一例典型高速公路追尾事故仿真再现与分析
2014-04-28 07:42丰烨
山东工业技术 2014年16期
丰 烨
(承德石油高等专科学校汽车工程系,河北 承德 067000)
一例典型高速公路追尾事故仿真再现与分析
丰 烨
(承德石油高等专科学校汽车工程系,河北 承德 067000)
本文对可视化车辆行驶记录仪所记录的一例高速公路追尾事故进行过程分析,并根据过程分析表利用PC-crash对事故进行仿真再现,最后分析事故原因以及避免事故发生的避让条件,得出足够的行车距离是保证高速车辆行驶安全的必要条件,或者配置电子防撞系统实现提前制动预防追尾事故的发生。
追尾事故;仿真再现;避让条件
1 引言
在本文,将安装有VDR的车辆称为A车,与A车发生事故的车辆称为B车,其他车辆称为C车。利用事故仿真软件PC-crash对事故进行仿真分析,再现事故过程,再通过改变参数分析事故回避条件。
2 事故过程分析
根据VDR记录事故发生前后各项信息,对此追尾事故发生过程进行分析[3][4],如事故分析表(表1)所示:
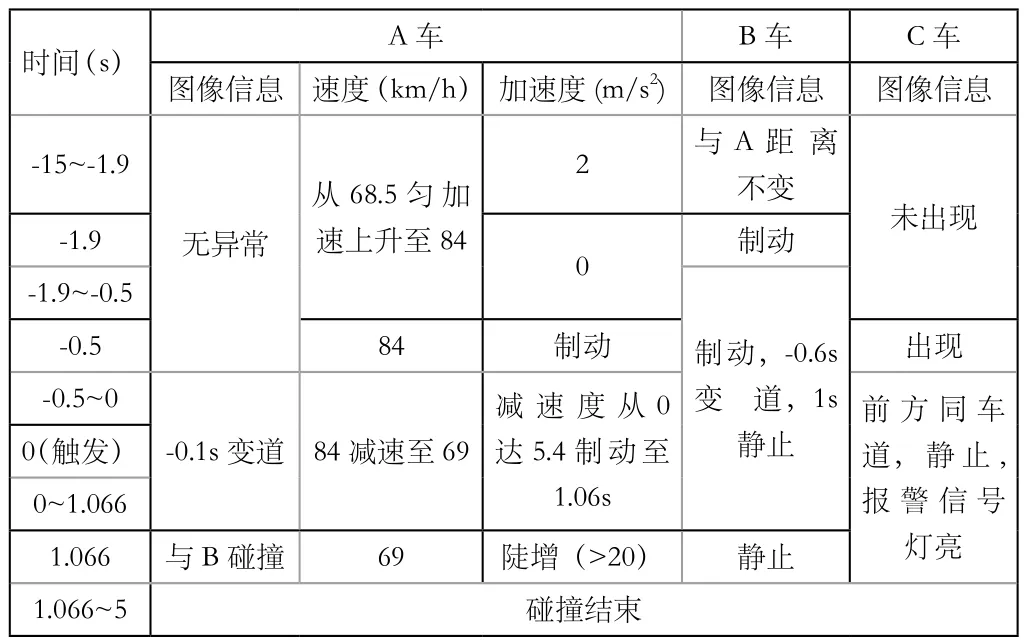
表1 事故过程分析表
3 利用PC-crash对事故仿真再现
3.1 参数设置
A车参数设置:根据表一设置仿真时A车所需数据。
B车参数设置:制动前速度设为84km/h(同A);制动减速度为7.6m/s2,刹车同时变道。
其他:干燥沥青路面,附着系数为0.8;C 车停在A 和B 车变道之前所行驶车道。
3.2 仿真结果
根据给定参数在PC-CRASH中对事故进行仿真调试,得出最优仿真结果:
B车刹车时A、B两车相距约27.1m;
两车碰撞时位置及最终位置仿真结果如图1所示,与VDR记录信息基本一致。
4 事故原因分析与回避分析
4.1 事故原因分析
根据事故分析表以及PC-crash的仿真再现,可以从中得出事故发生原因:
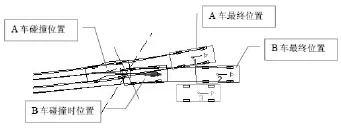
图1 仿真碰撞及最终位置
(1)A 车驾驶员不当的驾驶行为:A 车在高速公路上持续加速行驶,车速达到84km/h,没有与前方车辆保持足够的安全距离,两车之间距离仅为27.1m,远远低于道路交通法规要求的100m。
(2)B 车驾驶员不当的驾驶行为:B 车在A车前方行驶,驾驶员发现C车停车占用行车道而没有给后方车辆提示信息,反而在紧急刹车变道之后停车直接导致事故发生。
(3)C 车:在高速公路上出现问题停车,占用行车道。(4)环境影响:天气阴,能见度不高。
4.2 事故避让条件分析
根据VDR记录参数,在PC-crash 中仿真将事故再现分析,通过改变其中某参数来分析通过哪种途径可以有效避免事故发生:
(1)提前制动:当A 车提前1秒制动,可避免事故发生;
(2)增大A与B之间距离:当两车之间距离最少增加至48m时可避免事故发生;
(3)增大制动减速度:由于汽车与路面间附着系数最大可达0.8,车辆可达到的最大制动减速度为7.84m/s2当将A 车减速度调至最大也无法避免事故,因此,不能通过增大制动减速度的方式回避事故。
5 结束语
遇到紧急情况提前制动是避免事故发生的最有效途径,而提前制动受制于外部条件,比如本文中的案例,以A车驾驶员的角度无法提前预知C车的情况,而电子预碰撞安全系统(如沃尔沃的城市安全系统以及丰田公司的PCS系统等)会第一时间勘测到C车情况,继而强制汽车提前制动从而避免事故的发生,因此预碰撞安全系统对行车安全有很大的帮助。
[1]成波,林庆峰.利用可视化车辆行驶记录仪进行交通事故/冲突的研究[C].2008中国汽车安全技术国际研讨会论文集:443—447.
[2]赖俊科,成波.图像式汽车行驶记录仪在交通冲突成因分析中的应用[J].中国农业大学学报:8,13(05):97—102.
丰烨(1984—),教师,讲师,研究方向:汽车安全。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
承德医学院学报(2022年2期)2022-05-23
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
活力(2019年22期)2019-03-16
中华诗词(2017年3期)2017-12-01
科技与创新(2017年3期)2017-03-17
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年23期)2015-12-08
人间(2015年21期)2015-03-11