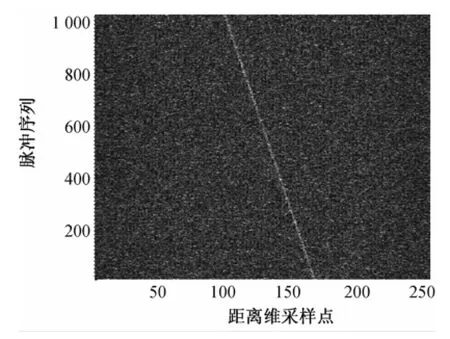
图3 目标包络轨迹
采用本文方法,通过角度搜索对信号空间坐标进行旋转,然后双线性插值,仿真中插值模板为2×2。当包络沿慢时间维对齐时的包络如图7所示。将其作FFT操作得到相参积累结果,如图8所示,得到ρ-fd平面的目标峰值远远高于噪声。
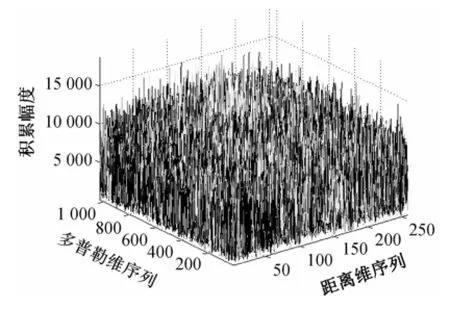
图4 MTD的积累结果
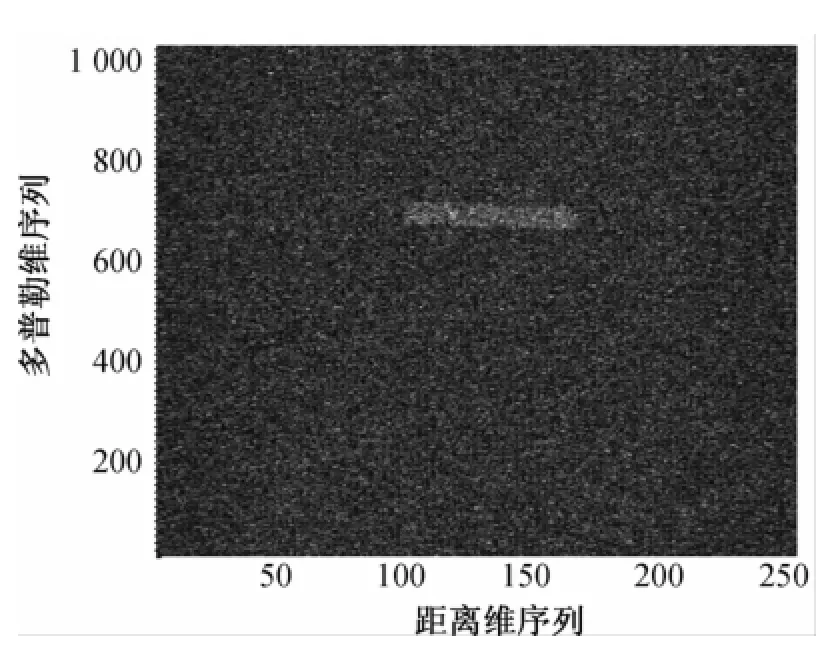
图5 MTD结果俯视图
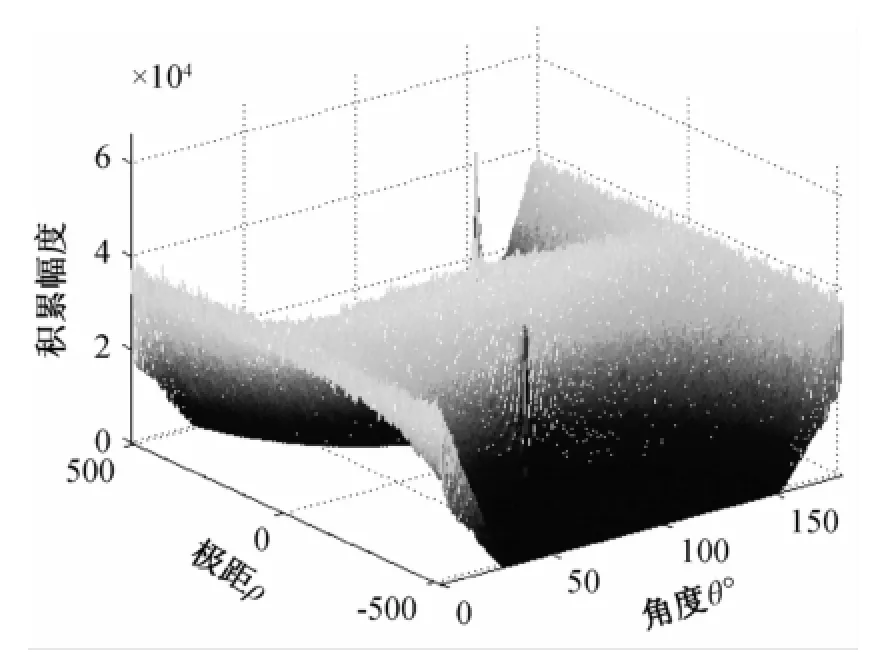
图6 Radon变换结果
根据上面仿真数据,对不同输入SNR进行1 000次Monte Carlo实验,实验结果如图9所示。仿真中MTD方法的脉冲积累个数刚好跨一个距离单元,在图5中包络跨越68个距离单元(18.32 d B),积累能量分散在这些单元内。从图中可以看出,在虚警率为10-6,检测概率为0.9时,采用本文的相参Radon变换方法最小可检测SNR为-32 dB,比MTD方法低15.8 dB,接近理论值18.32 dB,这是由于双线性插值引起的插值损失,并且比Radon变换低8.2 dB,显著提高了检测性能。

图7 信号空间旋转对齐时的包络
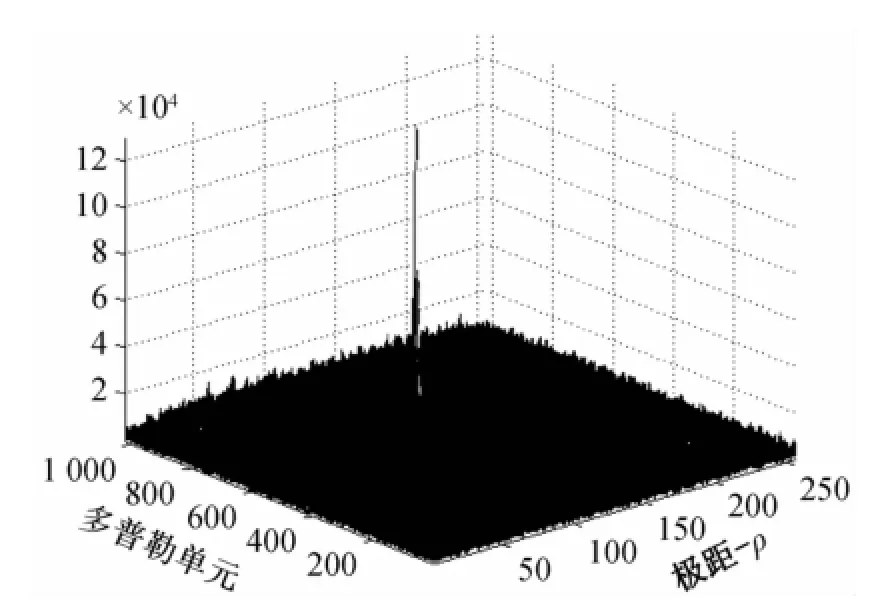
图8 相参Radon变换积累结果(ρ-fd)域
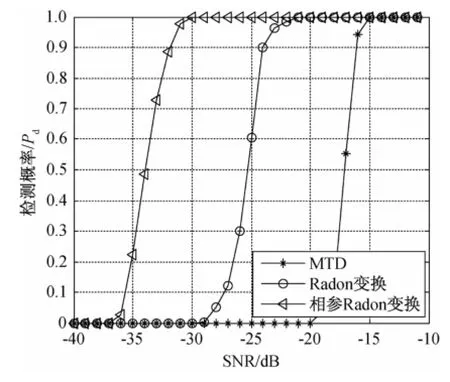
图9 虚警概率为10-6时目标的检测概率
4 结束语
本文在Radon变换的基础上,采用基于图像旋转的方法实现相参Radon变换,并提出在参数空间极距-多普勒域进行峰值检测,得到目标的运动轨迹。从得到最大峰值对应的角度得到目标的速度,避免了欠采样时多普勒模糊的影响。
通过数值仿真表明,该算法具有良好的抑制噪声的能力,并且具有很高的积累增益和较好的检测性能。
[1]保铮.雷达信号的长时间积累[C].第七届中国雷达学术年会论文集.南京:中国电子学会,1999.
[2]Xu J,Yu J,Peng Y,et al..Radon-Fourier Transform for Radar Target Detection I:Generalized Doppler Filter Bank[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1183-1202.
[3]曾建奎,何子述,刘红明.一种基于改进Hough变换的雷达检测方法[J].电波科学学报,2008,23(5):838-840,904.
[4]王俊.微弱目标信号积累检测的包络移动补偿方法[J].电子学报,2000,28(12):56-59.
[5]陈远征,朱永峰,等.基于包络插值移位补偿的高速运动目标的积累检测算法研究[J].信号处理, 2004,20(4):387-390.
[6]张顺生,曾涛.基于Keystone变换的微弱目标检测[J].电子学报,2005,33(6):1675-1678.
[7]Carretero Moya,J.Application of the Radon Transform to Detect Small Targets in Sea Clutter[J].Radar Sonar&Navigation,2009,3(2):155-166.
[8]战立晓,等.一种新的超声速弱目标长时间相参积累算法[J].现代雷达,2013,35(5):47-51.
[9]Javier C M,Javier G M,et al.A Coherent Radon Transform for Small Target Detection[C].IEEE Rader Conference,2009:1-4.
[10]Richards M A(著).邢孟道,王彤,李真芳,等(译).雷达信号处理基础[M].北京:电子工业出版社,2010:187-200.
A Coherent Radon Transform for High-speed and Weak Target Detection Method
LIU Jun-hao, CHEN Qian, LU Man-jun
(Shanghai Radio Equipment Research Institute,Shanghai 200090,China)
Focusing on the across range unit migration during the long-term coherent integration period for high-speed and weak target,echo signal the coherent Radon transform based on image rotation is implemented in this paper,and a novel peak detection method is proposed in Pole Distance-Doppler Domain transformed from Signal Domain.The theoretical analysis and numerical results show that a higher coherent integration gain and better detection performance and the Doppler ambiguity can also be avoided efficiently.
high-speed target;range walk;coherent transform;target detection
TN957
A
1671-0576(2014)01-0036-05
2013-09-28
刘俊豪(1988-),男,在读研究生,主要从事雷达信号处理技术的研究。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
作文小学高年级(2022年3期)2022-04-20
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
北京航空航天大学学报(2016年7期)2016-11-16