
贴片机核心部件贴装头的设计技术进展
2014-05-06 06:36王剑薇吴文镜
湖南工业大学学报 2014年1期
王剑薇,吴文镜
(1. 中国人民解放军空军第一航空学院 电子技术教研室,河南 信阳 464000;2. 中国机械工业集团有限公司 科学技术研究院有限公司,北京 100080)
贴片机核心部件贴装头的设计技术进展
王剑薇1,吴文镜2
(1. 中国人民解放军空军第一航空学院 电子技术教研室,河南 信阳 464000;2. 中国机械工业集团有限公司 科学技术研究院有限公司,北京 100080)
阐述了全自动贴片机的核心部件贴装头的主要设计技术,即传统设计、整体化设计及模块化设计。针对模块化设计,提出了多种单模块设计方案。同时,指出模块化设计、直接驱动技术是未来贴装头设计的主要发展方向。
贴片机;贴装头;模块化;表面贴装技术
1 贴片机及贴装头
我国电子产品制造业的发展速度较快,近年来,其平均增长速度超过20%。在电子信息产业快速发展的推动下,我国表面贴装技术(surface mount technology,SMT)及其生产线也得到了迅猛的发展。自动贴片机是表面贴装技术的关键设备之一,其市场需求量年均增长速度达27.2%。截至2012年底,我国共进口自动贴片机1万多台,交易金额达17亿美元[1]。目前,我国自主开发的自动贴片机还处于试用期,市场上的自动贴片机几乎全部依赖进口。
SMT贴片机实际上是一种精密的工业机器人,是“机-电-光”以及计算机控制技术的综合体。其通过拾取、位移、定位、放置等功能,在不损伤原件和印制电路板(printed circuit board,PCB)的情况下,通过视觉处理和运动控制系统联合作用,将表面贴装器件(surface mounted devices,SMD)元件快速而准确地贴装到PCB板指定的焊盘位置上[2]。贴片机的发展直接影响着表面贴装技术的发展。贴片机在国外已经更新换代多次,目前,市场上大部分贴片机设备为高速高精密全自动贴片机。贴片机种类繁多,但其基本组成结构相同,其结构如图1所示。
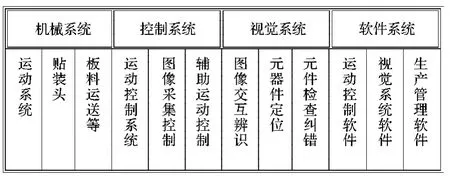
图1 贴片机系统组成Fig.1 Components of surface mounting machine system
其中,贴装头是贴片机的核心部件,其完成的功能有Z向直线运动、θ角转动、芯片吸取与放置。Z向直线运动完成芯片吸放时的上下运动,θ角转动完成芯片的偏置校正。目前,市场上主流产品的贴装速度为5 000~20 000片/h ;贴片精度为:绝对精度±0.05mm,重复精度±0.03mm,Z轴精度0.05mm;θ角转动最小角位移为0.01°[3]。
为提高贴装速度,目前的技术一般是将多个贴装头组合在一块。表1为简单组合头的每个元件贴装速度,其反映了不同头数对贴装速度的影响。从表1中可以看出:头数越多,速度越快,但是随着头数的增加,复杂性增加,贴装头整体的惯量增大,影响X-Y轴的加速度与速度,对于整机的功率要求也相应增大。目前,国外一般采用8头或者更多的贴片头[4]。
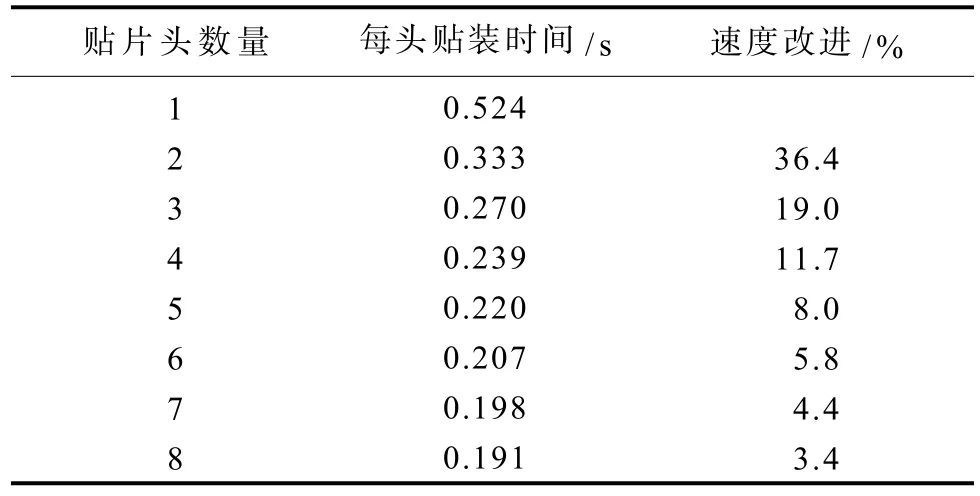
表1 简单组合头的每个元件贴装速度Table 1 Mounting speed of each component of simple combination head
目前,该技术为国外西门子(Siemens)、雅马哈(Yamaha)等大型企业所掌握,国内少数公司及单位也开始研发贴片机,但是贴装头则完全依赖进口。
2 贴装头设计技术
2.1 传统设计
根据传统设计思路设计的贴装头如图2所示,其内含2个贴装头,体积较大。单电机、离合器实现双头Z向控制,单电机、同步带实现转角双头同时控制。该设计思路设计的贴装头,整体机械总成体积大,不易扩展,贴装速度较低。

图 2 贴装头传统设计Fig. 2 Traditional design of surface mounting head
2.2 整体化设计
为减小体积,提高贴装头数目,出现了一种阵列式贴装头[5]的设计方案(见图3)。在该方案中,Z轴通过微型空心轴气缸加Z轴电机实现,其中,Z轴电机通过丝杠带动8轴同时进行向微调,以适应不同厚度芯片的贴装任务;θ角通过一个电机进行8轴联调(其原理如图4所示);气路设计由空心轴气缸加上真空发生器和控制阀即可实现。

图3 贴装头整体化设计Fig. 3 Integrated design of surface mounting head

图4 θ角8轴联调原理图Fig. 4 Principle of 8-axis alignment of θ angle
这种整体化设计思路,将多轴贴装头系统作为一个整体来考虑,可降低成本,使整体机械总成体积极大减小,贴装头间距达25 mm,但是该设计思路增加了控制系统和软件系统的复杂性,而且贴装头无法扩展。
2.3 模块化设计
模块化设计思路充分利用模块化设计原理,其设计的贴装头如图5所示。微型模块化贴装头[6]以用户和市场实际需求为目标,实现了机械总成模块化和控制模块化;系统CANopen控制如图6所示,该系统的控制通过EPOS24/1控制器实现,EPOS24/1控制器是一种微型全数字智能运动控制器。该控制器在CANopen网络里作为从动装置响应主机命令,通过RS232端口与主机进行交互,通过单一RS232 端口的CANopen 网关技术,可将多达127轴的应用集成到统一的主机界面中。该方案采用二自由度(Z向+θ角)微型贴装组件,整个系统采用先进的控制算法和相应精确的电机执行设备,形成完整的控制回路,控制精度高,响应速度快,贴装速率高,整机体积尺寸小,可靠性高;模块化设计便于系统集成及系统优化;采用微型扁平状的贴装组件,使得各吸嘴轴间距极大缩小,贴装头机械总成的体积及质量极大减小。

图5 贴装头模块化设计Fig. 5 Modular design of surface mounting head
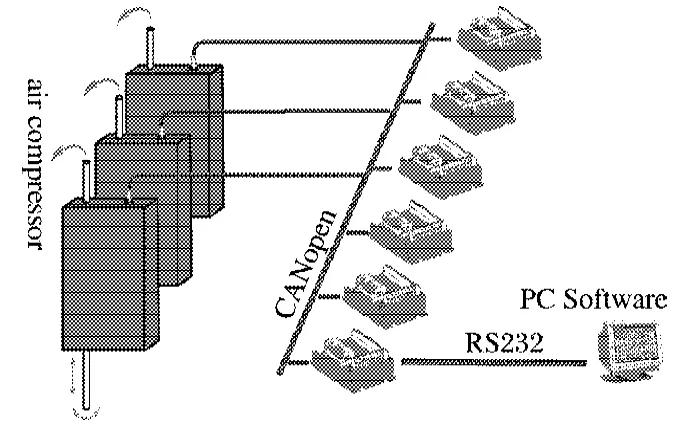
图6 系统CANopen控制Fig. 6 CANopen control of SMT system
3 单模块设计拓展
贴装头的模块化设计是未来贴片机的主要发展方向,故针对SMT产业开发出微型、高性能的贴装模块是全自动贴片机发展的必然之路[7]。
图7a为一种单模块的拓展设计,Z向运动通过Maxon直流电机、减速箱、多头微型丝杠传动控制实现,θ角通过Maxon电机、减速箱以及齿轮传动实现。整个系统加上真空系统可以完成芯片贴吸运动。该设计θ角采用半闭环控制,再加上齿轮的加工误差,因而θ向精度稍差。图7b为方案一(即图7a)的改进原理图,Z向和θ向机械解耦,可以提高θ向的精度。整个模块厚度达16 mm。

图7 Maxon单模块方案Fig. 7 Scheme of Maxon’s single module
图8a为采用音圈电机设计的贴装头模块[3]。一方面,由于音圈电机输出力大,可直接带动旋转电机及输出轴一起作Z向运动;另一方面,由于目前音圈电机成本较高,也限制了该方案的发展。图8b为直接驱动贴装头模块,这是一种二维电机模型,将转角和Z向移动合二为一,直接对空心电机轴实现二自由度伺服控制[8]。应用该二维电机进行贴装头设计可以极大减小贴装头的体积,同时,其舍弃了复杂的机械传动环节,有利于贴片机实现高速、高精度贴装。

图8 贴装头模块Fig. 8 Surface mounting head module
4 结语
贴装头是SMT贴片机的核心部件,其性能直接影响到贴片机的贴装速度与贴装精度。从传统设计到整体化设计,再到模块化设计,贴装头的性能不断提升,结构日趋优化。模块化设计使得贴装头的成本极大降低,并使之具有更高的适应性与可维护性;直接驱动技术提升了贴装头的性能,并且使其体积极大减小,同时更利于贴片机实现高速度与高精度贴装。模块化设计、直接驱动技术是未来贴装头的发展方向,两者的有机结合将会使贴片机具有更强的市场竞争力。
[1] 陈 澄. 模型参考自适应辨识方法在贴片机运动控制系统中的应用研究[D]. 苏州:苏州大学,2013. Chen Cheng. Application of Model Reference Adaptive Identification Method on Surface Mounting Machine Motion Control System[D]. Suzhou:Suzhou University,2013.
[2] 汤 雄,肖曙红,田 甜. 高速高效贴片机控制系统设计与实现[J]. 机械与电子,2013(7):44-47. Tang Xiong, Xiao Shuhong, Tian Tian. Design and Implementation of Control System for High-Speed High-Efficiency Placement Machine[J]. Machinery & Electronics, 2013(7):44-47.
[3] 付 宇. RFID标签封装设备贴装头设计与实现[D]. 武汉:华中科技大学,2011. Fu Yu. Design and Implementation of Mounting Head for RFID Label Packaging Equipment[D]. Wuhan: Huazhong University of Science and Technology,2011.
[4]姜凤鹏. 基于ADAMS和ANSYS的贴片机力学分析与结构优化[D]. 上海:上海交通大学,2008. Jiang Fengpeng. Dynamic Analysis and Structure Optimization of Surface Mounting Machine Based on ADAMS and ANSYS[D]. Shanghai:Shanghai Jiaotong University,2008.
[5] 北京航空航天大学. 高速全自动贴片机阵列式贴装头:中国,ZL200610089487.0[P]. 2006-06-29. Beijing University of Aeronautics and Astronautics. Array Mounting Head for High Speed Automatic Surface Mounting Machine:China,ZL200610089487.0[P]. 2006-06-29.
[6] 北京航空航天大学. 高速全自动贴片机微型模块化贴装头:中国,ZL200610089576.5[P]. 2006-07-04. Beijing University of Aeronautics and Astronautics. Mini Modular Mounting Head for High Speed Automatic Surface Mounting Machine:China,ZL200610089576.5[P]. 2006-07-04.
[7] 贾春艳. 贴片机研究与结构设计[D]. 哈尔滨:哈尔滨工程大学,2011. Jia Chunyan. Research and Mechanical Design of Surface Mounting Machine[D]. Harbin:Harbin Engineering University,2011.
[8]尹告民. SMT贴片机贴装头双自由电机研究和开发[D].广州:广州工业大学,2013. Yin Gaomin. Research and Development of Dual-DOF Motor for Mounting Head in Surface Mounting Machine [D]. Guangzhou:Guangzhou University of Technology,2013.
(责任编辑:徐海燕)
On Design Technology of Mounting Head of Surface Mounting Machine
Wang Jianwei1,Wu Wenjing2
(1. Electronic Technique Department,The First Aeronautical College of People’s Liberation Army Air Force,Xinyang Henan 464000,China;2. Science and Technology Research Institute Co., Ltd.,China National Machinery Industry Corporation,Beijing 100080,China)
Expounds the main design technologies on mounting head of surface mounting machine, including traditional design, integer design and modularization design, and proposes different design schemes of single module based on modularization design. Meanwhile points out that the modular design and direct drive technology are the main development direction of future mount head design.
surface mounting machine;mounting head;modularization;surface mount technology
TH162;TP273
:A
:1673-9833(2014)01-0022-04
2013-11-10
王剑薇(1981-),女,江西玉山人,中国人民解放军空军第一航空学院讲师,硕士,主要研究方向为半导体设备与微电子装备,E-mail:wwjww@163.com
10.3969/j.issn.1673-9833.2014.01.005
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05
齐鲁艺苑(2022年1期)2022-04-19
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中国药学药品知识仓库(2021年18期)2021-02-28
中学生数理化·高一版(2020年11期)2020-12-14
现代装饰(2020年5期)2020-05-30
家庭影院技术(2018年4期)2018-05-09
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
幼儿智力世界(2016年11期)2017-02-21
