基于灰色系统非线性参数辨识算法的仿真分析
2014-05-07 02:16刘迪张凯李建海孙艳丽
船电技术 2014年10期
刘迪,张凯,李建海,孙艳丽
基于灰色系统非线性参数辨识算法的仿真分析
刘迪1,张凯1,李建海2,孙艳丽2
(1. 海军航空工程学院 控制工程系,山东烟台 264001; 2. 海军航空工程学院 基础实验部,山东烟台 264001)
针对具有非线性的外部干扰的控制系统参数辨识问题,提出了一种基于灰色补偿理论的PID控制算法。通过灰色补偿对控制系统非线性部分建立灰色模型,实现对PID参数的最佳整合。仿真研究表明,该控制算法可以提高PID控制质量及其鲁棒性,具有更高的控制品质和更强的抗干扰能力。
灰色补偿 非线性 控制策略 反馈 参数辨识;
0 引言
在实际过程中存在着大量的非线性系统,尽管其中有些系统可以用线性模型来描述,但是这仅仅是一种近似或者只限于某一范围内成立。一般来说,只有用非线性模型才能对非线性系统给以适当的描述。随着对实际系统的预报和控制精度要求的提高,在许多非线性系统特征明显的情况下,单凭提高基于线性化的模型阶数已经不能满足实际需要,必须尽可能建立实际系统更为精确的非线性数学模型,所以研究非线性系统的建模方法有很重要的意义[1]。灰色系统理论在实施抽象系统的控制上独树一帜。该理论实际上也是从系统的角度来研究信息间的关系,研究如何利用已知信息去揭示未知信息,所以也就是灰色系统的白化问题。其实质是,运用灰色系统理论的思想和方法,将抽象的现象或因素予以量化,对数据进行处理,对未来进行定量预测和决策,从而完成系统分析[2]。
1 连续系统灰色PID位置跟踪理论
设连续系统的数学表达式为:


取输入信号为:

离散化:

式中,为输入信号频率,为采样时间。
控制过程分为两个阶段:
1)采用PID控制进行灰色预测



按最小二乘法公式,求得:

其中,

2)采用灰色PID控制
加入补偿控制u,

在第二个阶段,要使估计器停止工作[5]。
状态方程为:


2 灰色补偿控制的基本结构
灰色补偿控制的基本结构图如图1所示,它将传统的PID控制和灰色补偿控制相结合,在传统控制回路中增加了一个灰色补偿控制器[6]。该补偿控制器以灰色补偿理论为基础,根据控制系统输出响应与期望输出之间的差值作为反馈信息,并结合控制系统行为数据的变化趋势,对传统控制方法的控制输出进行动态补偿,保证控制系统的高精度控制。
3 仿真研究
仿真将研究PID制、PID控制+灰色补偿控制二种控制方法在相同PID控制器参数下的方波响应。被控对象采用二阶传递函数为:

采样时间为2 ms。任意确定一组PID控制器参数如下:, , 。灰色补偿控制器的参数如下:,,,。
仿真结果如图2、图3。
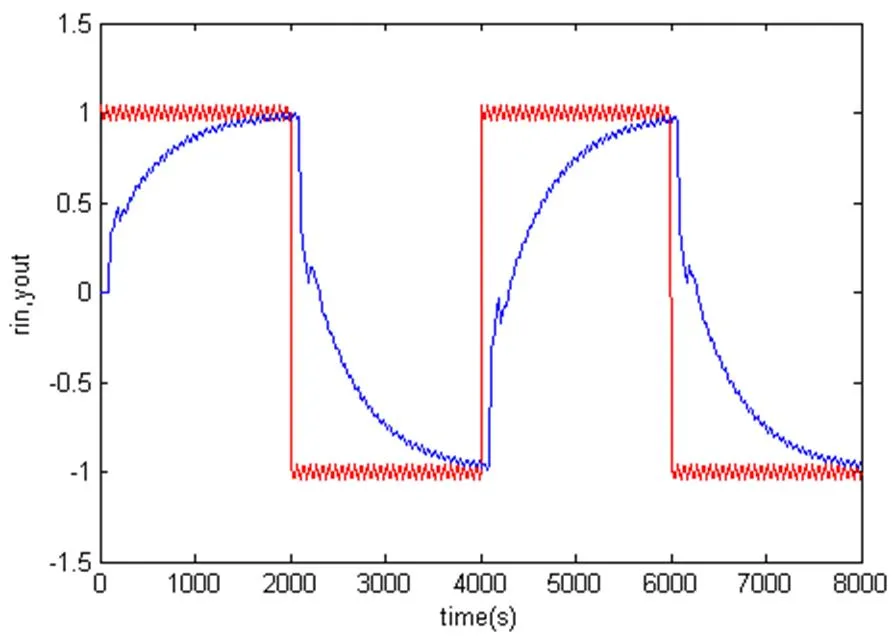
图2 常规的PID控制策略方波响应
从图3与图2的比较中可以看出, 相对于常规的PID控制策略, 在出现扰动时, 采用灰色补偿PID控制策略的系统所需要的调节时间较短、精度高。抗干扰能力要优于常规的PID控制策略。对干扰参数进行了有效的补偿。
4 结论
在相同的PID控制参数下,灰色补偿PID控制方法的控制精度明显优于常规PID控制,获得了理想的控制效果。证明该控制方法是可行的、有效的,该控制方法简单,易于实现,控制算法具有较好的鲁棒性。
[1] 张志勇, 文桂林. 时变时滞系统的灰色预测非线性PID控制[J]. 系统仿真学报, 2009, 21(5): 2642-2645.
[2] 张广立, 付莹, 杨汝清. 一种新型自调节灰色预测控制器[J]. 控制与决策, 2004, 19(2): 212-215.
[3] 刘威, 肖军, 翟春艳. 基于改进灰色预测模型的自适应PID控制算法[J]. 科学技术与工程, 2010, 10(2): 499-504.
[4] 赵弘, 林立, 董霞. 基于反馈线性化的非线性气动伺服系统跟踪控制[J]. 系统仿真学报, 2005, 17(4): 993-996.
[5] 刘金琨. 先进PID控制及Matlab仿真[M]. 北京:电子工业出版社, 2003, 355-359.
[6] 邓聚龙. 灰色控制系统[M]. 武汉: 华中理工大学出版社, 1993, 251-279.
Simulation Analysis of Nonlinear Parameter Identification Algorithm Based on Gray System
Liu Di1, Zhang Kai1, Li Jianhai2, Sun Yanli2,
(1. Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, Shandong, China; 2. Department of Basic Experiment, Naval Aeronautical and Astronautical University, Yantai 264001, Shandong, China)
TP312
A
1003-4862(2014)10-0033-02
2014-04-08
刘迪(1983-),男,讲师。研究方向:自适应控制、计算机控制。
猜你喜欢
小学生学习指导(低年级)(2020年3期)2020-06-02
纺织科学研究(2020年1期)2020-05-21
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
制造技术与机床(2017年6期)2018-01-19
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
为了孩子(3~7岁)(2016年8期)2016-05-14
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11