基于Trio控制器的吸收式造波机运动控制系统设计
2014-05-08 11:51:58张小乐呼英俊
天津科技大学学报 2014年2期
张小乐,呼英俊
(天津科技大学机械工程学院,天津 300222)
造波机是在实验水池中模拟波浪的设备,可人工控制产生不同类型的波浪,模拟实际海浪对船舶或各种建筑物的作用.但因为实验水池的长度有限,造波机对模型或池壁的反射波会再一次反射,即波浪的二次反射,它会严重影响实验结果.而吸收式造波机在产生拟需波浪的同时,能吸收实验区域内的二次反射波,其原理是在推波板式造波的基础上,通过采集、计算波浪数据,给推波板一个附加的二次位移,以消除反射波浪撞击推波板形成的二次反射波,从而更真实地模拟海浪的运动[1].
现有吸收式造波机多采用工控机与控制卡的方式进行运动控制[2].这种方式提前设定工控机和控制卡的相关程序,硬件组成、连接及操作都比较简单.其缺点在于集成化过高,扩展性、互换性不好,在不同造波环境、不同造波条件下难以通用;各种处理运动控制和参数采集的板卡全由工控机控制,还需进行模数转换,延缓了控制命令传输和采集信号处理的时间,控制时效和精度不够理想.
随着计算机控制技术的发展,运动控制也逐渐网络化、数字化.网络化使控制更灵活、开放,数字化使控制更简单、精确.采用PC和运动控制器相结合的控制方式,用PC作为信息处理平台,可发挥PC的信息处理快、开放的程序语言及可在线网络检测和修复等优点;用控制器实现期望造波运动,可充分利用运动控制器中的运动算法和进行精确的轨迹控制.这种方式的信息处理速度快、运动控制精度高、开放扩展程度好、系统可靠性高,更适合吸收式造波[3–4].
本文针对吸收式造波,选择支持网络化、数字化的运动控制器,在程序设计中利用C语言应用广泛、人机交互方便和 Fortran语言在数据处理上的优势,并调用运动控制器的运动算法,使得造波运动程序设计、参数设置和数据分析都更简单,较好地实现了吸收式造波.
1 运动控制系统的基本工作原理
吸收式造波机运动控制系统的工作原理见图 1.
根据期望的波高周期数据,由上位机程序计算推波板的位移和时间控制信号,运动控制器接收后将其转换为运动方向和速度的控制信号,伺服驱动器再将其转换为脉冲信号驱动伺服电机运动,经执行装置带动推波板作相应的往复运动,推动水面产生波浪.在推波板前固定距离处设置 2个波高传感器采集推波板前的波高信号.运动控制器根据反馈信号计算设定值与实测值之间的差值,并以此调整下一时刻控制推波板的位移,使之生成与反射波反相位的波,以消除二次反射波,实现吸收式造波;另一方面,波高信号反馈回PC,与期望波谱的数据对比,完成统计分析.
在吸收式造波机工作过程中,最重要的是要实时采集推波板前波高数据,迅速计算得出下一位移量并确保执行装置及时响应,这就对运动控制器的性能及信号传输速度提出了较高的要求.

图1 运动控制系统的工作原理Fig.1 Block diagram of the motion control system
2 运动控制器及其通信
2.1 Trio控制器
运动控制器选用 Trio Motion公司的 Trio MC224型数字独立运动控制器,其融合了最新的控制理论和技术,具有多种控制和通信方式、多任务编程、可扩展性丰富等优点.它采用 32位 120~150,MHz的 DSP微处理器,计算速度快,控制精度高,满足吸收式造波对控制器运算速度的要求;包含直线运动、梯形运动、曲线运动等多种轴运动轨迹控制模式,可完全脱离 PC独立进行控制,在 PC出现通信故障等问题时,依然可以进行吸收式造波的控制.控制器采用模块化设计,可连接扩展多种具有轴控制功能的子板,实现对多个伺服单元的控制,在大港池、多方向条件下造波也完全适用.控制器与 PC间通信可采用总线或网络方式,如 PROFIBUS、DeviceNet、EtherNet/IP、CANopen 等方式;控制器与伺服驱动器通信可采用总线或数字式,如CANopen、EtherNet/IP、SERCOS等方式,多种通信接口使其应用扩展更广泛.
2.2 EtherNet/IP通信
Trio控制器与PC之间选用EtherNet/IP通信协议,它是一种工业以太网的应用协议.相比于其他控制系统中常见的总线结构,工业以太网的标准更规范、更通用,在远距离传输、组件成本、软硬件资源等方面也更有优势;而且可与普通网络通连,利用网络的在线监测,远程控制也很方便,已成为现场设备控制网络的发展趋势.
EtherNet/IP协议采用Producer/Consumer通信模式,它不同于其他协议从源到点的指定模式,而是规定所有节点都可在同一时间读取来自同一个源的数据[5].这种模式的效率更高,实时性更好,适用于在造波现场由PC向控制器发送信号指令.
Trio控制器面板配置有相关接口,通过网线即可实现连接;PC中基于Windows平台建立EtherNet/IP网络也较简单,为组网和数据交换提供了很大便利.
2.3 SERCOS接口
在吸收式造波中,Trio控制器与伺服驱动器之间的通信最重要,要求快速、稳定、误差最小地传输调整信号.而现有系统中多常用模拟接口,受噪声影响较大、传输速度缓慢、精度不高、线路连接复杂,不能满足吸收式造波高速、稳定的要求.基于数字化控制的设想,选用SERCOS数字接口.SERCOS接口是数字控制接口的唯一国际标准,具有较高精度的实时性和开放性,可保证快速建立数字连接、传送参数、精确控制和智能诊断的实现.
SERCOS光纤网络结构如图2所示,其最主要的特点就是用光纤取代传统多轴控制系统中的普通电缆,是全数字式的网络通信方式,不会受到其他电气系统的干扰,对噪声的免疫能力很强,无信号漂移,传输精度高.其协议也规定了数据传输格式,对网络通信带宽的需求相对较低,通信速率大于 4,MB/s,通信周期小于 1,ms[6].相比传统的模拟技术,SERCOS有效提高了工程速度,减少工程调试及维护时间,运行速度更快,精确度更高.

图2 SERCOS光纤网络结构Fig.2 SERCOS fiber-optic network structure
Trio控制器自带 SERCOS通信子板模块,选用的驱动器配置有 SERCOS接口,可以方便地用提供的线缆进行连接,实现SERCOS数字通信.
3 程序设计
在程序设计上采用混合编程调用的方法,采用C语言和 Fortran语言进行上位机程序设计,实现包括基本造波及吸收式造波的控制功能、系统的初始化设定、推波板的回零定位、目标波谱及造波参数的设定、数据统计分析及报警保护功能[7].
控制执行机构由Trio控制器自带Trio Basic语言编写运动控制程序程实现.编程通过 Motion Perfect平台进行,然后下载到控制器中存储和运行.Trio控制器提供ActiveX功能,可以根据设备的需要在计算机中用高级程序语言进行二次开发;提供 OCX Component功能,可以自动检测控制器内的程序并与计算机中程序比较;计算机中有 VB、VC、C++等语言编写的程序时,可直接调用其运动函数,复制到Trio处理器中进行运算处理和控制,方便进行操作.
4 实 验
利用本文设计的控制系统,在天津水运工程科学研究所的实验水槽中进行测试.水槽长 35,m,宽1,m,高 1.2,m,最大水深为 0.8,m.实验时,将模拟的波谱或波高数据由主程序输入,计算获得控制推波板运动所需的数字控制信号,经由运动控制程序,驱动机械装置带动推波板运动.推波板往复运动的位移决定波高,往复运动的频率决定波浪周期.板前设置2个波高传感器,运用两点法进行入反射分离,分别求得入、反射波高与周期[8].部分实验数据见表1.对实验数据的评价参考 JTJ/T234—2001《波浪模型试验规程》,模拟规则波的平均波高和周期的允许偏差为±5%.结合表 1数据可以看出:非吸收式造波的波高数据受反射波的影响,误差很大;而吸收式造波的实验结果误差小,满足要求;本文设计的吸收式造波机的实验误差最小,精度最高.
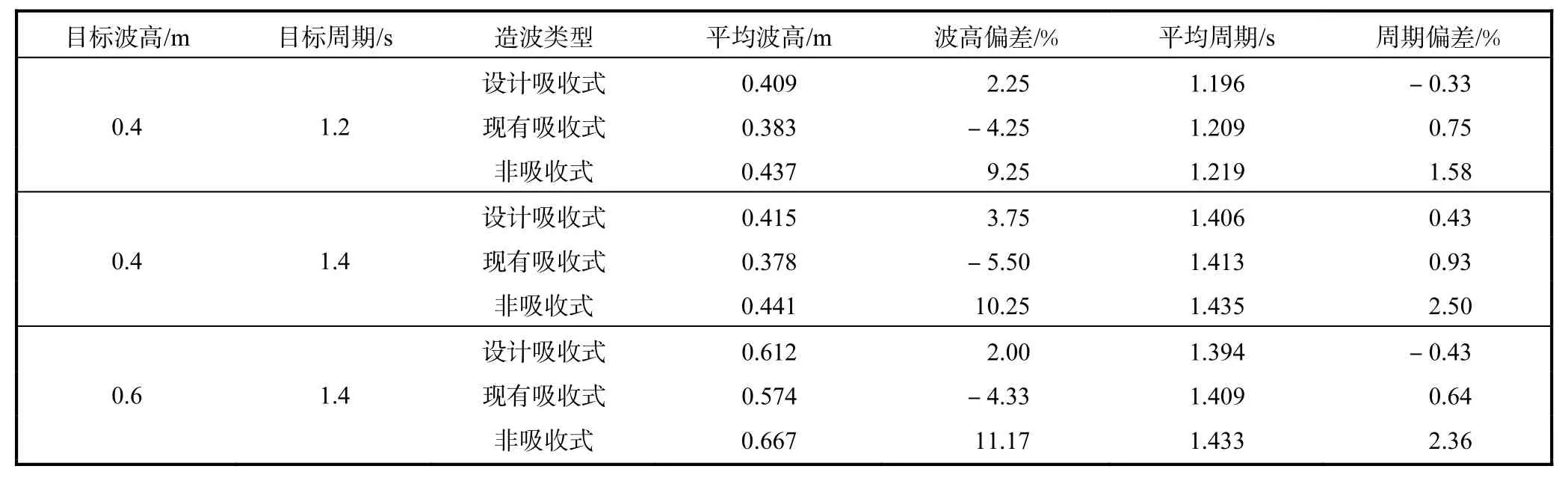
表1 各类型造波机造波实验数据Tab.1 Experimental wave data of various types of wave maker
另外,程序可统计画出实验的波面过程图.其目标波高 0.4,m、周期 1.4,s的实验波面过程如图 3所示.由图 3可以看出:实验过程中,非吸收式造波的波面波动较大,在很长的实验时间范围内都难获得稳定的波高;现有吸收式造波机相比非吸收式造波,在波高稳定度上有明显的进步,进行吸收造波之后的波高变得比较稳定,但由于控制系统不够精确,与期望的波高还是有一定差距;而本文设计的吸收式造波机的波面最稳定,波高偏差最小.
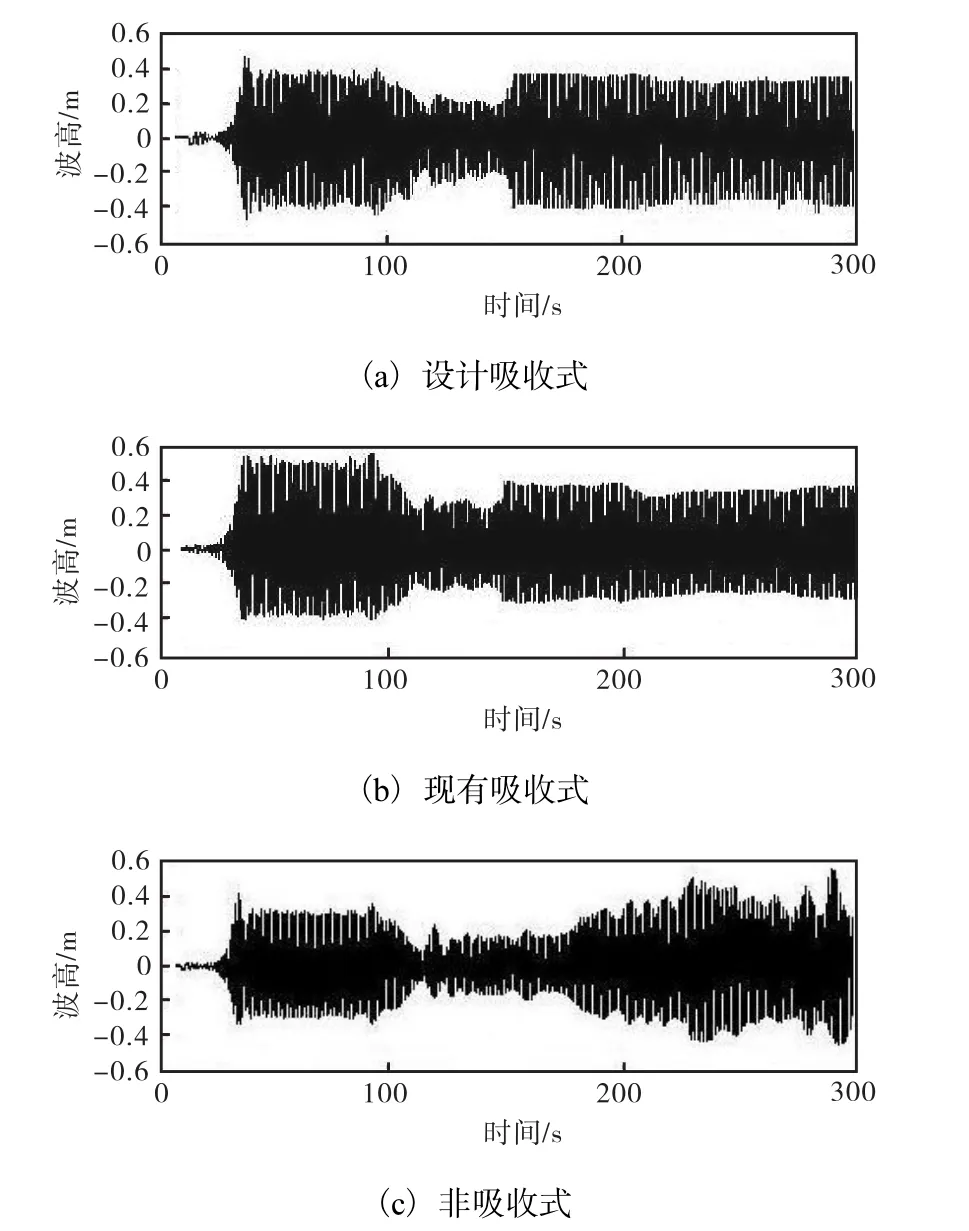
图3 各类型造波机造波实验波面过程图Fig.3 Experimental wavefront process map of various types of wave maker
5 结 语
本文设计了吸收式造波机的运动控制系统,针对现有造波机的信号传输处理不及时、控制精度不理想问题进行改进.上位机程序设计采用混合编程的方式,对执行机构控制调用 Trio Basic语言,更好地实现了对推波板的运动控制.相比现有装置,信号传输与处理完全采用数字信号,使控制系统响应更快,运行更稳定.实验证明设计达到了预期效果.
[1] 王先涛. 吸收式造波机理论[D]. 大连:大连理工大学,2002.
[2] 张亚群. 造波机的控制及其实现[D]. 武汉:武汉理工大学,2007.
[3] 班华,李长友. 运动控制系统[M],北京:电子工业出版社,2012.
[4] 郗志刚,周宏甫. 运动控制器的发展与现状[J]. 电气传动自动化,2005(3):12–16.
[5] 邓昌建. 工业以太网通讯协议和接口技术研究[D]. 成都:电子科技大学,2005.
[6] 李琰,徐殿国,戚佳金,等. SERCOS接口应用技术研究[J]. 伺服控制,2006(5):26-28.
[7] 张瑞波,王收军,朱国良. 基于VC6.0和FORTRAN语言的造波机控制软件的研究与开发[J]. 制造业自动化,2008(8):49-52.
[8] 张瑞波. 港工波浪模拟设备的研究[D]. 天津:天津理工大学,2008.
猜你喜欢
中国港湾建设(2024年1期)2024-01-30 09:45:06
海洋通报(2021年3期)2021-08-14 02:20:46
煤气与热力(2021年5期)2021-07-22 09:01:58
齐鲁工业大学学报(2021年3期)2021-06-23 00:45:06
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:42
中国特种设备安全(2021年12期)2021-04-26 14:36:56
中国港湾建设(2021年2期)2021-02-27 05:43:40
科技资讯(2017年19期)2017-08-08 08:39:37
舰船科学技术(2016年1期)2016-02-27 15:39:16
女报seaside(2014年10期)2014-04-29 21:02:51