磁悬浮风力发电机零偏置电流控制策略研究
2014-05-16 07:01:56谢振宇周红凯
振动与冲击 2014年23期
王 晓,谢振宇,周红凯
(1.南京航空航天大学机电学院,南京 2100162;2.江苏省精密与细微制造技术重点实验室,南京 210016)
磁悬浮风力发电机零偏置电流控制策略研究
王 晓1,2,谢振宇1,2,周红凯1,2
(1.南京航空航天大学机电学院,南京 2100162;2.江苏省精密与细微制造技术重点实验室,南京 210016)
建立了5自由度磁悬浮轴承支撑的垂直轴风力发电机转子试验系统,研制了零偏置电流模拟控制器,通过试验方法研究了该控制器对系统动态性能的影响。结果表明,零偏置电流控制方式在显著降低磁悬浮轴承电能损耗的同时仍然能够保证垂直轴风力发电机转子系统稳定运行。
风力发电机;电能损耗;零偏置电流;动态性能
面对世界性的能源匮乏和环境恶化等问题,风力发电机作为一种清洁能源产生装置,越来越受到人们的重视。与水平轴风力发电机相比,垂直轴风力发电机的主要优点是无需对风、结构简单、维修维护方便等;另外小型垂直轴风力发电机低噪声和美观等特点能够有助于实现城市中风电建筑一体化。
本文研制的垂直轴磁悬浮风力发电机转子试验系统包括:发电机定子、发电机转子、磁悬浮轴承以及刹车部件。磁悬浮轴承具有无接触、无磨损、无需密封和润滑等优点,将其作为支承部件,可以降低风力发电机的启动风速[1]。但磁悬浮轴承本身也需要消耗电能,当风速较低时,风力发电机产生的电能尚不能满足磁悬浮轴承自身的消耗,因此减少磁悬浮轴承的电能损耗可进一步降低启动风速,提高系统效率。
已有研究表明,采用零偏置电流控制方式能够有效降低磁悬浮轴承自身的功耗。Kenzo[2]最早提出零偏置电流控制策略,并将其应用到储能飞轮系统中。Tsiotras等[3-4]采用Lyapunov方程分析了零偏置电流控制系统的稳定性。应用于垂直轴磁悬浮风力发电机转子试验系统中,Toshiyuki等[5]研究了H∞零偏置电流控制策略对储能飞轮动态性能的影响。本文将零偏置电流控制方式研制了5自由度零偏置电流模拟控制器,通过试验方法研究了该控制器对系统动态性能的影响。
1 试验系统
图1为垂直轴磁悬浮风力发电机转子试验系统的机械结构图,发电机转子由两个径向磁悬浮轴承和一个轴向磁悬浮轴承支承,图1中标号名称:1为发电机转子,上端可通过联轴器和风轮联接,2为下径向磁轴承,3为永磁电动/发电机,4为轴向磁悬浮轴承,5为上径向磁悬浮轴承,6为复合材料刹车片。
根据总体设计,风轮和发电机转子的总重量G为4 100 N,极转动惯量Jp为520 kgm2,最高转速n为120 r/min,由风力载荷和离心力所引起的最大径向载荷F 为4 000 N,径向载荷F作用点与发电机转子上端间距离l1为320 mm,发电机转子上端与上径向磁悬轴承间距离l2为233 mm,两个径向磁悬浮轴承间距离l3为428 mm,要求刹车时间t约为30 s[6]。

图1 系统机械结构图Fig.1 Mechanical structure of the system
2 零偏置电流模拟控制器
一般主动磁悬浮轴承为差动结构,即两边电磁铁产生的磁场为偏置磁场和控制磁场的叠加,分别由偏置电流与控制电流产生。零偏置和有偏置电流控制时电磁铁中的电流分别如图2和图3所示[7]。

图2 零偏置电流控制示意图Fig.2 Schematic illustration of zero-bias current control

图3 有偏置电流控制示意图Fig.3 Schematic illustration of bias current control
由图2可以看出,在零偏置电流控制方式下,当转子悬浮至指定位置时,两个差动电磁铁均无电流;当转子位置偏离指定位置时,在某一时刻两个差动电磁铁中只有一个有电流,另一个没有电流,通过差动电磁铁中电流差值产生合适的磁场力将转子拉回指定位置。
由图3可知,在有偏置电流控制方式下,无论转子处于何位置,偏置电流始终存在,两个电磁铁中在每一时刻均有电流。所以与有偏置电流控制方式相比,采用零偏置电流控制方式可以大大降低电磁铁自身的功耗。
本文中,零偏置和有偏置电流控制器采用PID控制策略,其传递函数可表示为

式中kp为比例系数,ki为积分系数,kd为微分系数,Td为微分时间常数。
零偏置电流控制器的原理图如图4所示,其基本思想是将系统的位移控制信号同时送入过零电压比较电路和开关门电路中,由过零电压比较电路生成开关门的控制信号Uh或Ul来控制开关的开断;由此将系统的位移控制信号分为正值部分与负值部分,并将这两部分分别送入两路功率放大器中,实现在某一瞬时两个差动电磁铁中只有一个电磁铁有电流。
过零电压比较电路如图5所示,该电路采用LM311芯片作为主芯片。将峰值VPP为10 V,频率f 为5 kHz的正弦波信号输入该电路,输入和输出信号如图6所示,其中示波器通道1采样信号为输出信号,通道2采样信号为输入信号。由图6可见,输出信号为高低逻辑电平,可用来作为开关门电路的控制信号,高电压为+2.5 V,低电压为-1 V。

图4 零偏置电流控制原理图Fig.4 Principle diagram of zero-bias current control
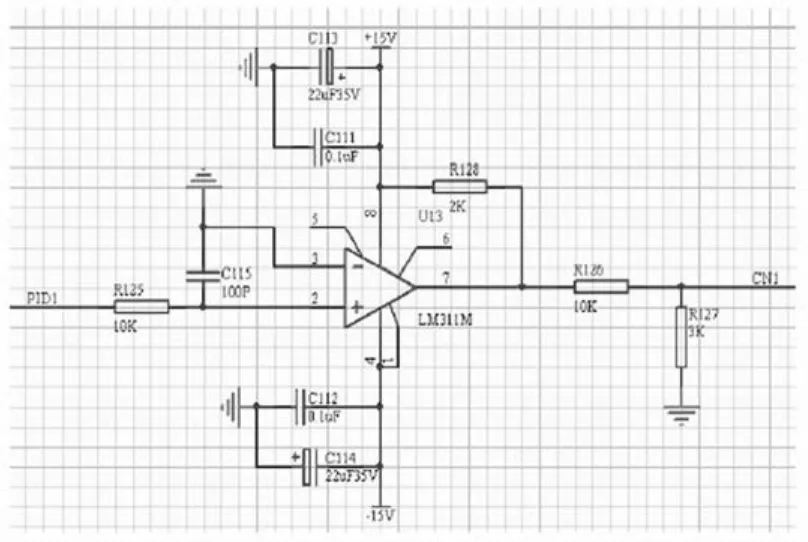
图5 过零电压比较电路Fig.5 Zero voltage comprison circuit
开关门电路采用模拟开关芯片作为主芯片,其中四个径向自由度采用一块ADG511芯片和一块ADG512芯片,轴向自由度采用一块ADG513芯片。这三块芯片内各自有四个单掷开关,其中ADG511芯片的逻辑控制端为低电平,ADG512芯片的逻辑控制端为高电平,ADG513芯片中两个开关的逻辑控制端为高电平,另外两个为低电平,逻辑控制端输入均为VINH=2.4 V,VINL=0.8 V。因此过零电压比较器产生的逻辑电平能够满足开关门电路的输入需求。
图7所示为由模拟开关ADG511芯片构成的开关门电路。系统的位移控制信号通过开关门电路后将信号分为了正值部分和负值部分,如图8所示,其中示波器通道1采样信号为系统位移控制信号的正值部分,通道2采样信号为位移控制信号的负值部分。由图8可以看出,开关门电路的输出满足设计要求。

图6 开关门控制端逻辑信号Fig.6 Logic signal of chip switch control end

图7 ADG511芯片开关门电路Fig.7 ADG451 chip switch gat ecircuit
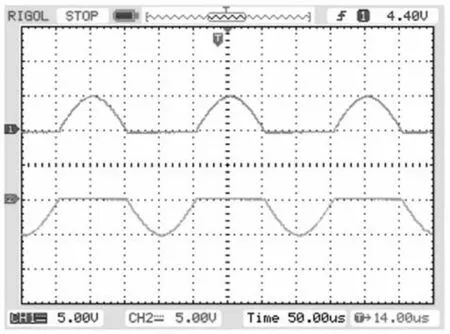
图8 经过开关门后控制信号示意图Fig.8 Schematic diagram of chip swit chcontrol signal
3 零偏置电流控制系统功率放大器
在本文中的零偏置电流控制系统中采用电压—电流型开关功率放大器,两个半桥功率电路中母线电压为DC110V。
零偏置电流控制系统中的功率放大器在各个自由度上均需要分A、B两路独立的功率电路,并且与相应的差动电磁铁对应。在此本文以A路功率电路对零偏置电流控制系统中的功率放大器进行说明。有偏置电流方式与零偏置电流方式下A路功率电路的工作原理框图分别如图9与图10所示。

图9 有偏置电流功放原理框图Fig.9 Schematic diagram of the bias current amplifier

图10 零偏置电流功放原理框图Fig.10 Schematic diagram of zero bias current amplifier
当只有偏置电压时,能够产生占空比为50%的PWM波,此时功放输出所设计的偏置电流。当没有偏置电压时,控制信号与电流反馈信号(模拟电压量)能够产生占空比为0%~50%的PWM波。偏置电压、控制信号以及电流反馈信号三者相互叠加可以产生占空比为0%~100%的占空比的PWM波,即输出电流值为0 A~2 I0(I0为偏置电流,本文中为2.5 A)。在零偏置电流控制系统中,功率放大器的PI控制器输入电压信号中,去除了偏置电压,只有模拟零偏置电流控制器输出的控制电压与对应的线圈电流反馈信号。为了满足原来的控制逻辑,当去除偏置电压,即功率放大器为零偏置电流方式时,必须将功放输出增益变为原来的两倍。零偏置电流功放实物图如图11所示。

图11 零偏置电流功放实物图Fig.11 Photo of zero bias current amplifier
4 试验研究
由于垂直轴风力发电机转子在垂直方向所受到的总载荷(重力与风力载荷之和)始终朝下,因此在本文中轴向磁悬浮轴承采用单边电磁铁结构,轴向自由度采用有偏置电流控制方式,偏置电流为2.5 A。为了进行对比研究,在径向四个自由度分别采用零偏置和有偏置电流控制方式,偏置电流分别为0 A和2.5 A。垂直轴磁悬浮风力发电机转子试验系统的实物照片如图12所示。

图12 试验系统实物照片Fig.12 Photo of the experimental setup
4.1 径向控制参数稳定区域
根据稳定区域,选定轴向自由度的控制参数分别为:比例系数kzp为2.72,积分系数kzi为16.8,微分系数为kzd为0.037,微分时间系数Tzd为1.12×10-5s。
径向四个自由度分别采用零偏置电流与有偏置电流控制方式,当积分系数kri为18.6和微分时间系数Trd为1.12×10-5s时,测得径向自由度控制参数的稳定区域如图13所示。由图13可知,采用零偏置电流控制方式时,比例系数krp取值范围为1.4~3.05,微分系数krd取值范围为0.008 1~0.042;采用有偏置电流控制方式时,比例系数krp取值范围为1.14~3.35,微分系数krd取值范围为0.006~0.051。与有偏置电流方式相比,零偏置电流方式将导致稳定区域减小。

图13 径向控制参数稳定区域Fig.13 Stability range of the radial control parameters
4.2 静态悬浮
轴向自由度的控制参数仍如前所述。当径向四个自由度分别采用零偏置和有偏置电流控制方式时,根据图13,选定径向四个自由度的控制参数如表1所示。在上述控制参数作用下,转子在五个自由度方向上均能稳定悬浮至指定平衡位置。

表1 控制器参数Tab.1 Control parameters of the system
当径向四个自由度采用零偏置电流控制方式且转子稳定悬浮时,径向第一自由度差动电磁铁中的电流如图14所示。由图14可知,电磁铁中一边有电流,另一边电流为零,其余三个径向自由度与此类似。
图14 零偏置电流控制差动电磁铁中电流Fig.14 Current of differential magnet under zero-bias current control
当径向四个自由度采用有偏置电流控制方式且转子稳定悬浮时,径向第一自由度差动电磁铁中的电流如图15所示。由图15可知,差动电磁铁两边均有电流,并且电流值均比采用零偏置电流控制时大。

图15 有偏置电流控制差动电磁铁中电流Fig.15 Current of differential magnet under bias current control
4.3 系统运行试验
径向四个自由度分别采用零偏置与有偏置电流控制方式,控制参数仍如前所述。采用变频电源驱动试验装置中的内置永磁电动/发电机,带动转子由静止旋转至120 r/min。
在系统运行过程中,将径向第一自由度的位移传感器输出信号和电流传感器输出信号分别接入HP35670A动态信号分析仪进行数据采集。利用HP35670A采集转子振动幅值以及在振动信号中所包含的频率信号,用同样的方法采集电流变化幅值以及电流信号中所包含的频率信号,然后利用origin软件绘制出所测位置的转子同频振动幅值曲线,如图16所示,以及对应的同频电流变化幅值曲线,如图17所示。由图16可以看出,当采用零偏置电流控制方式时,转子的同频振幅较大,但系统仍然能够稳定运行,转子振动保持在合适的范围内。由图17可以看出,当采用有偏置电流控制方式时,电磁铁中平均电流为3 A;而当采用零偏置电流控制方式时,电磁铁中平均电流为1.75 A。与有偏置电流方式相比,零偏置电流控制方式所需平均电流减少41.6%。其他三个径向自由度有相似的结果。
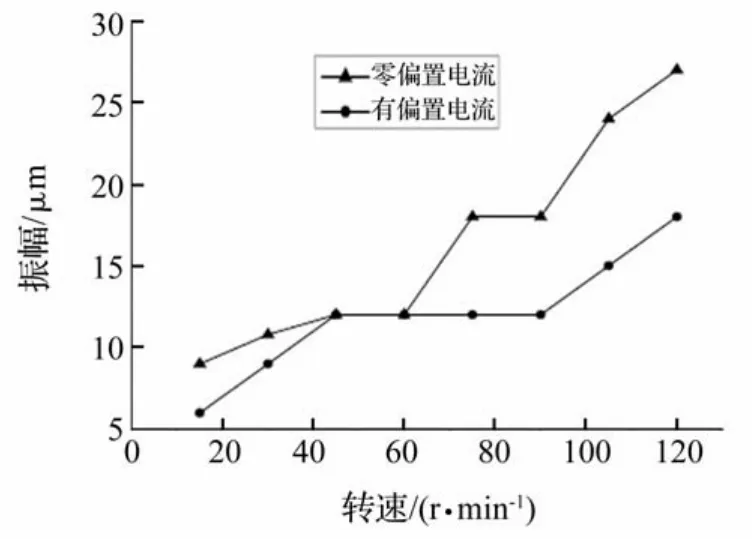
图16 同频振幅变化曲线Fig.16 Curves of same frequency amplitude

图17 同频电流变化曲线Fig.17 Curves of same frequency current
5 结 论
(1)与有偏置电流方式相比,零偏置电流控制方式将导致控制参数稳定区域减小和发电机转子振幅增大。
(2)对于本试验系统而言,当采用零偏置电流控制方式时,发电机转子的振幅仍然保持在合理的范围内,系统能够安全稳定运行。
(3)零偏置电流控制方式能够明显减少磁悬浮轴承所需电流,有利于进一步降低磁悬浮风力发电机的启动风速,提高系统效率,保证系统具有较好的综合性能。
[1]李惠光,张广路,周巧玲.垂直轴磁悬浮风电悬浮系统的模糊滑膜控制[J].武汉理工大学学报,2010,32(10):136 -140.
LI Hui-guang,ZHANG Guang-lu,ZHOU Qiao-ling.Fuzzy sliding mode control of vertical axis magnetic suspension wind power suspension system[J].Journal of Wuhan University of Technology,2010,32(10):136-140.
[2]Kenzo N,Zihe L.Zero power nonlinear control of magnetic bearing system[C]//Proc.of the 8th Int.Symp.on Magnetic bearings.Mito.,Japan:Ibaraki University,2002:83-89.
[3]Tsiotras P,Wilson B C,Zero-and low-bias control designs for active magnetic bearings[J].IEEE Transactions on control systems Technology,2003,11(6):889-904.
[4]Tsiotras P,Wilson B C,Control of Zero-bias magnetic bearing using control lyapunov functions[C]//Proceedings of the 39th IEEE,Conferenceoncontrol,Sydney,Australia,December,2000.
[5]Nakamura T,Hirata M,Nonami K,Zero bias H∞control of active magnetic bearings for energy storage flywheel systems [C].Ninth International Symposium on Magnetic Bearings,August 3-6,2004,Lexington,Kentucky,USA,2004,3-6.
[6]谢振宇,王晓,周红凯.风力发电机用同极型磁悬浮轴承的支撑性能[J].振动工程学报,2013,26(1):112-117.
XIE Zhen-yu,WANG Xiao,ZHOU Hong-kai.Supporting performance homopolar magnetic bearing for wind turbine generator[J].Journal of Vibration Engineering,2013,26(1):112-117.
[7]谢振宇,吴凯锋,石庆才,等.同极型结构和零偏置电流控制对磁悬浮轴承损耗影响的实验分析[J].航空动力学报,2011,26(2):404-408.
XIE Zhen-yu,WU Kai-feng,SHI Qing-cai,et al.Analysis of homopolar type structure and zero bias current control effect on the magneticbearinglossexperiments[J].Journalof Aerospace Power,2011,26(2):404-408.
Control strategy with zero-bias current for magnetic levitation wind power generator
WANG Xiao1,2,XIE Zhen-yu1,2,ZHOU Hong-kai1,2
(1.College of Mechanical and Elec trical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Jiangsu Key Laboratory of Precision and Micro-Manufacturing Technology,Nanjing 210016,China)
The setup of a vertical axis wind power generator rotor system with 5-DOF supported with active magnetic bearings was built.A zero-bias current analog controller was also developed.The influence of the controller on the dynamic performance of the system was investigated with the test method.The results showed that the zero-bias current analog controller can be used to reduce power loss of active magnetic bearings obviously,and also to guarantee safe and stable operation of the system at the same time.
wind power generator;power loss;zero-bias current;dynamic performance
TH212
A
10.13465/j.cnki.jvs.2014.23.012
国家自然科学基金(51275238);江苏省高校优势学科建设工程资助
2013-10-09 修改稿收到日期:2013-11-28
王晓男,硕士生,1988年4月生
谢振宇男,副教授,1968年生
邮箱:xiezy@nuaa.edu.cn
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02 06:33:56
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
机械工业标准化与质量(2021年8期)2021-10-13 06:44:24
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
防爆电机(2021年2期)2021-06-09 08:14:38
减速顶与调速技术(2021年3期)2021-03-09 03:15:00
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:46:03