机载相控阵波束指向校正*
2014-05-22 02:25任燕飞
通信技术 2014年4期
任燕飞
(西南电子技术研究所,四川 成都610036)
0 引言
相控阵天线通过电扫描的方式,可以快速实现阵列波束指向调整。相对于传统定向天线,无需机械伺服系统,设计更为简单。同时,由于天线采用多个阵元,可以产生阵列增益,从而有效提高天线的G/T值。这些优势,使得相控阵天线广泛应用到了雷达、通信、声呐、射电天文等领域[1-3]。在航空电子设备中,机载卫星通信也可以采用相控阵天线。通常的相控阵卫星通信天线安装在飞机机背位置,卫星的角度信息通过飞机飞控系统的姿态测量系统和航向测量系统,可以准确计算出来[4]。但在某些特殊情况下,卫星通信天线可能会安装在飞机机翼上,此时,由于飞机机翼在飞行过程中会出现变形,机翼和机身不在是一个刚体结构。飞机飞控系统提供的卫星角度信息由于机翼的变形,已经不再准确,所以,必须采用角度校正手段,克服这种变形造成的波束指向误差,才能保证相控阵天线的正常工作。
1 问题模型描述
1.1 相控阵天线原理
相控阵天线通常分为两大类,一是模拟相控阵,二是数字相控阵。模拟相控阵的相位调整和信号合成通过模拟射频器件构成,而数字相控阵通常在中频或者基带进行数字化,并在数字域实现相位调整和信号合成[5]。但无论采用何种方式,相控阵的基本原理是相同的,都是根据波束指向的角度信息,获得相位调整权矢量,从而实现相控阵的波束合成。
假设阵列由M×N个均匀平面阵列构成,阵元间距为半个波长。如果坐标原点接收信号为s(t)ejωt,则第(m,n)个阵元接收信号可以表示为

式中,s(t)表示信号复基带,而信号相对于原点延时为τmn,则是阵元接收噪声信号nmn(t),服从均匀高斯分布,m=1,2,…,M,n=1,2,…,N。根据平面阵列几何关系,不难确定

式中,矢量k为入射信号波数矢量,与信号波束指向为方位角φ,俯仰角θ有关,该角度又称为信号波达方向DOA,kT表示矢量k的转置,pmn为阵元(m,n)的坐标矢量,即

式中,pxmn,pymn,pzmn分别为矢量pmn在 x 轴,y 轴和 z轴投影值,d为相邻阵元的间距。由于阵列为均匀平面阵,因此阵元间距相等,且矢量pmn在z轴投影值为0。
相控阵通过对每个接收信号进行复数加权,从而调整信号的相位,使得所有阵元接收信号的相位对齐,然后合成输出

式中,“H”表示取权矢量w的共轭转置,x(t)为接收信号的矢量表示。虽然阵列是均匀平面阵,但权矢量w和信号矢量x(t)均为MN维列矢量。理论上,相控阵天线权矢量为

式中,wm表示第m行阵元对应的权矢量,即

而第(m,n)个阵元对应的权值为

可见,根据式(2)~式(4),该权值决定于信号相对于阵面的信号波达方向(DOA,Direction of Arrival)。
1.2 系统坐标设计
为了说明相控阵天线波束指向角度描述方法,定义三个坐标系统。一个是以地球为参考的坐标系XYZ。该坐标系的XY平面与水平面平行,X轴为纬度方向,指向北方,Y轴方向为经度方向,指向东方,Z轴为垂直水平面方向,指向天空。第二个坐标系为飞机机身坐标系X'Y'Z',X'Y'平面为飞机机身平面,X'指向机头方向,Y'指向右侧机翼,Z'垂直机身平面指向天空。第三个坐标系统就是安装在机翼上的相控阵阵面自身定义坐标系X″Y″Z″,该坐标系的X″Y″平面为阵面平面,Z″垂直该平面指向天空。坐标系俯视图如图1所示。
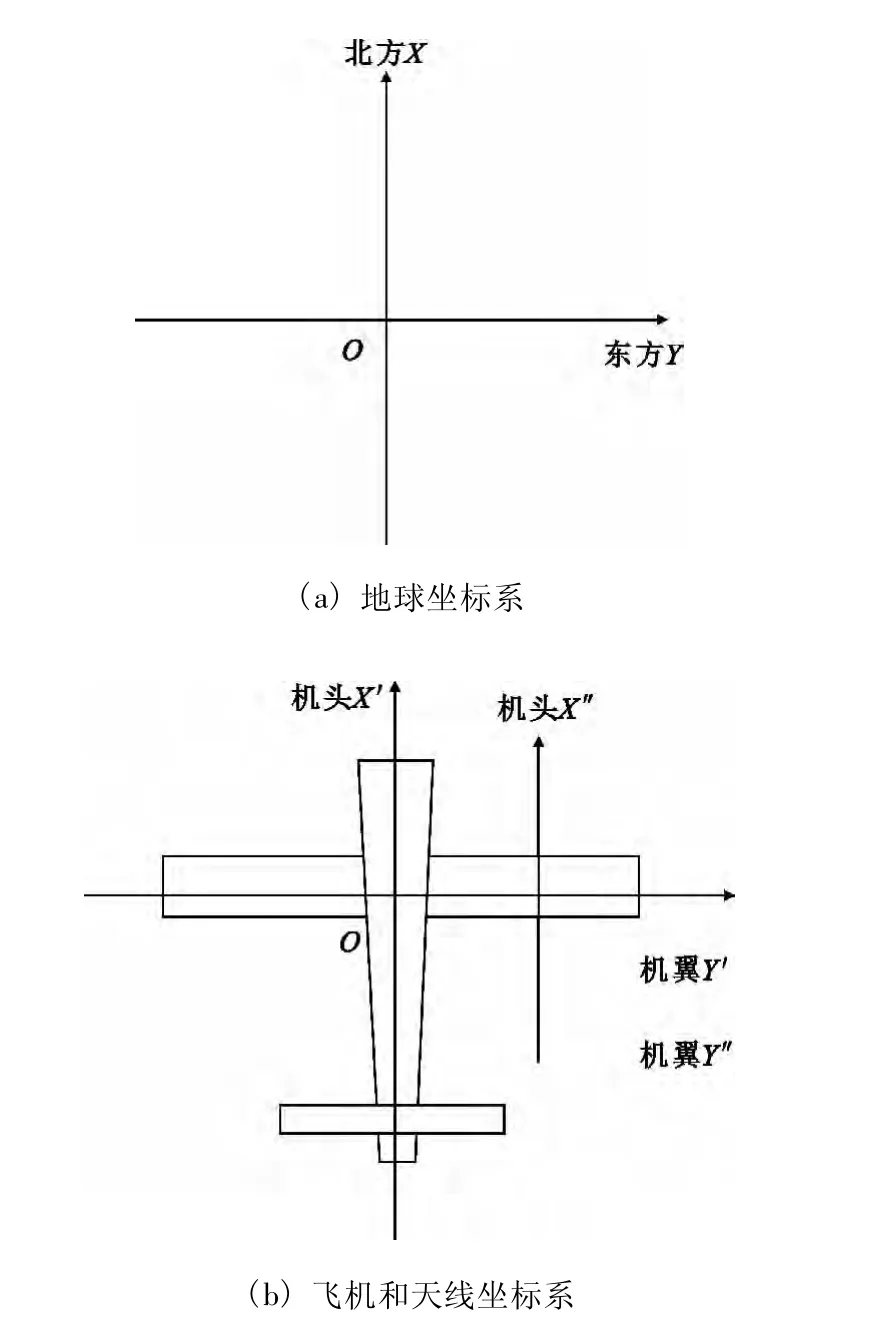
图1 三种坐标系Fig.1 Three types of coordinate system
安装在飞机上的航空电子系统,一个重要功能就是对飞机位置、姿态进行测量[6]。位置参数包括了飞机的经纬度、高度,姿态参数则包括了航向角α、俯仰角β和横滚角γ。通过位置参数和姿态参数,如果卫星位置是已知的,则可以计算出卫星信号相对于飞机的角度(θ,φ),即DOA。但是,由于姿态参数是相对于地球坐标系XYZ,而DOA又是相对于机身坐标系X'Y'Z',所以,这个DOA信息对于安装在机翼上的相控阵天线而言是不正确的。
由于相控阵只关心信号入射角度,而坐标原点移动并不会改变信号角度,所以可以假设上述三个坐标系的原点始终是重合的。飞机在飞行过程中,随着航向和姿态不同,上述两个坐标系的相对关系会发生变化。这些坐标变换关系,称为相控阵天线波束指向角度校正的理论依据。
2 指向角度校正方法
2.1 校正目的
由于机翼在飞行过程中的变形,安装在机翼上的相控阵天线阵面坐标与机身坐标是不重合的。航电系统能够提供卫星相对于机身坐标系的DOA参数(θ,φ),也能提供飞机机身相对于地球坐标系的姿态参数(α,β,γ)。角度校正的目的,就是利用航电系统提供的上述参数,计算卫星相对于阵列坐标系的DOA参数。
2.2 校正方法
校正方面的基本思想是通过航电系统提供的姿态参数和卫星DOA参数,计算卫星在地球坐标系下的坐标。然后利用相控阵自身安装的电子罗盘,测量相控阵天线阵面的姿态参数。结合上述两方面数据,计算卫星相对于阵面的DOA数据。
2.2.1 卫星位置计算
根据前文描述,假设三个坐标系的原点是重合的,而且,航电系统提供已知参数包括了(θ,φ)和(α,β,γ)。根据这些参数,我们首先计算卫星位于地球坐标系中的坐标。虽然卫星坐标数据在航电系统中是已知的,但考虑到相控阵波束指向校正模块与航电系统接口的兼容性,把姿态数据和DOA数据作为已知条件更具有可行性。
根据坐标定义,卫星在机身坐标系中坐标为
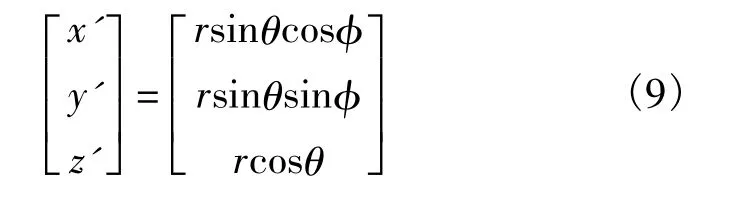
同时,根据坐标变换关系和姿态参数的定义,可以获得坐标变换矩阵 R[7]:

式中,
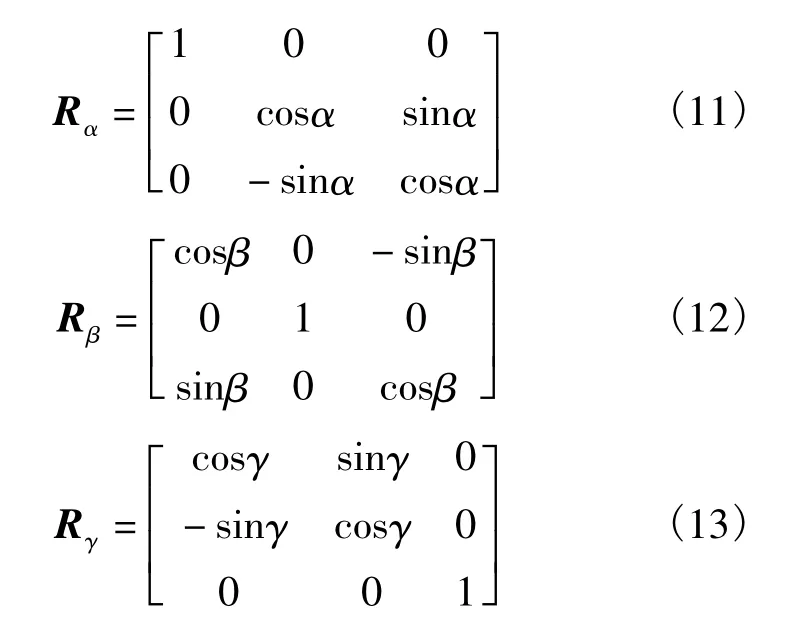
由坐标变换矩阵和机身坐标系下坐标,可以计算卫星在地球坐标系下坐标:

2.2.2 阵面姿态测量
相控阵天线安装在机翼上,机翼变形使得相控阵阵面姿态与航电系统飞机姿态不同。为了获得卫星相对于阵面的角度,必须获得相控阵阵面姿态信息,即阵面的航向角δ、俯仰角η和横滚角μ。有两种方面可以解决该问题,一是通过机翼的应力变形进行测量[8],二是通过安装在阵面上的电子罗盘进行测量。
如果采用应力测量的方法,需要安装光纤传感器,但该测量方法的精度难以保证。由于微机电系统(MEMS,Micro-electromechanical System)技术的发展,电子罗盘的体积和精度得到了很大提高,相对于光纤传感器具有更好的精度。
电子罗盘通常包括两个功能部分,一是航向角测量,二是姿态角测量[9]。磁阻传感器和陀螺仪是构成电子罗盘的主要部件。体积和测量精度是影响相控阵波束指向校正的主要因素。同时,相应速度、功耗、接口、安装、环境适应性也是设计中需要考虑的问题。
无论如何选择电子罗盘,其输出参数是以阵面为被测面,输出参数包括航向角δ、俯仰角η和横滚角μ。
2.2.3 校正角度计算
把卫星在地球坐标系下的坐标转换到阵面坐标系,需要利用电子罗盘的测量参数。定义坐标转换矩阵
式中,
同样根据坐标变换关系,并考虑式(14)~式(18),卫星在阵面坐标系下的坐标为
而阵面坐标系下的波束指向角度(θ″,φ″)同卫星坐标满足如下关系式
求解上述方程,即可得到(θ″,φ″)。
3 计算机仿真
3.1 校正方向图
仿真假设阵列为8×8均匀平面阵,阵元间距为半个波长。假设入射角对于阵面的俯仰角为30°,方位角为60°时,随机设置航电系统提供的卫星信号DOA参数,并仿真阵列方向图。根据相控阵天线原理,阵列方向图可以定义为

而权矢量按照式(8)计算。在不进行角度校正情况下,阵列方向图如图2所示,图2(a)和图2(b)分别为三维图和投影图。从图2看出,此时阵列不仅主瓣无法指向卫星,而且出现很大栅瓣。而图3为进行校正后的方向图,阵列主瓣指向了期望的角度,而且没有栅瓣出现,与相控阵天线的理论方向图一致。
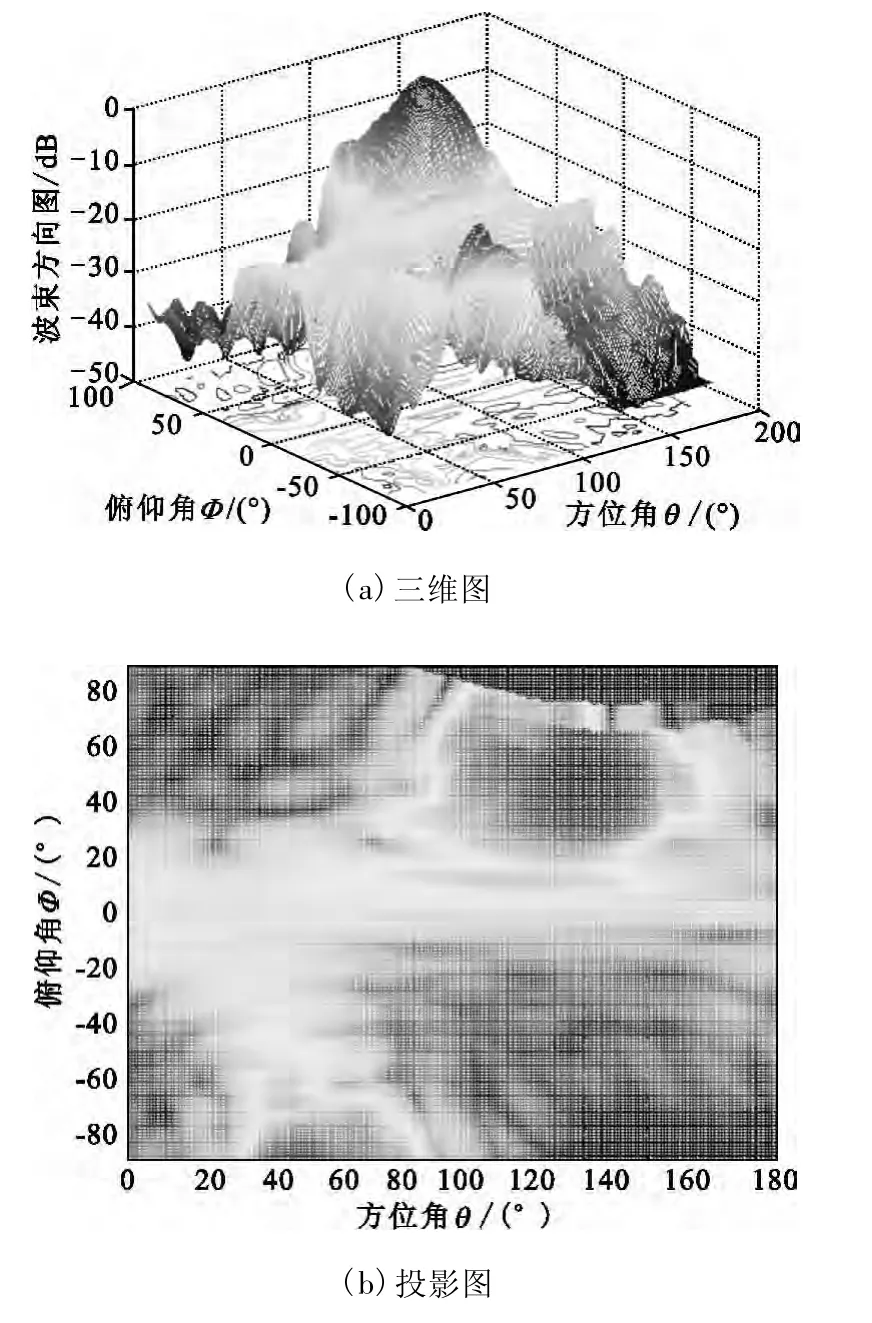
图2 无校正时的阵列方向Fig.2 Array pattern without calibration
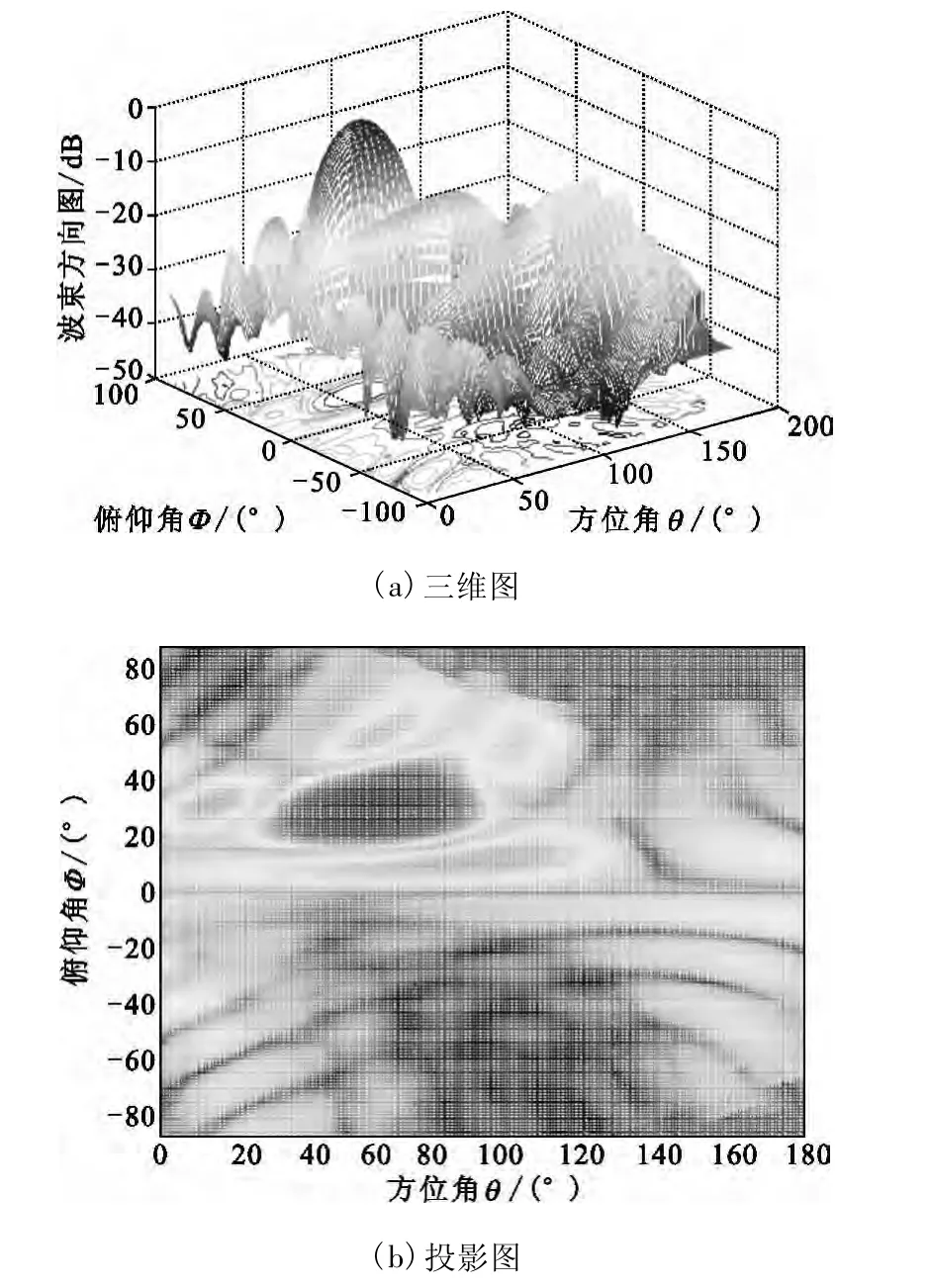
图3 有校正时的阵列方向Fig.3 Array pattern with calibration
3.2 测量误差影响
同样采用8×8均匀平面阵,若电子罗盘测量的航向角、俯仰角、方位角均存在误差,且均服从N(0,σ2)的高斯分布。若角度测量的误差方差σ2分别为0、4、8、16,对其进行仿真,观察相控阵输出信噪比SNRout,结果如图4所示。从图4中可见,当输入信噪比SNRin一定时,姿态参数测量误差导致了相控阵阵列增益下降,且随着误差σ2的增大,下降越严重。
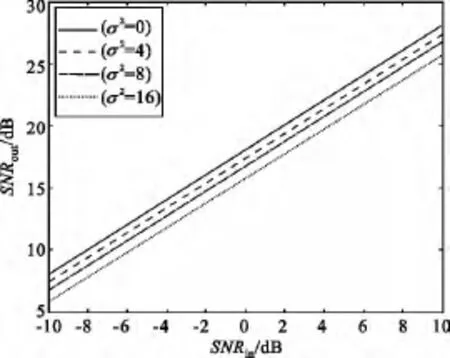
图4 姿态参数误差影响Fig.4 Error effect of attitude parameters
4 结语
国内外学者对相控阵天线的校准研究非常多,但主要集中在相控阵天线通道不一致上,而对于平台形变引起的波束指向偏差研究很少。通过电子罗盘和坐标变换,可以解决机翼变形对相控阵天线波束指向角度校正的问题。这种方法适用于任何可变形平台上的天线波束指向校正。由于校正的性能同测量因素相关,提高电子罗盘的测量精度是未来工作。
[1]WARNICK K F,IVASHINA M V,WIJNHOLDS S J,et al.Polarimetry with Phased Array Antennas:Theoretical Framework and Definitions[J].IEEE Transactions on Antennas and Propagation,2012,60(01):184 -196.
[2]VAN A A,BREGMAN J D,VAN CAPPELLEN W A,et al.Extending the Field of View with Phased Aray Techniques:Results of European SKA Research[J].Proceedings of the IEEE,2009,97(08):1531-1542.
[3]KANT G W,PATEL P D,WIJNHOLDS S J,et al.EMBRACE:a Multi-beam 20,000-element Radio Astronomical Phased Array Antenna Demonstrator[J].IEEE Transactions on Antennas and Propagation,2011,59(06):1990-2003.
[4]王志军,白旭平,刘琼俐,等.卫星通信系统中的抗干扰技术研究[J].通信技术,2012,07(45):10-13.WANG Zhi-jun etc.Study on Anti- interference Technology for Satellite Communication System[J].Communications Technology,2012,07(45):10 -13.
[5]MANTEGHI M,BLANCO R A.Novel Technique for a Low - cost Digital Phased Array Design[J].IEEE Transactions on Antennas and Propagation,2013,61(07):3495-3501.
[6]WU Z,YAO M,MA H,et al.Improving Accuracy of the Vehicle Attitude Estimation for Low-cost INS/GPS Integration Aided by the GPS - measured Course Angle[J].IEEE Transactions on Intelligent Transportation Systems,2013,14(02):553-564.
[7]张伟,张安堂,肖宇.基于坐标旋转数字计算方法的三维坐标变换[J].探测与控制学报,2011,33(02):73-80.ZHANG Wei,ZHANG An - tang,XIAO Yu.CORDIC Based Three - dimensional Coordinate Transform[J].Journal of Detection & Control,2011,33(2):73-80.
[8]李乃吉,王惠文,杨扬.连续分布式光纤传感器在测量大型构件形变中的应用[J].仪器仪表学报,1992,13(02):214-219.LI Nai-ji;WANG Hui-wen;YANG Yang.Application of Continuous Distributed Optical Fiber Sensor in the Measurement of Large Strain[J].Chinese Journal of Scientific Instrument,1992,13(2):214 -219
[9]张韦,刘诗斌,冯文光.基于磁通门的三轴电子罗盘自动误差补偿方法[J].传感技术学报,2012,25(12):1692-1695.ZHANG Wei;LIU Shi-bin;FENG Wen-guang.Automatic Error Compensation Method of Three-Axis Electronic Compass Based on the Fluxgate[J].Chinese Journal of Sensors and Actuators,2012,25(12):1692 -1695
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
电子机械工程(2022年2期)2022-04-25
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
舰船电子对抗(2021年1期)2021-04-15
舰船电子对抗(2019年5期)2019-12-04
电子制作(2019年24期)2019-02-23
传媒评论(2017年8期)2017-11-08
现代防御技术(2016年1期)2016-06-01