
仿生科技前沿
2014-04-29 23:59:03沈英甲
环球飞行 2014年2期
沈英甲
“机器人”在辞书中的释义是“把操作和作业作为目的,能自动运行的机械或装置”,在广义上,能够自动进行各种各样操作的机械都可称为机器人。本文介绍的所谓“分子机器人”,望文生义就是在分子尺寸上制造的机器人。大致说来,所谓分子尺寸的机器人,其长短大小仅相当于1纳米左右,而1纳米是1米的十亿分之一,也就是其尺寸是1毫米的千分之一的千分之一。原子的大小大约在0.1 纳米左右,分子机器人当然就是把数十个或者数百个原子组合起来制成的机器人。
如果能使用如此微小的分子尺寸的机械,随意支配或者加工其他分子的话,那就是一件令科学家十分称心的事了。比如科学家可以制造与病毒作斗争的分子机器人,送入人体内后,清除构成病毒的分子,或者给予摘除或摧毁这样的物理性打击。
分子机器人的“发动机”
制造分子机器人的最初构想要回溯到半个多世纪前的1950年。美国著名物理学家理查德·费曼(1918~1988年)第一次提出,未来制造微小机械让其执行各种各样作业的设想将成为现实。尽管费曼并没有提出分子机器人的具体概念,但是从那以后,制造分子机器人就成为人类梦寐以求的理想。不过科学技术的发展进程并非轻而易举,把尺度只有1纳米的研究对象组装起来其难度可想而知,而且科学家组装起来的还必须是“把操作和作业作为目的,能自动运行”的机械。
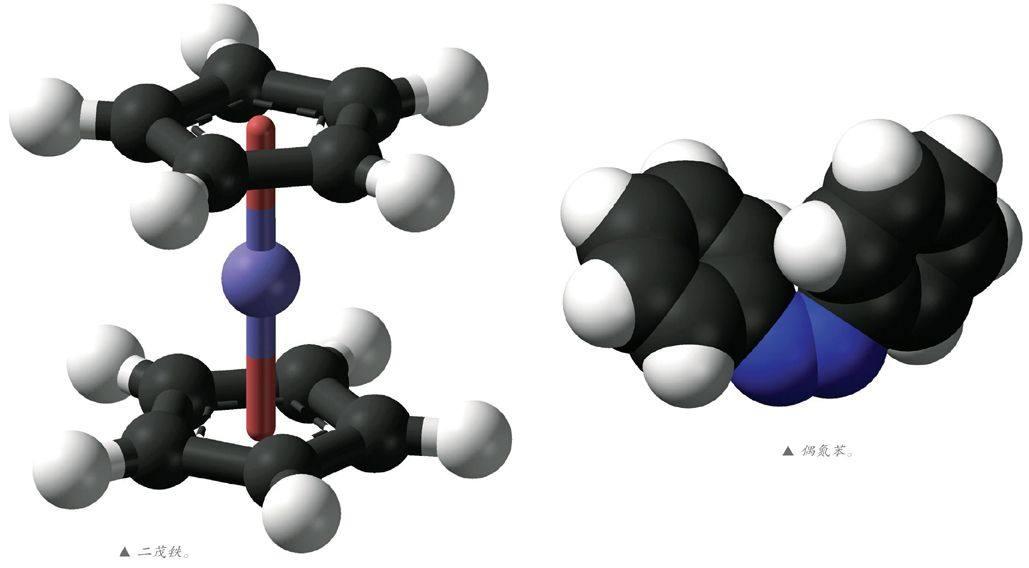
对于机械来说,要进行作业动力的提供是必不可少的。比如汽车要行驶必须由发动机来驱动,在分子机器人这个范畴中,若干种相当于发动机的装置正在研制中。代表性的装置可以试举几例。首先,有“偶氮苯”这样一种分子,它是将两个苯环用两个氮原子连接而成的。所谓苯环就是碳原子连接成六角形构成的环。有趣的是,偶氮苯对着光的时候其构造会发生变化,当对苯环照射紫外线的时候,苯环彼此之间的距离会缩短;当照射可见光的时候,苯环彼此之间距离会伸长。还以汽车为例,让偶氮苯构造发生变化的光相当于发动机燃烧的汽油,关键的是,如何让收缩和伸长这两个动作多次往复进行。如果能方便地利用这一变形机理,靠光运行的机器人就呼之欲出了。还有一种双环结构也是分子机器人“发动机”一个有代表性的例子,有人把其称为分子尺寸的智慧之环,似乎也恰如其分:其构造相当于两个环像锁链一样套接在一起,在它们相交的部位嵌入金属原子,一般是铜原子,这样就可以把它作为“发动机”使用。每个环易与金属原子结合的部分形成了精细构造,于是这个精细构造与金属原子紧密结合,环于是被固定。在分子与原子的结合过程中电子起着重要的作用,易与金属原子结合的环的精细构造,预先通过调整电子数和位置来确定。
两个环中,其中一个环设置有两组精细结构,另一个环有一个精细结构,两个环的精细结构都与金属原子相结合。在具有两组精细结构的环中处于不同位置的精细部分其中相容性好的一个与金属原子结合。一旦向双环结构施加电压或撤除电压,金属原子的电子数就会发生变化(发生氧化或还原反应),这样一来金属原子与精细构造部分结合的相容性也就会发生变化。结果,当每次施加或者撤除电压时,具有两组精细结构的环与金属原子结合的位置就会发生变化,于是这个双环结构就会反复不停地运动起来。
偶氮苯是受到光线刺激而发生运动有代表性的分子。而双环结构运动不仅靠光线而且还利用氧化还原反应,因此具有重要意义。其他我们所知道的还有利用某种有机酸的“环棒结构”,这种构造形象理解就是将一根棒状物穿入环中。利用氧化还原反应,使环沿着棒上设置的两处精细结构之间往来运动,这样就能或开或关像开关一样使用。目前在世界各国,比上述构想水平更高的“发动机”,甚至是完全独出心裁的分子机器人“发动机”都在研究中。
在一部机械中,用于传递动力的部件是必不可少的,如果不能把发动机的动力传递给轮胎,汽车便无法行进。目前科学家已经发现了许多可以用作分子机器人类似部件的分子,其中有与分子突出部位相啮合的类似齿轮的“部件” ,有以轴为中心进行旋转运动的“部件”,不一而足。
扭转分子的“分子钳”
分子机器人的“发动机”和部件的零星开发,正如目前我们已经知道的,那么使用这些“发动机”和部件组装的分子机器人,其发展到了何种程度呢?
最早被称为“分子机器人”的东西出现是在1980年,利用如前面所介绍的使用靠光来驱动的苯环,科学家研制了类似手术钳那样可夹可放的装置。由此可见,首次将对光这种刺激能做出反应的分子与具有手术钳夹放的功能结合起来,从费曼提出分子机器人的设想到变成现实,用了相当长的时间。目前,一些年轻的日本科学家研制成功了更为先进的分子机器人,这就是能够夹持分子,进而扭转使分子变形的“分子钳”。
分子钳的构造是这样的,“发动机”采用目前我们熟知的偶氮苯,以分子钳为例,偶氮苯相当于钳子的握把。把偶氮苯的动作传递给分子钳的前端起支点作用的“部件”是二茂铁,偶氮苯是五个碳原子连接而成的五角形环,将二茂铁夹在两个偶氮苯分子之间,形状就像三明治。我们知道,在机械中有一种使旋转运动平滑进行的部件,那就是轴承。与此相近,科学家在分子钳的前端采用了一种称为“锌卟啉”的部件,它具有易与碱性物质分子(与酸发生中和反应的物质)相结合的性质。
一旦使分子钳与碱性物质分子混合,分子钳的前端就会与碱性物质分子相结合(这里使用的是某种喹啉分子),这就相当于分子钳夹紧分子的状态。此时一旦照射紫外线,充当动力的苯环就会收缩,这个动作通过充当支点的二茂铁传递给分子钳前端的锌卟啉,分子钳的前端就会开启。进而当面对可见光时苯环伸长,于是分子钳前端闭合。分子钳做出这个动作后,与分子钳前端结合的某种喹啉分子的形态就会因分子钳前端的动作被迫扭转,由此实现扭转变形。
分子钳的开发具有重要意义,使用分子机器人对目标分子进行某些实际操作,这在世界上还是第一次,可以说对于今后分子机器人的开发迈出了关键性的一大步。
自然界的天然分子机器人
不过,本文中谈及的分子机器人说实话并非稀罕之物。一会儿说是最新科技一会儿说并不稀罕,这到底怎么回事呢?正确地说,“分子机器人在自然界并不罕见”。比如就拿我们人类的身体来说,由于分子生物学的进展,我们发现人体是微小的精密机械的组合体。DNA(脱氧核糖核酸)上记录了遗传信息的复制和蛋白质的合成。肌肉的张弛、神经网络的信息传输等,在人类所有生命活动中,如果能够从分子水平上观察,就可以看到正在运行的无数微小精密机械。
自然界中的分子机器人令人吃惊之处在于,它们是完全自动组装而成的,只要材料和环境条件具备,就能轻而易举地自动组装成分子机器人。目前人类掌握的技术已经能够在物质的表面一个一个地移动原子,但是要利用这种技术制造分子机器人能力还有所不及。地球生物历经数十亿年,进化成了即使是人类掌握的现代科学最尖端的技术也难以企及的系统。
制造分子机器人如同做饭
要人工制造分子机器人,其捷径仍然是模仿生物体中的分子机器人,由于分子机器人种类各各不同,材料姑且不论,由于温度、压力、酸碱度等条件复杂地掺杂其间,制造人工分子机器人,研制过程中难免会误入歧途错误百出,这也在情理之中。
为了制造分子机器人,首先做出设计是必要的。比如分子钳等,如果把作为“发动机”的偶氮苯,起到轴承作用的二茂铁,以及作为分子钳前端的锌卟啉组装起来,能否组成分子钳要做出大致的设计。设计结束后转入组装,将材料置入溶液中,加温的同时加入催化剂,要组装出像设计图上那样的分子机器人,一蹴而就不行要做足功课。有意思的是,有的科学家把这个过程比喻为下厨房。
不妨以制作汉堡包的情况为例,即便是同一种汉堡包,由于制作者本身口味好恶异同,做出来的东西自然会大相径庭千差万别。材料比例如何,掌握的火候如何,或者为了提味,有人可能还会加点酱油。以此来说明制造分子机器人的过程比较贴切,材料的比例和加工的火候,没有人能说得清楚。至于佐料,在制造分子机器人的时候就相当于添加催化剂吧。用了各种各样的方法,日本科学家成功制造出分子钳最终用了一年左右的时间。
分子机器人的应用
目前分子机器人的种类是有限的,不过我们可以考虑将来如何利用它们,从分子机器人能够从生物体内自动生成来设想,其最初的应用似乎应是以医疗等领域为中心。比如本文开头介绍的针对病毒的分子机器人,也许可以通过研发分子钳予以实现。加工分子钳前端的部件,使它只能与特定的病毒相结合,如何将这种设想变成现实的确是个难题,但绝不是梦想,有可能使用某种能够透过人体的近红外光使分子钳动作,而且有希望利用药物投放系统,向癌肿部位集中送达药剂等。在分子钳那样的分子机器人上携带药剂,使它们在患病部位周围投放药剂。
除了分子钳,其他种类分子机器人的研制也在进行中,一旦有了成果,那么物质能够出入的人工细胞膜,以及能伸缩自如的人工肌肉就可以变成现实。不仅医疗领域,我们也可以期待分子机器人在工程方面的应用,比如可以让前面提到的某种有机酸作计算尺上的滑标那样的显示“开”或“关”状态的往复运动,把这种分子机器人作为电子计算机的记忆元件加以利用的尝试也有人在进行。如能成功的话,就能够实现电子计算机的高性能化和小型化。最终,让分子和原子的排列像我们希望那样变化的分子机器人也有可能问世。再发挥一些想象,使用分子机器人将空气、水和土壤中的分子和原子重新排列,制造出粮食未必不会变成现实。听起来十分遥远,不过当前可以利用分子机器人培育作物,为人类提供粮食。
正如现在所知道的,分子机器人极有可能实现,但是眼前对于如何制造分子机器人科学家还知之甚少。事实上,许多领域还是尚待研究的空白,比如如果对生物体内自动生成的分子机器人的研究更进一步,也许会对人工制造分子机器人提供更多的研究线索。有人戏称,制造分子机器人的过程很像炒菜做饭,不过随着对分子机器人研究的深入,科学家期待着能够掌握制造分子机器人的最终诀窍。
猜你喜欢
中学化学(2022年5期)2022-06-17 16:51:48
成都大学学报(自然科学版)(2021年1期)2021-05-22 01:31:18
高中数理化(2020年1期)2020-02-29 02:21:18
制造技术与机床(2018年9期)2018-09-19 06:48:16
四川师范大学学报(自然科学版)(2018年2期)2018-04-28 02:21:08
海外华文教育(2017年6期)2017-08-07 03:11:00
水电站机电技术(2016年1期)2016-02-28 14:21:50
中国粮油学报(2016年1期)2016-02-06 02:17:09
化工进展(2015年6期)2015-11-13 00:26:50
昌吉学院学报(2013年1期)2013-12-08 07:36:22
