扩展的证据理论在遥感影像围填海检测中的应用
2014-05-22 09:09:14初佳兰王常颖
海洋学研究 2014年4期
初佳兰,王常颖
(1.国家海洋环境监测中心,辽宁 大连 116023;2.青岛大学 信息工程学院,山东 青岛 266071;3.国家海洋局 海域管理技术重点实验室,辽宁 大连 116023)
0 引言
中国大陆海岸线1.8万km,拥有滩涂面积380万hm2[1]。海洋经济正在成为我国经济、社会发展的重点,围填海成为我们向海洋开拓生存和发展空间的一种重要手段。传统的现场勘察可以获取较高精度的围填海信息,但其缺点是会耗费大量的人力、物力,时效性也很难满足管理的需求。随着遥感技术的不断发展,高光谱、高分辨率、多时相的海量卫星遥感影像的获取越来越方便,利用遥感影像对围填海进行监测的研究也越来越多。如肖恩等[2]基于长时间序列的多时相遥感数据(Landsat TM/ETM+,MODIS)讨论了围填海活动对海洋环境的影响;刘荣杰等[3]以美国Landsat系列卫星影像为数据源,采用人机交互的方式提取了1982—2013年间3个时段的围填海信息,并进行了时空变化分析;刘琴琴[4]利用3S技术,基于1990年、2000年和2008年的3期遥感影像,通过卫星遥感调查和现场调查结合的方法对广东省的围填海状况进行了分析。传统的目视解译结合现场验证的方法不仅耗费大量的人力,而且由于不同解译人员的经验不同,解译结果往往存在较大差异,研究者们开始尝试用自动检测的方法获取围填海信息。如吴正鹏等[5]基于SPOT-5、WorldView-2等遥感数据,利用计算机解译与目视识别相结合的方法,对天津南港工业区不同时期的围填海信息进行了提取,并开展了定量监测与定性分析;鞠明明等[6]提出了基于面向对象图像分析技术的围填海用海工程遥感监测的技术方法,开发了相应的软件系统,并给出了江苏省海门市滨海新区建设用海的1个实际案例;朱丽丽等[7]以Landsat TM遥感影像为数据源,设计了基于关联规则的围填海检测方法,并在渤海湾开展了实例研究,验证了围填海检测规则的有效性。
因为沿海各种地物混杂,不同海域内,围填海与滩地、植被以及不同反射率的海水交互存在,在传统围填海检测过程中,如果对某海域不够了解,就必然会存在样本的完备性不能很好保障的问题。本文从证据理论的角度出发,将证据理论的扩展[8]应用于围填海检测中,使得即便对该区域的预设样本空间不完备的情况下,也能更好地完成围填海的检测。
1 Dempster-Shafer证据理论
Dempster-Shafer证据理论由Dempster于1967年提出,其学生Shafer将其发展并整理成一套完整的数学推理理论[9]。D-S证据理论可以看作是有限域上经典概率论的扩展,其主要特性是支持描述不同等级的精确度和直接引入了对未知不确定性的描述[10]。
Dempster-Shafer证据理论中最基本的概念是所建立的识别框架,记作Θ。识别框架定义为1个互不相容事件的完备集合,在数据融合中就可以将其看作平台数据库(PDB),这里Θ表示对某些问题的可能答案的1个集合,但其中只有1个是正确的。Bayes推理是对Θ中的元素进行运算,而D-S证据理论则是对2Θ中的元素进行运算。在概率论中,把1个事件A以外的事件均定义为,D-S证据理论对它进行了修正,它不采用事件-概率的概念,而引入了命题-信任度的概念,认为对命题A的信任度和对命题的信任度之和可以小于1[11]。
在证据理论中,若辨识框架Θ中的元素满足互不相容的条件,基本概率赋值函数m:2Θ→[0,1],满足下列条件:

则称m(A)为事件A的基本概率函数。有时也将m称作质量函数。
∀A⊆Θ,定义函数Bel,满足如下条件:

则称Bel为信任函数,称Bel(A)为命题A的信任度。
另外,对于∀A⊆Θ,定义函数Pl,满足如下条件:

则称Pl为似真函数,称Pl(A)为命题A的似真度。
这样,信任度和似真度就概括了证据对具体命题A的关系。它们之间的关系如图1所示,构成一个完整的证据空间。

图1 证据空间示意图Fig.1 Sketch map of D-S evidence space
对于多个证据源,D-S证据理论合成公式定义如下:

2 证据理论的扩展
证据理论擅长解决具有不确定性的实际问题,但是需要注意一点,在使用之前必须保证确定的已知的类别空间[12-18],而事实上,现实生活中往往无法得到完备的样本空间,比如感冒症状组成的类别空间可能是{头疼,咳嗽,流鼻涕,打喷嚏,发烧},但实际上感冒的症状仅仅如此吗?或许专业医师也不能给出所有的症状,即类别空间本身就存在着不确定性。
由前面介绍的证据理论原理可以看出,在应用此种证据理论进行地物分类时,首先必须知道待识别类型的类别空间(即辨识框Θ),其中的类别都是事先人们所知的。而事实上,在对实际应用进行分类时,往往会存在一些人们不知道的类别,在事先定义的类别空间中有可能没有的类别。也就是说,对于类别空间中的空集(Φ),其基本概率分配数不为0,而是大于0,即m(Φ)>0。对于这种情况下,应用D-S证据理论(必须满足m(Φ)=0条件)就无法胜任。因此,需要给出当m(Φ)≥0时的更一般的证据理论,图2为扩展的证据空间示意图,其概率分配函数、信任函数和似然函数的定义,以及证据组合原理如下所述[8]。

图2 扩展的证据空间示意图Fig.2 Sketch map of extended D-S evidence space
(1)概率分配函数
设D为辨识框,领域内的命题都用D的子集表示,则概率分配函数定义如下:
定义1 设函数m:2D→[0,1],且满足:
则称m是2D上的概率分配函数,m(A)称为A的基本概率数,A是D的子集(包括空集)。
(2)信任函数
定义2 对任意的A⊆D,A≠Φ,命题的信任函数Bel:2D→[0,1],且

其中2D表示D的所有子集。
Bel函数又称为下限函数,Bel(A)表示对命题A为真的信任程度。
由信任函数及概率分配函数的定义可以推出:

(3)似然函数
似然函数又称为不可驳斥函数或上限函数,其定义为:
定义3 对任意的A⊆D,A≠Φ,似然函数Pl:2D→[0,1],且

(4)信任函数与似然函数的关系

(5)概率分配函数的正交和
定义4 设m1和m2是两个概率分配函数,则其正交和M=m1⊕m2为:

其中:

如果K≠0,则正交和M 也是一个概率分配函数;如果K=0,则不存在正交和M,称m1与m2矛盾。
扩展的证据理论,给出了其概率分配函数、信任函数和似然函数的定义,以及证据合成算法。而D-S证据理论则成了扩展的证据理论的特殊情况。
3 基于扩展的证据理论的遥感影像围填海检测
假设有n个证据来判别一个像素点为哪种地物,往往会出现这样的情况,其中的一部分证据表明当前地物为c1类,而另一部分证据则表明当前地物为c2类。但是,需要结合n个证据来判断当前点的类别,应该如何判别呢?下面以2个证据为例说明这种情况。
以ETM、环境卫星1B获取的遥感影像为数据源,对2006年9月到2011年4月天津近海的围填海区域进行检测,原始图像如图3所示。
应用关联规则技术,挖掘得出2条围填海区域识别规则如下:
Rule1:如果entropy1>1.837 4,class=“围填海”,否则,class=“海水”;
Rule2:如果entropy3>2.121 35,class=“围填海”,否则,class=“海水”;
分析发现,虽然只有2条规则,即2个证据源,但实际上每条规则能够表达2条证据。
对于Rule1,可以拆分为下面2条证据:
Evidence1-1:如果entropy1>=1.837 4,class=“围填海”;
Evidence1-2:如果entropy1<1.837 4,class=“海水”。
对于Rule2,同样也可以拆分为2条证据:
Evidence2-1:如果entropy3>=2.121 35,class=“围填海”;
Evidence2-2:如果entropy3<2.121 35,class=“海水”。
对于上面的4个证据,通过样本统计,得出相应的基本概率分配函数,如表1所示。

图3 2006年9月(a)和2011年4月(b)遥感影像Fig.3 Remote sensing images of September,2006(a)and April,2011(b)
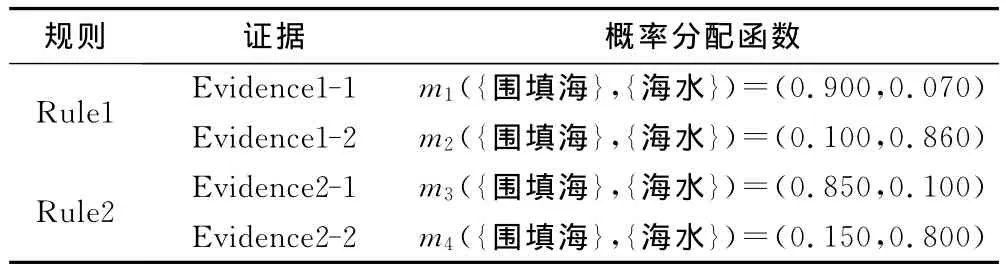
表1 采用扩展证据理论时的规则、证据和概率分配函数的对应关系表Tab.1 Corresponding lists of rules,evidences and probability distribution functions when using extended D-S evidence theory
采用扩展的证据理论将2条规则组合使用,将组合后的概率分配函数值大于0.5的目标类作为检查结果类别,如果不存在大于0.5的目标类别,则被分为“疑似围填海”。组合后的概率分配函数如表2所示,而得到的检测结果如图4所示。
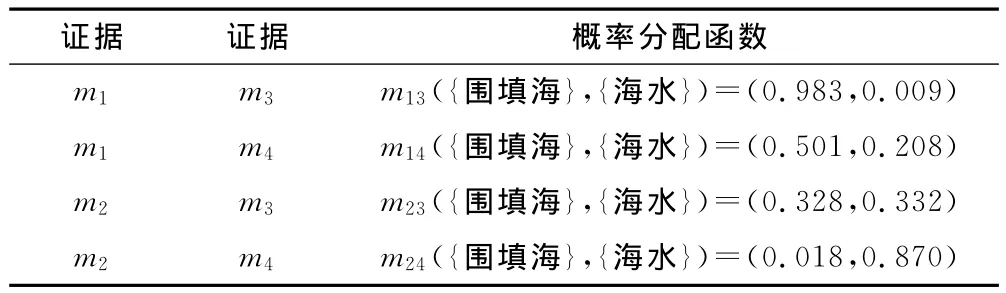
表2 采用扩展证据理论时的2个证据源(4个证据)组合后的概率分配函数Tab.2 Probability distribution functions after combining two sources of evidences(four evidences)when using extended D-S evidence theory

图4 基于扩展的证据理论的围填海检测Fig.4 Reclamation detection result based on extended D-S evidence theory
根据组合后的概率分配函数可得围填海的检测规则如下:
如果entropy1>1.837 4,class=“围填海”;如果entropy1<1.837 4 并且entropy3>=2.121 35,class=“疑似围填海”。
若采用传统的证据理论,因为必须保证不同地物的概率分配函数中的概率和为1,那么规则、证据和概率分配函数的对应关系表如表3和4所示。其计算方法为


表3 采用传统证据理论时的规则、证据和概率分配函数的对应关系表Tab.3 Corresponding lists of rules,evidences and probability distribution functions when using traditional D-S evidence theory

表4 采用传统证据理论时的2个证据源(4个证据)组合后的概率分配函数Tab.4 Probability distribution functions after combining two sources of evidences(four evidences)when using traditional D-S evidence theory
同样,将组合后的概率分配函数值大于0.5的目标类作为检查结果类别。根据表4所示,组合后的概率分配函数可得围填海的检测规则如下:
如果entropy1>=1.837 4,class=“围填海”。
实际上,只是采用规则1进行了检测,并没有利用规则2。检测结果图如5所示。
与原始影像对比,可以看出,采用扩展的证据理论,能够提高检查出目标区域的精度,而且,对于目标类别不是很明显的区域,则分为未知类别,而这一步,传统的D-S证据理论无法做到。
4 结果分析
结合现场踏勘及高分辨率卫星遥感数据,目视解译的结果相对准确,可以作为本文检测方法准确度的验证依据。

图5 基于传统证据理论的围填海检测Fig.5 Reclamation detection result based on D-S evidence theory
根据图4和图5所示的检测结果,可以统计出围填海检测像元数,如表5所示。从检测出的像元个数上看,扩展的证据理论结果与传统的证据理论结果相差不多,按照1个像元为30m×30m换算成面积,目视解译检测面积为62.9km2,本文算法检测面积为85.3km2,传统算法检测面积为87.9km2,本文算法检测的面积更接近目视结果。从检对像元数来看,本文算法检对像元数为67 438个,传统的证据理论检对像元数为50 384个,检对率分别为96.53%和72.12%,本文算法高出传统算法24.41%;从虚警像元数来看,本文算法虚警像元数为27 348,传统的证据理论虚警像元数为47 272个,虚警率分别为28.85%和48.41%,本文算法比传统算法的虚警率低19.56%。由此可以看出本文算法得到的检测结果明显优于传统证据理论算法的检测结果。

表5 扩展的证据理论、传统证据理论与实际情况的精度分析Tab.5 The precision of extended D-S evidence theory、traditional D-S theory with actual situation analysis
5 结束语
本文以基于遥感影像的围填海区域检测为例,应用扩展的证据理论进行围填海与海水分类,由于浅海海水中存在一些水下沙脊或小岛,这些地物类型在预设的类别空间{围填海,海水}中不存在,所以在最终检测结果中将这样的地物类型划分为不确定的未知类别。而这样的分类结果恰恰与实际情况相符,说明扩展的证据理论能够更好地完成围填海的检测,体现了扩展的证据理论解决实际问题的能力,同时,也为全海域的围填海监测提供了新的思路和扩展空间。
(References):
[1]State Oceanic Administration.National marine affairs development plan[EB/OL].http://www.soa.gov.cn/zwgk/fwjgwywj/gwyfgwj/201211/t20121105_5261.html.
国家海洋局.国家海洋事业发展规划[EB/OL].http://www.soa.gov.cn/zwgk/fwjgwywj/gwyfgwj/201211/t20121105_5261.html.
[2]XIAO Kang,XU Hui-ping,YE Na.Preliminary research on the reclamation at the Fujian coast based on the remote sensing imagery[J].Marine Science Bulletin,2013,32(6):685-694.
肖康,许惠平,叶娜.基于遥感影像的福建围填海初步研究[J].海洋通报,2013,32(6):685-694.
[3]LIU Rong-jie,ZHANG Jie,MA Yi,et al.Monitoring and analysis of sea reclamations in Sanshawan Bay based remote sensing in the past 30years[J].Ocean Development and Management,2014(9):17-21.
刘荣杰,张杰,马毅,等.三沙湾30余年来围填海遥感监测与分析[J].海洋开发与管理,2014(9):17-21.
[4]LIU Qin-qin.Survey and analysis of sea reclamations in Guangdong Province based on 3S[D].Qingdao:Shandong University of Science and Technology,2010.
刘琴琴.基于3S技术的广东省围填海调查与分析[D].青岛:山东科技大学,2010.
[5]WU Zheng-peng,XI Ge,WANG Jian-Jie.Reclamation monitoring based on the multi-source remote sensing image——As an example of Tianjin Nangang Industrial Zone[J].Urban Geotechnical Investigation & Surveying,2012(6):77-80.
吴正鹏,奚歌,王健洁.基于多源遥感影像的围填海监测——以天津南港工业区为例[J].城市勘测,2012(6):77-80.
[6]JU Ming-ming,WANG Min,ZHANG Dong,et al.Study on the remote-sensing-based monitoring of reclamation project area by using the object-oriented image analysis technique[J].Marine Science Bulletin,2013,32(6):678-684.
鞠明明,汪闽,张东,等.基于面向对象图像分析技术的围填海用海工程遥感监测[J].海洋通报,2013,32(6):678-684.
[7]ZHU Li-li,SHAO Feng-jing,WANG Chang-ying,et al.The Seafilling land detect method research using remote sensing images based on data mining[J].Journal of Qingdao University:Natural Science Edition,2012,25(2):53-57,66.
朱丽丽,邵峰晶,王常颖,等.基于数据挖掘的遥感影像围填海智能检测方法研究[J].青岛大学学报:自然科学版,2012,25(2):53-57,66.
[8]WANG Chang-ying.Coastal land covers classification of remote sensing images based on data mining technology[D].Qingdao:Ocean University of China,2009.
王常颖.基于数据挖掘的遥感影像海岸带地物分类方法研究[D].青岛:中国海洋大学,2009.
[9]DEMPSTER A.Upper and lower probabilities induced by multivalued mapping[J].Annals of Mathematical Statistics,1967,38(2):325-339.
[10]ZHU-GE Jian-wei,WANG Da-wei,CHEN Yi,et al.A network anomaly detector based on the D-S evidence theory[J].Journal of Software,2006,17(3):463-471.
诸葛建伟,王大为,陈昱,等.基于D-S证据理论的网络异常检查方法[J].软件学报,2006,17(3):463-471.
[11]WANG Yong-qing.Principle and method of artificial intelligence[M].Xi'an:Xi'an Jiaotong University Press,1998:185-190.
王永庆.人工智能原理与方法[M].西安:西安交通大学出版社,1998:185-190.
[12]WANG Chang-ying,ZHANG Jie,MA Yi.Coastal land covers classification of high-resolution images based on dempster-shafer evidence theory[C]//2008International Conference on Computer Science and Software Engineering,2008:1 061-1 064.
[13]SHOYAIB M M,WADUD A A,CHAE O.A skin detection approach based on the Dempster-Shafer theory of evidence[J].International Journal of Approximate Reasoning,2012,53(4):636-659.
[14]ZHANG Da-qiang,GUO Min-yi,ZHOU Jing-yu,et al.Context reasoning using extended evidence theory in pervasive computing environments[J].Future Generation Computer Systems,2010,26(2):207-216.
[15]JIROUŠEK R,VEJNAROVÁJ.Compositional models and conditional independence in evidence theory[J].International Journal of Approximate Reasoning,2011,52(3):316-334.
[16]LIN T C.Decision-based fuzzy image restoration for noise reduction based on evidence theory[J].Expert Systems with Applications,2011,38(7):8 303-8 310.
[17]COHEN Y,SHOSHANY M.Analysis of convergent evidence in an evidential reasoning knowledge-based classification[J].Remote Sensing of Environment,2005,96(3-4):518-528.
[18]MAHDI T,REZA G,REZA E.Knitted fabric defect classification for uncertain labels based on Dempster-Shafer theory of evidence[J].Expert Systems with Applications,2011,38(5):5 259-5 267.
猜你喜欢
铁道通信信号(2020年9期)2020-02-06 09:15:22
数学大王·趣味逻辑(2019年5期)2019-06-13 20:27:43
小学科学(学生版)(2019年5期)2019-05-21 01:00:18
经济技术协作信息(2018年30期)2018-11-22 06:20:24
红土地(2016年3期)2017-01-15 13:45:22
幼儿智力世界(2016年6期)2016-05-14 13:50:51
发明与创新(2016年33期)2016-04-16 16:32:25
新校长(2016年8期)2016-01-10 06:43:59
小雪花·初中高分作文(2015年10期)2015-10-24 04:01:58
商事法论集(2014年1期)2014-06-27 01:20:42