
基于灰色理论的自主式水下航行器舵机控制系统设计
2014-05-15 11:30:20吴正平陈永亮
三峡大学学报(自然科学版) 2014年2期
吴正平 陈永亮 唐 念 俞 辉
(1.三峡大学 电气与新能源学院,湖北 宜昌 443002;2.三峡大学 理学院,湖北 宜昌 443002)
近年来,随着水下资源的开发以及军事上的需求,AUV的发展越来越受到关注.舵机作为AUV控制方向的执行机构,直接影响到AUV的总体控制性能.而电动舵机相对于气动、液动舵机控制简单、性能可靠,故在水下航行器中得到了广泛应用[1].因舵机控制要求超调量很小(以一次性旋转到位为佳)、调节时间短,传统PID很难达到控制要求.文献[2]提出了分段式PID控制,即根据舵角偏差的大小选择不同的KP、KD系数,但是这种方法需要大量实验后的经验才能得到较好的分段系数,实现起来有一定的难度.文献[3]提出了改进的模糊PID控制算法,虽然可以改善模糊PID的控制性能,但是其隶属度函数的建立需要专家经验,较难根据实际环境得到合适的参数.文献[4]提出了一种基于DSP的模糊神经网络控制器,从仿真实验可以看出其控制效果较好,但是神经网络运算量大,计算复杂,并且稳定性还有待验证.文献[5]提出了一种灰色预测PID控制,其控制效果较好,易于实现,本文在其基础上加以改进,用于AUV舵机控制,仿真和实验均证明控制效果较好.
1 舵机控制系统总体方案
本课题设计的舵机控制器是用一个控制板来控制两路舵机:水平舵机和垂直舵机,其中水平舵机用来控制AUV的高度,垂直舵机用来控制AUV航行角度.舵机选用直流无刷电机,采用经典的三环控制[6],即电流环、速度环和位置环,整体控制框图如图1所示.其中电流环作为内环,速度环作为中间环,位置环作为外环.STM32RCT6单片机自带18路12位AD采集通道和直接内存存取(DMA)模块,可用于快速AD采集和数字滤波;256KFlash存储器,可用来存储PID参数,1路CAN控制器,外接CAN接收器(MCP2551)即可实现CAN通信;2路12位DAC,可用于电机模拟量速度控制;多路I/O口,用于数字信号输入输出控制.
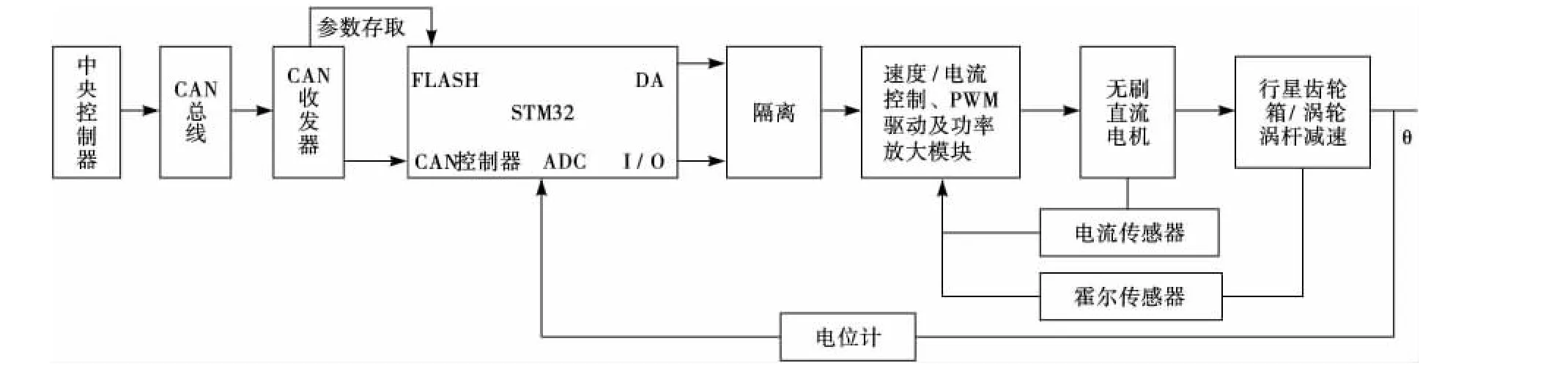
图1 直流电机三环控制框图
2 控制算法设计
2.1 PID算法
PID控制算法如下:

式中,u(t)为控制器输出,e(t)为控制器输入,KP为比例放大系数,TI为积分常数,TD为微分常数.
增量式数字控制器的输出只是控制量的增量ΔU,离散化后的PID算法如下:
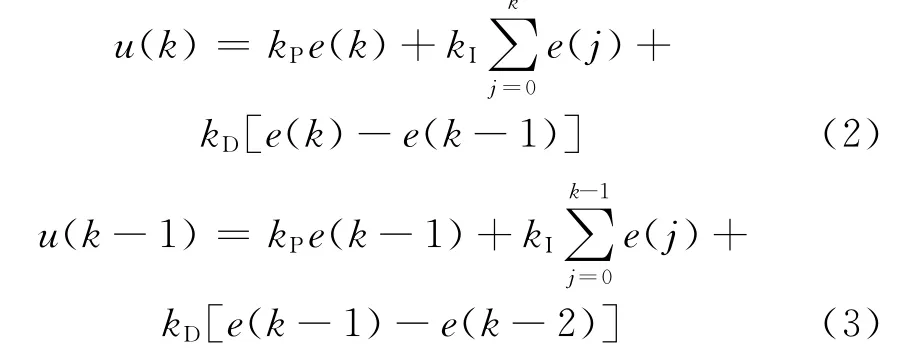
式(2)-式(3)可得

式(4)即为增量式PID的数学模型.增量式PID算法相对于位置式PID算法的优点是算式中不需要累加,控制增量u(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果.
2.2 灰色模型
部分信息已知,部分信息未知的系统称为灰色系统[7].灰色理论是对原始数据进行变换生成规则序列后再建模,从而预测事物未来的发展趋势.对于AUV舵机的控制,影响其控制性能的因素很多,而且干扰也随环境而变化,难以建立精确的控制模型.因此适合考虑以时间序列来构造灰色预测模型,根据系统未来的行为趋势进行相应的控制决策和预测控制.在灰色系统理论中,灰色模型是由一组灰色微分方程组成的动态模型,记为GM(n,h).其中:n为微分方程的阶数,h为变量个数.灰色模型中应用较为广泛是的GM(1,1)模型,该模型由一个单变量一阶微分方程构成.下面用GM(1,1)来描述灰色系统建模过程.假设原 始 数 据 为 X(0)= (X(0)(1),X(0)(2),…,X(0)(n)),一阶累加后生成新的序列X(1)=(X(1)(1),X(1)(2),…,X(1)(n)),其中:X(1)(i)=2,…,n,则X(1)序列具有指数增长的规律,即满足一阶线性微分方程

Z(1)(k)为 X(1)的紧邻生成序列,Z(1)(k)=0.5 X(1)(k)+0.5 X(1)(k+1),k=1,2,3,…n.
得累加生成序列的灰色方程:

再对此式做累减还原,可得X(0)的灰色方程:

当k=n-1时,式(6)为灰色滤波方程,当k>n-1时,式(6)为灰色预测方程.
2.3 灰色PID
文献[5]提出使用灰色预测对PID反馈量进行处理,用预测采样值代替真实采样值,控制框图如图2所示.
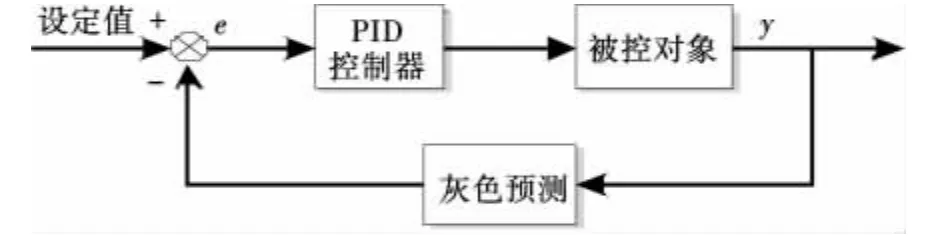
图2 灰色预测控制框图
舵机控制系统的广义动态特性的数学模型可以通过实验的方法得到,即用舵机转速阶跃扰动实验,获取电机转速变化曲线,然后用工程法拟合舵机广义数学模型.通过实验,使用舵机二阶简化模型:G(s)=进行仿真,经过测试,选择灰色预测建模维数m=4,使用上述控制方式进行Matlab仿真,用s函数编写灰色预测环节用于Simulink中,系统阶跃响应曲线和误差曲线如图3和图4所示.

图3 灰色预测控制系统阶跃响应曲线

图4 灰色预测控制系统 误差曲线
从曲线可以看出,灰色预测PID相比于常规PID超调量稍有减小,系统调节时间与常规PID相近,上升时间增加,控制效果基本没有得到改善.考虑到其误差曲线在拐弯处存在滞后性,在误差变化趋势发生改变时,其预测值与实际值偏差较大,曲线不平滑,选择在灰色预测之后加入灰色滤波器,控制框图如图5所示.
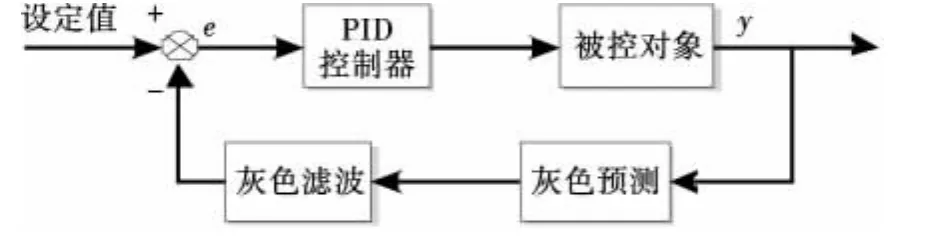
图5 改进灰色预测控制框图
灰色预测和灰色滤波均选用4阶模型,系统阶跃响应曲线和误差曲线如图6和图7所示.

图6 改进灰色预测控制阶跃响应曲线
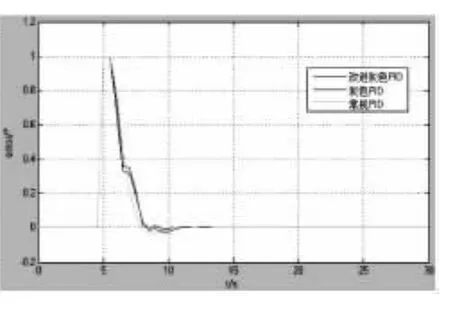
图7 改进灰色预测控制 系统误差曲线
由仿真曲线可以看出,加了灰色滤波器之后,误差跟踪性能得到提升,PID调节性能也随之改善.
3 实验及结论
将上述控制方法用于自主研发AUV的舵机控制系统中,用STM32单片机编程实现,实际控制效果如图8中“性能分析”部分所示.

图8 测试主控界面
图8为系统调试上位机界面.右边“性能分析”部分为使舵机输出角度为1°时舵机实时采样位置曲线,其中横坐标为时间,纵坐标为实际角度.实际要求舵机控制精度为±0.2°,从图中曲线可以看出,采用灰色预测与灰色滤波控制方式控制的超调量小,可将舵机位置精度控制在0.1°,响应速度较快,曲线较为平稳,能够满足实际控制要求.
[1]徐德民.鱼雷自动控制系统[M].2版.西安:西北工业大学出版社,2001.
[2]李 霞,苏渊博.基于AVR单片机的电动舵机控制器设计[J].单片机与嵌入式系统应用,2013,13(5):67-69.
[3]王 迪,严卫生,付江峰.模糊控制在AUV舵机控制系统中的应用[J].2009,34(12):163-165.
[4]刘海涛,许 晖,流诗林.基于DSP的无刷舵用电机智能控制系统设计[J].国外电子测量技术,2011,30(2):67-69.
[5]黄春岑,与向军,吕震中.基于灰色预测PID球磨机负荷控制[J].自动化仪表,2007(3):62-64.
[6]张爱军.基于DSP+CPLD的无刷直流电机三环控制设计[J].电力电子技术,2012,46(11):106-108.
[7]邓聚龙.灰色预测与决策[M].武汉:华中工学院出版社,1986.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
汽车维修技师(2019年7期)2020-01-16 04:33:04
自动化学报(2019年6期)2019-07-23 01:18:36
天津教育·下(2018年9期)2018-07-13 08:25:47
汽车维修技师(2018年11期)2018-05-11 02:38:32
电子制作(2018年1期)2018-04-04 01:48:14
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
制造业自动化(2017年2期)2017-03-20 14:26:08
舰船科学技术(2015年8期)2015-02-27 15:38:46
新高考·高一物理(2014年4期)2014-09-17 06:52:02
