
基于自适应PSO粒子滤波的智能跟踪系统
2014-05-11 03:10杨文龙贾敏智
制造业自动化 2014年11期
杨文龙,贾敏智
(太原理工大学 信息工程学院,太原 030024)
基于自适应PSO粒子滤波的智能跟踪系统
杨文龙,贾敏智
(太原理工大学 信息工程学院,太原 030024)
0 引言
目前,通过视频跟踪目标的跟踪系统大多是在PC机上实现的,应用C/C++、VC++等高级程序设计语言,采用软件方式实现视频跟踪算法,由于算法的复杂性和不实用性,跟踪算法只能仿真实现而不能应用到实际,而PC机体积大、功耗高等特点限制了它在视频跟踪中的应用[1]。现有的粒子滤波算法是一种新提出的用于视频跟踪的算法,该算法在处理非线性非高斯方面具有优越性,采用带权重的粒子集来估计后验分布,一般的粒子滤波算法在目标跟踪时的持续性有效性存在不足,把粒子群优化算法融入粒子滤波的算法在动态求取最优解时往往使最优解陷入局部最优[2]。针对现有算法的不足,对现有PSO粒子滤波算法进行了改进,提出了一种新的PSO粒子滤波算法,该算法能够在线调整粒子数,动态寻优,减少运算量,并能准确估计目标的位置状态。基于此算法设计了智能跟踪系统,该系统以TMS320F28335(DSP)和FPGA为主要硬件处理视频图像数据。TMS320F28335的串行通信对数据处理有一定影响,但FPGA具有可修改性高、功耗低、并行执行等特点,使其能弥补DSP的不足。基于FPGA实现的目标跟踪器在硬件设计上采用并行和流水线技术,能达到图像数据处理的速度要求,有效的实现目标跟踪。
1 系统整体方案
本系统是基于自适应PSO粒子滤波算法的智能跟踪系统,具有能自动识别目标并对目标进行有效跟踪的功能。摄像头模块采集的图像数据由FPGA先进行预处理,然后发送到DSP。
TMS320F28335微处理器主要负责视频图像数据的分析与处理,根据视频跟踪算法识别目标,确定目标位置然后根据目标的位置信息来控制小车移动,跟踪目标。
1.1 系统硬件设计
系统硬件由DSP数据分析处理模块,视频图像处理转换模块,图像存储单元,FPGA数字处理模块,电机驱动部分,触摸屏显示模块,OV7670摄像头模块等组成。
系统硬件框图如图1所示。

图1 系统硬件框图
摄像头模块能自动将视频信号经过模数转换为8位数字信号输出,并对视频信号进行行、场同步分离,驱动地址分离器为采集的图像分配存储地址并按顺序存入图像采集存储器。在扩充外部RAM时选用IS61LV25616AL型号RAM,外部FLASH选用SST39VF800a。LCD显示屏用来观察跟踪目标的状态。TMS320F28335执行相应的自适应PSO粒子滤波的算法程序进行图像数据的分析与处理,确定出目标的位置,微处理器再根据目标状态信息E( xt)来控制电机驱动模块使小车调整车速和方向实现目标跟踪。
1.2 视频信号预处理单元
该部分主要由FPGA来完成。采用在线可编程大容量的FPGA(EP1K100)。FPGA为系统的数字处理单元,具有数字滤波功能,能抑制信号中的干扰,使目标检测能力提高[3]。FPGA在接收到摄像头模块输出的视频信号后对其进行预处理,再将处理后的数字图像信息存放在图像存储器中。
1.3 图像数据处理单元
本单元主要由TMS320F28335、图像存储器组成。对目标的图像信息进行处理,分析控制中心的命令并实时进行去噪处理、背景分离、目标提取、粒子滤波获取每帧的图像信息 ( x0,y0,r0),输出目标在视频图像中的大小和位置数据[4]。每帧图片为320×240大小。 DSP通过FPGA配置OV7670模块,使其直接输出8位数据,以此来减轻DSP处理图像信息的负荷。
1.4 主控制程序
系统的主控制程序控制着系统的有序运行。系统在上电或者复位后,进行初始化,初始化后进入自动跟踪程序,主程序首先调用图像接收程序,再调用自适应PSO粒子滤波目标跟踪算法程序,然后调用图像分析和处理程序来确定目标,进而获得目标位置信息 ( x0,y0,r0),利用PWM调速模块驱动电机控制小车移动并追踪目标。系统的主控制流程图如图2所示。
1.5 图像采集
摄像头模块OV7670的VSYNC、HREF、PCLK各引脚信号由FPGA读取,并将其状态存储在一个8bit数据变量SIGA中供DSP读取,DSP根据读取的SIGA状态和摄像头模块输出的图像信息时序图来采集图像数据,根据PSO自适应粒子滤波算法来处理图像信息,进而确定出目标现在状态E( xt)。图像获取流程图如图3所示。
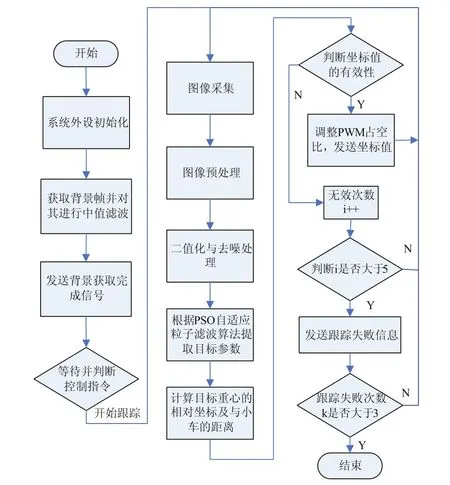
图2 系统主控制流程图

图3 图像获取流程图
2 改进的自适应PSO粒子滤波算法
自适应PSO粒子滤波算法相对于传统的卡尔曼滤波、Mean—Shift算法等有很高的精度,能够有效解决遮挡、光照和背景变化等目标跟踪时出现的问题。传统的粒子滤波算法因为粒子数目多,所以运算复杂,滤波时间长,使得系统的实时跟踪性差。改进的自适应PSO粒子滤波算法是一种可以动态改变粒子数的算法,能根据各个时刻实际跟踪情况 ,在保证一定性能的前提下,自动择优改变粒子数目,可以有效的降低参与运算的粒子数目,从而使滤波时间性能和实时性提高。本算法对行人进行人体骨架模型简化,用三角特征来描述目标,再通过粒子滤波估计目标位置。
2.1 人体骨架模型
在检测识别人体时选择了人体骨架模型作为目标检测的特征值,以简单的人体模型的肢体作为局部坐标,各个主要肢节为关节点,用一组线段来连接各个关节点。图4所示为人体骨架模型[5]。

图4 人体骨架模型图

图5 人体抽象模型
人体用三元组X=(x,y,r)来表示,x,y,r分别表示人的图像在帧中的坐标位置和大小,跟踪就是在视频帧中确定出目标的X=(x,y,r)。
2.2 行人检测
常见的行人行走姿势如图5所示,传统的行人检测是采用矩形特征来描述,这种方法效率低,检测范围具有局限性。由人的行走姿势图可知人的各个部位都广泛的存在着倾斜,这种不同程度的倾斜从各个角度都能观测到。为此,采用三角特征来代替矩形特征更符合人的行走姿态,三角特征能改善矩形特征的局限性,可以从各个部位来检测行人,也更符合行人特征,减少了所需的特征数目,降低了误差率,提高了目标检测准确率[6]。
本文在Rainer Lienhart矩形特征值计算方法基础上,采用一种极限思想,逐级逼近计算三角特征特征值[6],如图6所示。
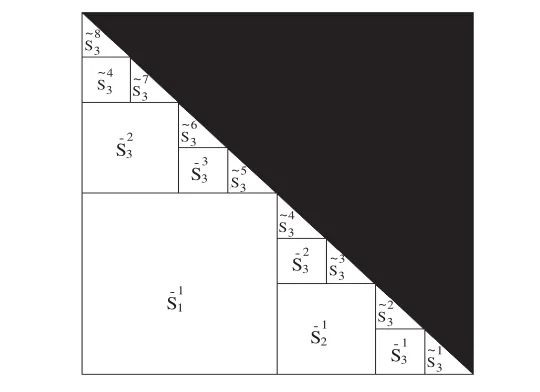
图6 三角特征计算示意图
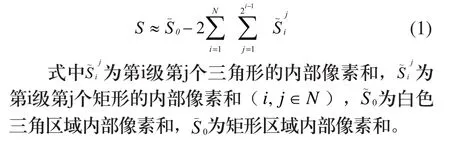
计算三角特征的特征值S为:
2.3 跟踪算法描述
本文采用的PSO粒子滤波算法是一种自适应的算法,该跟踪算法描述如下[2,5]。


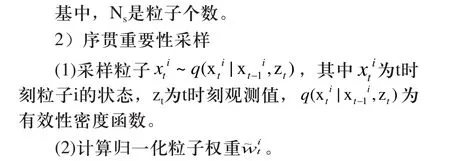
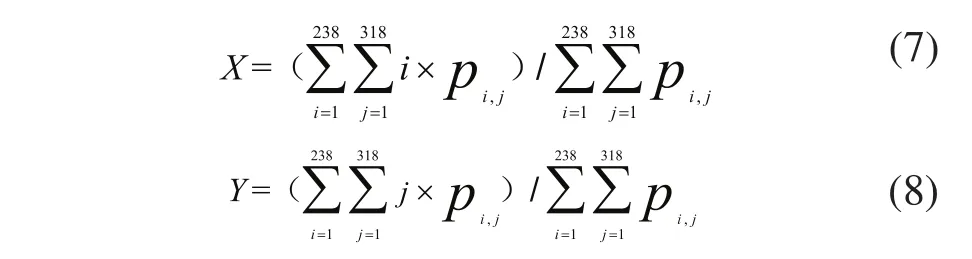
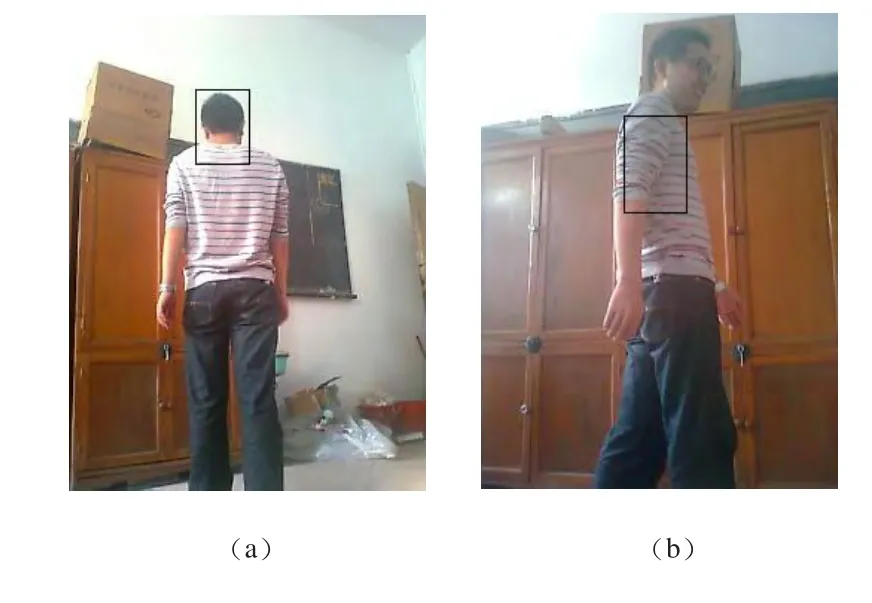
3)计算有效性样本容量Neff。如果Neff 5)重采样。 继续跟踪则转入2)。 采用中值滤波法来消除原始图像噪声,将所求点(i,j)像素周围的9个像素值进行排列并求取中值,该中值既为所求点(i,j)像素值。在去噪处理过程中该方法可使目标边缘信息很好的保留[7]。 为降低环境对目标提取过程中的干扰,分离目标图像和其当前背景,并二值化处理目标图像。 在此基础上通过腐蚀处理目标图像来进一步减小环境噪声干扰。用5×5的结构元素对获得的当前目标图像的每个像素点进行扫描,用该结构元素和其覆盖下的二值化的目标图像进行逻辑“与”运算,结果为1,则图像像素值为1,否则为0[8]。经过以上处理能进一步优化消噪效果,准确标记目标。 图像在经过上述预处理后标记出目标所在的位置,再通过加权平均法获得目标在当前图像中的位置坐标信息,算法如下: 其中(X,Y)为目标所在图像中的位置坐标。 D为当前图像进行二值化后最终的所有像素值之和,即D为跟踪目标占当前图像面积的大小,由透视原理可知远近不同物体大小也不同,所以可根据D值来通过相应算法计算出目标和小车之间的距离,进而决定小车是否前进和前进的距离。 在实验室环境下,取视频帧中的两帧为例进行说明。如图7所示,图7(a)为从目标背后采集的图像,图7(b)为从目标侧面采集的图像。不论是从后面还是侧面,采集的是人体的哪个部位,该跟踪系统都能准确识别目标,并进行跟踪。经试验测试,小车能识别跟踪人的最远距离为3m,小车的最快速度为2m/s,在此基础上小车能很好的跟踪行人。 图7 目标跟踪测试结果 在算法上采用改进的自适应PSO粒子滤波算法,减小了运算量,结合中值滤波,背景差分,腐蚀处理等数字图像处理技术,成功的提取了目标位置。硬件上通过FPGA处理摄像头输出的图像信息,这样不仅实现了电平转化,还减轻了DSP获取图像的负担。该跟踪系统完成了算法与硬件的结合,实现了智能跟踪功能,稳定性良好。由于现有条件有限,该跟踪系统的目标识别距离有限,复杂环境下的跟踪情况还有待改进。 [1]王爱侠,李晶皎,陆振林,等.基于FPGA的粒子滤波跟踪系统的设计与实现[J].小型微型计算机系统,2013,34(3):580-584. [2]姚海涛,朱福喜,陈海强.一种自适应的PSO粒子滤波人脸视频跟踪方法[J].武汉大学学报(自然科学版),2012,37(4):492-495. [3]干戈.基于DSP+FPGA的双通道实时图像处理系统设计[J].舰船电子工程,2008,28(7):75-78. [4]刘陵顺.TMS320F28335 DSP原理及开发编程[M].北京:北京航空航天大学出版社,2011. [5]丁婕,汪亚明,郑俊褒.自适应粒子滤波在人体跟踪过程中的应用[J].工业控制计算机,2010,23(11):59-60,63. [6]赵春晖,潘泉,梁彦等.视频图像运动目标分析[M].北京:国防工业出版社,2011. [7]孙兴华,郭丽.数字图像处理[M].北京:机械工业出版社,2012. [8]许甲海,王立东,卢晓文.基于TMS320F2812的图像识别智能跟踪小车[DB/OL].(2012-8-4)[2013-10-21]http://wenku.baidu.com/view/b68a5736b90d6c85ec3ac6a7.html. Intelligent tracking system based on adaptive PSO particle filter YANG Wen-long,JIA Min-zhi 为解决现有跟踪算法的复杂性和不实用性等问题,提出了一种新的自适应PSO粒子滤波算法。该算法能动态调整粒子数,根据三角特征提取目标信息,准确估计目标状态位置。在此算法基础上设计了智能跟踪系统,该系统以DSP为视频图像处理的核心,由FPGA预处理视频图像数据,实现了对目标的识别与跟踪。 自适应PSO粒子滤波;图像处理;DSP;实时跟踪 杨文龙(1988 -),男,河北石家庄人,硕士研究生,研究方向为智能控制理论与应用。 TP391.4 A 1009-0134(2014)06(上)-0011-04 10.3969/j.issn.1009-0134.2014.06(上).03 2014-01-09
3 图像预处理原理



4 测试结果
5 结束语
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
昆明医科大学学报(2022年1期)2022-02-28
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2018年16期)2018-09-26
浙江工业大学学报(2017年5期)2018-01-22
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
