小方坯端面标识设备写字机构的动态特性分析
2014-05-08 11:51:52宗庆勋
天津科技大学学报 2014年2期
傅 旻,宗庆勋
(天津科技大学机械工程学院,天津 300222)
钢坯标识设备是钢铁企业生产时的重要设备之一,为了便于对钢铁产品进行生产和质量方面的管理,往往需要对钢坯产品进行编号,把由相关信息组成的唯一编号标识在钢坯表面.如果发现质量问题,就可以根据编号来追踪到生产此坯的连铸机号、炉座、炉号、流序号以及时间等重要信息,便于及早发现并解决设备的问题[1].目前对钢坯标识的方法主要有等离子式、喷涂式、电蚀式、雕刻式、压印式、激光式等,其中喷涂式的应用较为广泛.国外对标识系统的研究起步较早,以奥地利的 NUMTEC公司为代表,其在2004年就推出了E7000电弧喷涂系统[2].我国近年才有少数科研机构进行标识系统的研究,仍存在着标识效果差,字迹不够清晰等问题[3–4].
小方坯端面标识设备是喷涂式的钢坯标识设备,写字机构是小方坯端面标识设备的最重要的核心部件,其动态特性决定了钢坯标识的效果,因此有必要对小方坯端面标识设备的动态特性进行分析.本文对自主研制的小方坯端面标识设备的写字机构进行动态特性分析,以保证所设计的写字机构符合使用和安全要求.
1 模态分析
ANSYS模态分析的主要目的是计算结构的固有频率及其相应的振型.对于广义特征值问题,ANSYS软件提供了多种模态提取方法:Subspace Method(子空间迭代法)使用子空间迭代技术,精度较高,适用于大型对称问题的求解,可以控制子空间迭代过程;Power Dynamics Method(动态提取法)适用于解决特大规模问题,自由度 1,000,000以上,特别适合于只求解结构前几阶模态,以了解结构如何响应的情况,但是耗用的计算时间较多;Reduced Method(缩减法)采用 HBI算法计算特征值和特征向量,由于采用主自由度来计算,因此计算速度比子空间迭代法快,但精度较低;Unsymmetric Method(非对称法)用于系统矩阵为非对称矩阵的问题,如流体–结构相互作用问题;Damped Method(阻尼法)和 QR Damped Method(QR阻尼法)这两种方法用于阻尼不能忽略的场合,如轴承问题.大多数分析都可以使用子空间迭代法、分块的兰索斯法、缩减法,其他方法只有在一些特殊的场合才能用到.
本文采用适于计算大型对称特征值的 Block Lanczos Method(分块的兰索斯法)模态提取方法,该方法利用 Lanczos算法,采用一组向量来实现Lanczos递归计算.其计算式简便,程序简单,所需要存储单元少,精度高,且运算速度更快,对病态矩阵反应较好.
1.1 模态分析理论
模态分析是动态特性分析中的基础内容,它可以分析结构的振动特性,结构的振动特性只与结构自身的质量和刚度分布有关.如果系统结构受到外部激励源作用,就会作强迫振动,若激励源的频率接近于系统结构的固有频率时,强迫振动的振幅可能很大,这时系统结构就会发生共振.若导致系统结构共振的频率成分较为复杂,系统结构往往会在最易引起共振的频率上发生共振,而其他频率将被过滤掉.结构动力设计的一个重要方面就是通过合理调整结构的刚度和质量分布,避免结构在外部激励作用下发生共振.模态分析可以确定结构的自振频率和相应振型,为结构设计提供依据,提高结构系统的振动性能[5],进而提高结构的稳定性.
无阻尼结构自由振动的运动方程[6]为

式中:[]M为质量矩阵;[]K为刚度矩阵;{}˙˙X为加速度向量;{ }X 为位移向量.
如果结构以某一固定频率和模式振动,即

则有

代入运动方程,可得结构自由振动特征方程

显然,{}={}0f 为自由振动方程的一个解,但是这个解意味着结构的所有质点都处于静止状态.欲得到非零解,必须满足

1.2 模态分析步骤
模态分析包括建立有限元模型、施加载荷和求解、扩展模态和查看结果等步骤.
1.2.1 建立有限元模型
在ANSYS中,对于简单模型采用直接建立单元和节点以生成有限元模型的直接生成法较方便[7].对于本研究这种较复杂的模型,通常是先建立其实体模型,再网格化以得到有限元模型.这样做的优点是,由于实体建模所需处理的数据量较少,且支持对面和体使用布尔运算,能进行自由网格划分,因此对于三维实体模型更为合适.
将采用 Pro/Engineer软件建立的三维实体模型保存为 IGES格式,再通过 ANSYS打开,以获得实体模型.写字机构的三维实体模型见图 1.写字机构用于小方坯的横向单行标识,根据方坯尺寸横向导轨可移动长度约为 110,mm,其纵向仅需微调,可以忽略不计,为了使写字机构受力合理,将支撑架固定于纵向单轴机器人的中间部位.工作部分的长、宽、高分别为 350、160、90,mm,纵向和横向单轴机器人长度分别为 540、740,mm,纵向和横向驱动电机尺寸相同,长、宽、高分别为 120、80、80,mm.支撑架尺寸见图 2,支撑架的中间部分为 60,mm×60,mm×5,mm的冷弯矩形空心型钢.
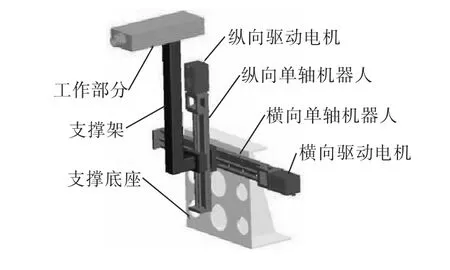
图1 写字机构的三维实体模型Fig.1 Three-dimensional entity model of the writing mechanism

图2 支撑架尺寸Fig.2 Dimension of the bracket
1.2.2 网格划分
对实体模型进行网格划分可得到有限元模型.本文选择Solid45 3-D实体单元,由8个节点定义,每个节点3个自由度,该单元有塑性、徐变、膨胀、应力强化、大变形和大应变能力,提供带有沙漏控制的缩减选项,满足分析要求.另外,横向单轴机器人的滑块(轴承)与中间传动轴和导轨之间发生接触,在此定义2个接触对:接触对1中,滑块的圆孔表面定义为接触面(用CONTACT174单元表示),传动轴的表面定义为目标面(用TARGET170单元表示);接触对2中,滑块的下表面定义为目标面(用 TARGET170单元表示),导轨的上表面定义为接触面(用 CONTACT174单元表示),纵向和横向单轴机器人的处理相同.在面面接触分析时,为避免引起病态条件,计算时选择增广拉格朗日算法.写字机构主体的材料均为Q235,其杨氏模量为 200,GPa,泊松比为 0.3,材料密度为7.8,g/cm3.本文采用6级精度的SmartSize进行自由网格划分,所得有限元模型见图3.

图3 写字机构的有限元模型Fig.3 Finite element model of the writing mechanism
1.2.3 施加载荷与求解
给结构施加的载荷要符合实际状况.模态分析中只能施加零位移约束,对于非零的位移约束,程序将以零约束代替.除位移约束以外的其他载荷则被程序忽略.不施加任何约束的结构在模态分析中可以得到相应的刚体模态(频率为0).
由于写字机构是将支撑底座固定于机架工作的,因此对写字机构进行模态分析施加的零位移约束在支撑底座的两个螺纹孔表面.模态分析中,低阶振型对结构的动态特性起决定作用[8].实际中的连续结构体振型应该是无穷多的,经典理论认为,实际工程中能够对结构安全产生影响的往往只是低阶的频率振型,所以只要结构避开低阶共振区就能安全运行[9].因此,选择 Block Lanczos方法提取写字机构的前 7阶模态,求解固有频率和振型.
1.2.4 模态分析的结果
写字机构的第1阶至第7阶的固有频率见表1.

表1 写字机构的固有频率Tab.1 Natural frequency of the writing mechanism
写字机构的前7阶模态振型图见图4.



图4 写字机构的前7阶模态振型图Fig.4 The first 7 natural frequency vibration mode of thewriting mechanism
写字机构的 1阶振型为喷涂工作部分以及支架沿着Y轴的前后摆动;2阶振型为喷涂工作部分以及支架沿着X轴的左右摆动;3阶振型为支撑底座及固定在其上面的横向单轴机器人沿着Y轴的前后扭转;4阶振型为纵向单轴机器人沿着 Y轴的前后摆动;5阶振型为喷涂工作部分以及支架绕着 Z轴的扭转;6阶振型为纵向单轴机器人沿着X轴的左右扭转;7阶振型为横向单轴机器人沿着Z轴的上下扭转.
通过分析写字机构的前7阶振型,可知支撑架的横、纵向刚度较低,需要对其进行优化.方法是在支撑架的顶部 4个面上增加 4块小肋板和增加支撑架的钢板厚度,以提高其刚度,减小其振动变形量,使其在工作过程中不会因为振动过大而影响标识效果,从而保证标识工作的顺利进行.
改进后写字机构前 7阶模态的固有频率见表2.当外部激励的频率接近表 2中的固有频率数值时,就有可能发生共振现象,从而引起机械结构的过大变形甚至失效,造成不可预计的损失.因此在标识工作中,应避免出现与表2中频率相近的频率.

表2 改进后的写字机构的固有频率Tab.2 Natural frequency of the improved writing machine
改进后的写字机构的前2阶模态振型见图5.分析表 2、图 5可知,改进后写字机构的固有频率有了一定的增加,刚度提高,有效地减小了写字机构的振动变形量,其振动也随之减小,实际工作时的标识效果得到保障.
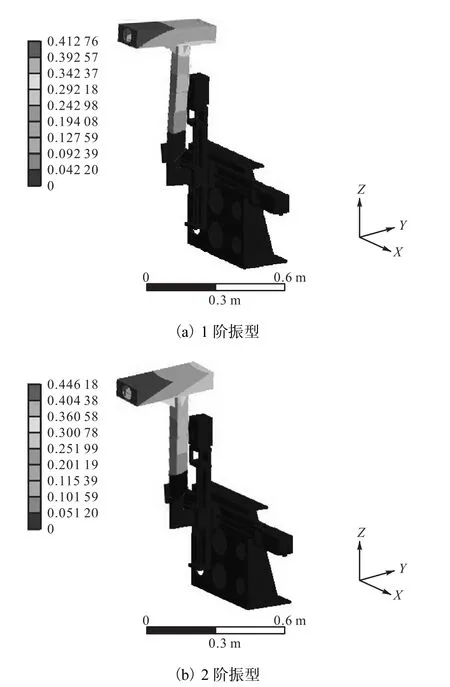
图5 改进后写字机构前2阶模态振型图Fig.5 The first 2 natural frequency vibration mode of the improved writing mechanism
2 运动学分析
采用 Pro/Engineer软件中的 Mechanism模块对写字机构进行运动学分析[10].运动分析结果不但可以是动画形式,还可以以参数形式输出,同时也能够较方便地对零件进行修改,提高机构的运动特性.
2.1 运动学模型的建立
Pro/Engineer软件拥有强大的三维实体建模能力,可进行各模块设计.用于分析的Mechanism模块为其内置模块,不用再进行文件格式转换,从而避免造成相关重要参数的丢失,影响分析的结果.
在 Pro/Engineer中建立写字机构各个部件的实体模型,包括支撑底座、横向单轴机器人、纵向单轴机器人、横向驱动电机、纵向驱动电机、喷头支架以及喷头工作部分.在写字机构模型中去除了螺栓、销钉、导向平键以及其他不必要的部件,这样不仅简化了实体模型,而且有利于后续的分析.
建立完写字机构各个部件的模型后,再将其装配为整体模型.在进行装配的过程中,先将支撑底座用刚性约束固定在原点,再将横向单轴机器人固定在其上面.需要注意的是,需要将单轴机器人中的滑块和滚珠丝杠添加滑动杆约束,然后再将纵向单轴机器人固定在横向单轴机器人的滑块上;同样也需要在其滑块与滚珠丝杠之间添加滑动杆约束,最后再将喷头支架和喷头工作部分固定在纵向单轴机器人的滑块上,从而完成整个装配过程.得到的模型如图6所示.

图6 写字机构的动力模型Fig.6 Dynamic model of the writing mechanism
2.2 运动学分析结果
本写字机构用于在横向书写一行文字,主要是横向移动,而在纵向上仅仅是进行微调,移动的距离较小,可以忽略,所以在分析之前仅定义横向伺服电机的相关参数,然后观察喷头的速度、位移和加速度曲线.根据有关分析和计算,可以得到横向单轴机器人的相关运行参数,见表3.

表3 横向单轴机器人的运行参数Tab.3 Motion parameters of the horizontal single axis robot
在仿真中,横向单轴机器人运行 1个周期(3,s)后停止.根据 HIWIN公司的单轴机器人手册(KK8610C–740–F4C 精密线性模组)及实际写字需要,使横向单轴机器人效率最高的运动方式为:横向以 5,m/s2的加速度加速运动,然后再以 0.5,m/s的速度匀速运动,最后再以-5,m/s2的加速度减速运动,并且往返一次,作为 1个周期.经过对写字机构进行运动学分析,可以得到喷头的速度及加速度曲线,如图7所示.
根据速度曲线可知:在1个周期的运行过程中喷头的速度发生了多次变化,包括 3次匀速运动、2次波形变化以及两次急剧转折;在0.1,s时,速度达到最大,为 0.707,m/s;在 0.72,s时,速度达到第 1个波谷值,为0.5,m/s;在1.38,s时,速度达到第2个波谷值,为0.424,m/s;在1.34,s和1.42,s时,速度出现2次急剧转折,值为 0.509,m/s.产生这种现象的原因主要是由于横向方向上的驱动电机的加速度变化较快,并且在完成初始阶段的第1次加速之后,在接下来的运行过程中,所提供的加速度不同步.
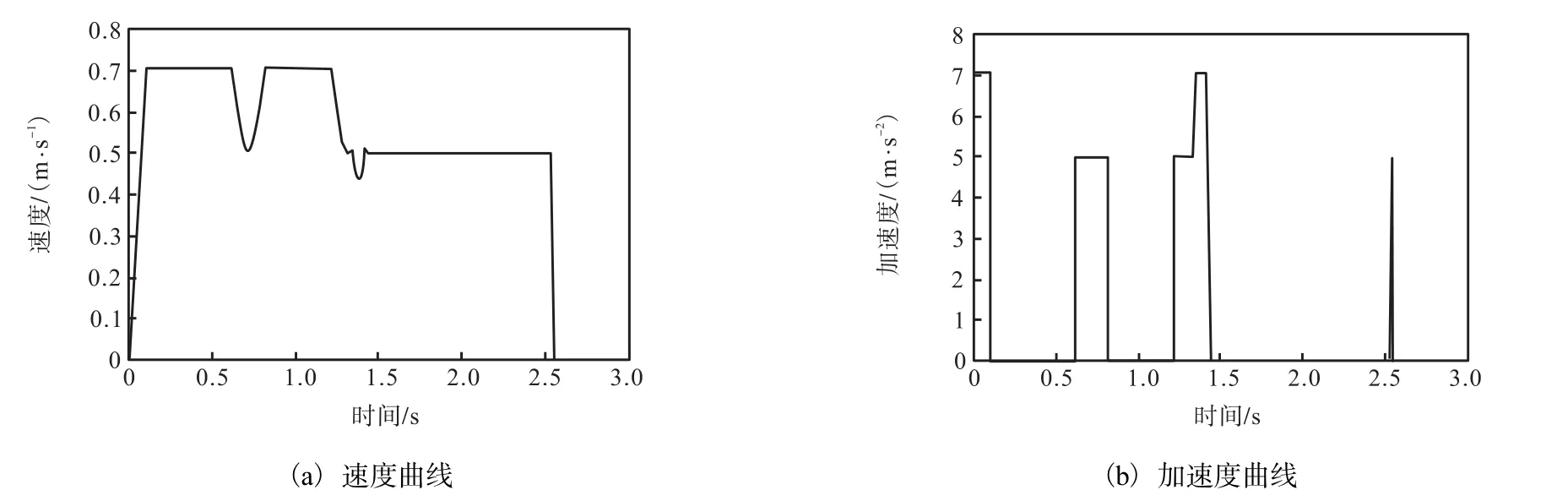
图7 运动学分析结果Fig.7 Results of kinetic analysis
为了安全起见,应使写字机构中的喷头拥有更好特性的速度曲线,可以通过减小横向伺服驱动电机的加速度及延长其加速时间来减缓喷头速度的剧烈变化,使其不至于因为喷头部位的速度变化过快而产生振动,从而对喷涂标识结果产生影响.图 8为采用本设备的实际标识效果.得出了标识喷头的位移、速度及加速度曲线,为伺服电机的控制提供了相关依据.
图8 实际标识效果Fig.8 Actual results
3 结 语
模态分析和运动学分析是确定写字机构动态特性的重要环节.采用有限元分析软件ANSYS对其进行分析,得出了写字机构整体的前7阶固有频率和振型,并对其振型图进行分析,为改进和优化其结构提供了一定的理论依据.在进行运动学分析时,首先通过 Pro/Engineer软件中的 Mechanism模块建立了写字机构的运动学模型,然后再对其进行运动学仿真,
[1] 姜晓勇,项占琴,梁剑新. 热轧钢坯喷号机的研制[J].工程设计,2001,29(4):191–194.
[2] 黄伟. 热钢坯电弧喷涂标记系统的研制[D]. 杭州:浙江大学,2008.
[3] 张志胜. 热钢坯电弧喷涂标记系统优化研究[D]. 杭州:浙江大学,2010.
[4] 旻傅 ,张恒,潘存海. 新型钢坯电弧喷号机的研制[J].天津科技大学学报,2012,27(1):57–61.
[5] 池振坤,杨俊智,周强,等. 基于 ANSYS Workbench 的大板式方舱模态分析[J]. 汽车工程学报,2011,1(3):226–229.
[6] 尚晓江,邱峰,赵海峰,等. ANSYS结构有限元高级分析方法与范例应用[M]. 北京:中国水利水电出版社,2008:210–211.
[7] 邓凡平. ANSYS10. 0 有限元分析自学手册[M]. 北京:人民邮电出版社,2007:68–69.
[8] 周大帅,吴良生,陈永波. 基于模态分析的压榨机框架的优化设计[J]. 机械设计与制造,2009(6):36–38.
[9] 旻傅 ,张树良. 轮毂喷码机喷头联接管的静强度及模态分析[J]. 天津科技大学学报,2013,28(1):63–66.
[10] 方建军,刘仕良. 机械动态仿真与工程分析:Pro/Engineer Wildfire 工程应用[M]. 北京:化学工业出版社,2004.
猜你喜欢
力学与实践(2022年5期)2022-10-21 08:10:34
兰州交通大学学报(2022年2期)2022-04-26 10:19:12
矿产勘查(2020年2期)2020-12-28 00:23:36
学生天地(2020年27期)2020-06-09 03:09:46
工程与建设(2019年1期)2019-09-03 01:12:38
特种结构(2019年2期)2019-08-19 10:05:52
快乐语文(2019年12期)2019-06-12 08:41:54
中国生殖健康(2019年11期)2019-01-07 01:27:50
创新作文(小学版)(2018年19期)2018-11-30 01:56:14
电子测试(2017年12期)2017-12-18 06:35:42