
SAVSTMV波束形成算法研究
2014-05-17 00:34:11卢中新周胜增
声学技术 2014年5期
卢中新,周胜增,高 源
(上海船舶电子设备研究所,上海 201108)
0 引 言
信号源方位(Direction of Arrival, DOA)估计方法主要包括常规算法和高分辨算法。常规波束形成的缺点是方位分辨力有限且抗干扰性能差;最小方差无畸变波束形成方法、多重信号分类(MUltiple SIgnal Classification, MUSIC)、导向最小方差(STeered Minimum Variance, STMV)波束形成等高分辨算法方位分辨力高,波束宽度不受瑞利限限制,但阵元域处理存在计算量大和稳健性差等缺点。文献[1]提出了基于子带子阵的自适应波束形成算法,该算法具有计算量小、稳健性好、分辨力高等特点。
矢量水听器可以同时测量声场中的声压信息和振速信息,因此,相比于常规声压阵,矢量阵可获得更多的信息,波束形成优于声压阵。文献[2]将 STMV算法应用到矢量阵中,提出了矢量阵导向最小方差(VSTMV)波束形成算法。为了改善VSTMV波束形成算法稳健性并减小其计算量,本文将子阵域STMV应用与矢量阵相结合,提出了子阵域 VSTMV波束形成算法(SAVSTMV),进行了理论和仿真研究,并与矢量阵常规波束形成进行了对比。
1 矢量水听器阵列信号模型[3,4]
假设M个二维矢量水听器(它们能同时测量声场中声压和质点振速的两个水平分量)组成均匀直线阵,间距为d,如图1所示。
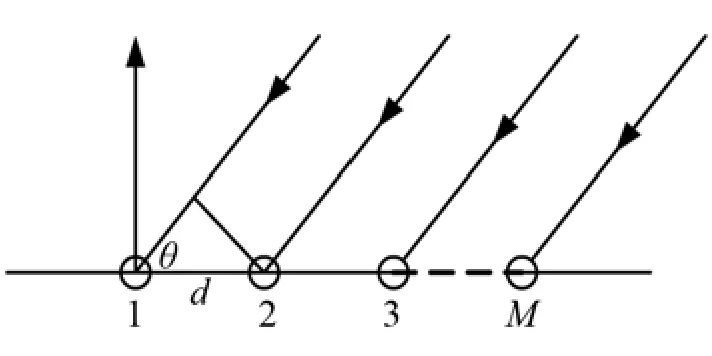
图1 等间距直线阵Fig.1 Uniform linear array
由图1可见,该阵型声压阵方向向量为:

二维矢量传感器的方向向量为

则该阵型矢量阵方向向量为

考虑J个信号源入射到矢量阵上,则第m个阵元接收的信号表示为

式中:θj表示第j个信号源的入射方向;sj(t)表示第j个信号源波形,是第m个阵元的声压和振速接收到的噪声矢量,
整个矢量阵接收信号可以表示为


分别表示S(t)、Nv(t)的傅里叶变换,fk∈ [fl,fh],[fl,fh] 为信号分析频带,k=l,l+1,··,h为相应的频率下标。
2 VSTMV算法[2]
导向最小方差(STeered Minimum Variance,STMV)波束形成算法应用到矢量阵上简称为VSTMV,文献[2]中对此有详细的介绍,现将主要推导公式列出。矢量阵列频域输出向量表示为

其中:

Tp(fk,θ) = diag(ap(θ)), I3为3阶单位阵。定义

为矢量阵对应方向θ的导向协方差矩阵(Vector STeered Covariance Matrix, VSTCM)。其中

为频域数据协方差矩阵,那么矢量阵权向量为

其中,1M表示为M×1维单位向量,则VSTMV波束形成的频域波束输出为

3 SAVSTMV波束形成算法
自适应波束形成算法中随着阵元数目的增加,阵列数据协方差矩阵的维数也随着增大,从而矩阵求逆计算量剧增,可以通过划分子阵来降低矩阵维数,减少矩阵求逆计算量。子阵处理基本原理是将整个接收阵划分成若干个子阵,对每个子阵进行常规波束形成,然后将预成在相同方向的不同子阵作为单个接收基元,最后对这些“子阵基元”进行自适应波束形成[1]。
对于M元二维矢量水听器阵列,假设将其划分成N个子阵,每个子阵含有Na个阵元,则每个子阵中含有 3Na路信号(一个声压和水平方向两个振速信号),对每个子阵进行矢量阵常规波束形成,同一预成方位下共形成N个子波束输出,最后将这N个子波束输出作为接收基元进行自适应波束形成。
定义矢量阵信号选择向量:

其中 INa为Na×1维单位向量。
重写式(7),为

ym(fk)表示第m个阵元信号经过相移后的值,m= 1 ,··,M。

式中,Pm(fk)、VXm(fk)和VYm(fk)分别为pm(t)、vxm(t) 和vym(t)的傅里叶变换。
第n个子矢量阵的常规波束形成为

其中,yni(fk)表示第n个子阵中的第i个阵元信号经过相移后的值,n= 1 ,2,··,N,i= 1 ,2,··,Na。
N个子矢量阵常规波束输出向量为

子矢量阵条件下的空间协方差矩阵为

其中Δf为处理的频带范围。
子阵域VSTMV波束形成的权向量为:

式中, 1N为N×1维单位向量。
子阵VSTMV频域输出为
由式(18)可以看出,通过子矢量阵VSTMV处理,空间协方差矩阵的维数由3M×3M维下降为N×N维,相对于VSTMV,大大降低了计算量,有利于工程上的实时实现。
4 仿真分析
仿真条件:二维矢量水听器个数为 16个,阵元间距为1.5 m,信号源为CW信号,中心频率为500Hz,加入高斯白噪声,分析带宽为 100~3000 Hz,采样率为16 kHz,将矢量阵分为4个子阵,每个子阵中有4个阵元,即子阵数N=4,每个子阵中的阵元数Na=4,所以每个子阵含有12路信号。
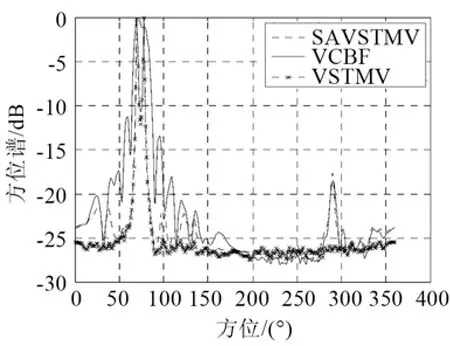
图2 SAVSTMV、VSTMV和VCBF波束输出(单目标, SNR: 10dB,方位 70°)Fig.2 Output patterns of SAVSTMV, VSTMV and VCBF(single target, SNR:10dB, azimuth: 70°)
图2为单目标仿真结果,其中SAVSTMV为子阵域VSTMV 的 波束形成算法,VCBF为矢量阵常规波束形成算法,VSTMV为阵元域矢量阵STMV波束形成算法。对比三种结果可以看出,SAVSTMV和VSTMV都比VCBF主瓣较窄,旁瓣也较低,提高了方位估计精度。SAVSTMV与VSTMV相比较,SAVSTMV的左右舷抑制比略低于 VSTMV,和VCBF的左右舷抑制比基本一样。
图3为双目标仿真结果,对比三种结果可以看出,对于两个方位较近的信号,VCBF算法不能够分辨出来,而SAVSTMV和VSTMV两种算法都能够分辨出来,但是SAVSTMV算法的左右舷抑制比低于 V STMV算法。

图3 SAVSTMV、VSTMV和VCBF波束输出(双目标, SNR: 10dB, 方位: [70, 78]°)Fig.3 Output patterns of SAVSTMV, VSTMV and VCBF (double target, SNR:10dB, azimuths: [70°,78°])
在实 际 试验和工作环境中,由于海流等其它因素可能会造成拖线阵的变形或者阵元损坏等情况,由此会影响波束形成的性能下降。通过对个别阵元信号置零来模拟阵元损坏情况,进行SAVSTMV和VSTMV的性能对比。将2号阵元、6号阵元信号置零,仿真结果如图4和图5所示。
图4和图5分别是单目标和双目标仿真结果。
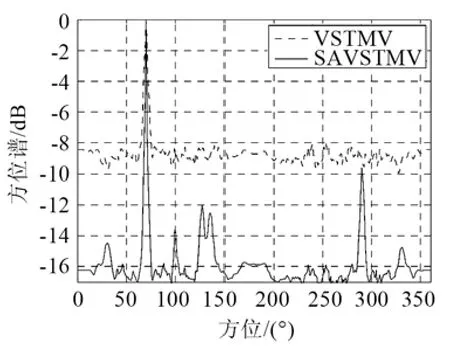
图4 稳健性比较(SNR: 10dB, 方位70°)Fig.4 Comparison of solidity robustness (single target, SNR: 10dB,azimuth: 70°)
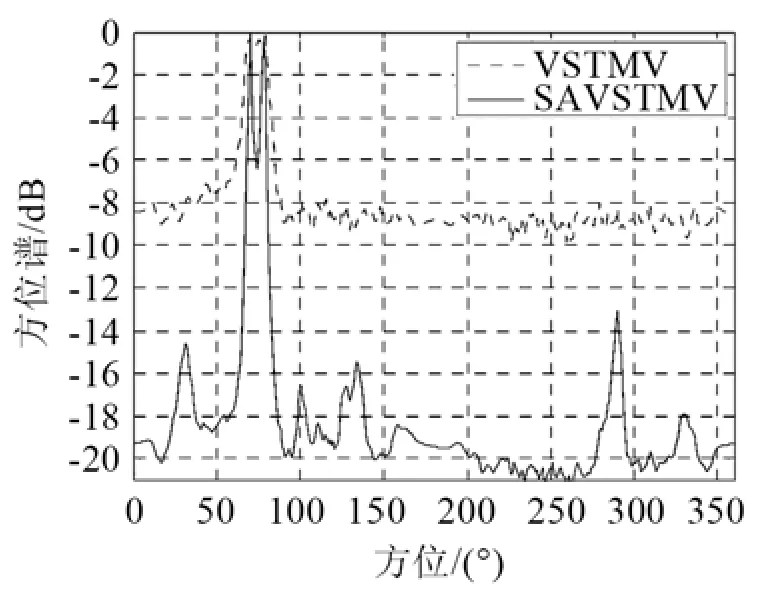
图5 稳健性比较(SNR: 10dB, 方位: [70, 78]°)Fig.5 Comparison of solidity robustness (double targets, SNR: 10dB,azimuths: [70°, 78°])
从图4和图5中可以看出,在矢量阵中阵元损坏的情况下,SAVSTMV算法要比VSTMV算法稳健性好,表现为主瓣窄,旁瓣级低,因此SAVSTMV比VSTMV具有较好的稳健性。
综上可以看出,SAVSTMV算法方位分辨率高,旁瓣级低,能够消除左右舷模糊现象,并且计算量低,稳健性好,有利于工程上的实时实现。
5 结 论
本文通过对矢量阵进行多子阵常规波束形成,然后再 进 行STMV自适应波束形成,从而降低了计算过程中数据协方差矩阵的计算量,并能有效提高算法稳健性。
仿真表明该算法能够分辨左右舷模糊现象,方位分辨力高,旁瓣级低,在部分阵元失效条件下仍具有较好性能,为工程上的应用具有一定的指导意义。
参考文献
[1] 周胜增, 杜选民. 快速收敛最小方差无畸变响应算法研究及应用[J]. 声学学报, 2009, 34(6): 515-520.ZHOU Shengzeng, DU Xuanmin. Research and application of fast-convergent minimum variance distortionless response algorithm [J]. Acta Acustica, 2009, 3 4(6): 515-520.
[2] 陈阳, 惠俊英. 声矢量阵导向最小方差波束形成算法研究[J]. 哈尔滨工程大学学报, 2008, 29(11): 1199-1204.CHEN Yang, HUI Junying. Acoustic vector-sensor array steered minimum variance beamforming[J]. Journal of Harbin Enginng University, 2008, 29(11): 1199-1204.
[3] 惠俊英, 惠娟. 矢量声信号处理基础[M].北京: 国防工业出版社,2009: 63-80.HUI Junying, HUI Juan. Elements of vector Acoustic singnal[M].Beijing: National Defense Industry Press, 2009: 63-80.
[4] 张揽月, 杨德森. 基于 MUSIC算法的矢量水听器阵源方位估计[J]. 哈尔滨工程大学学报, 2004, 25(1): 30-33.ZHANG Lanyue, YANG Desen. DOA estimstion based on MUSIC algorithm using an array of vector hydrophones[J]. Journal of Harbin Enginng University, 2004, 25(1): 30-33.
猜你喜欢
电子技术与软件工程(2022年8期)2022-07-08 03:31:12
电声技术(2022年3期)2022-04-28 00:22:50
应用科技(2020年1期)2020-06-18 02:02:36
舰船电子对抗(2019年4期)2019-09-10 02:00:16
商情(2019年3期)2019-03-29 12:04:52
财讯(2018年22期)2018-05-14 08:55:57
现代商贸工业(2016年35期)2016-04-09 06:59:32
中国炼油与石油化工(2015年4期)2015-06-22 14:19:10
声学技术(2014年1期)2014-06-21 06:56:34
机械与电子(2014年3期)2014-02-28 02:07:51
