智能餐厅服务系统机器人设计
2014-04-27 08:44郝永江王春军秦明明柳理定
科技视界 2014年7期
郝永江 王春军 秦明明 柳理定 代 超
(西安文理学院 物理与机械电子工程学院,陕西 西安710065)
0 引言
智能餐厅是科技创新,物联网技术发展的必然产物[1]。智能机器人是智能餐厅服务系统的关键,直接关系到该系统能否实现完全智能化服务。与国内外现有餐厅服务机器人相比较,该机器人不仅具有个体适中、成本低等特点,而且基于单片机控制,简单实用,送餐稳定,定位准确,语音与显示可以同步提示顾客取自己所需的餐饮,使得整个餐厅服务稳定而自动化运行,达到智能化餐饮服务的效果。
1 结构设计
智能机器人在测控系统控制下能实现自主送餐全过程,自厨房出发自动移动到对应餐桌定位后,餐盘旋转90°,提示顾客取餐,取走后,餐盘归位,回到厨房控制中心等待下次送餐。整体结构大致包括载物盘、支撑板、控制电路板、无线收发模块四个部分。其模型结构简图如图1所示。
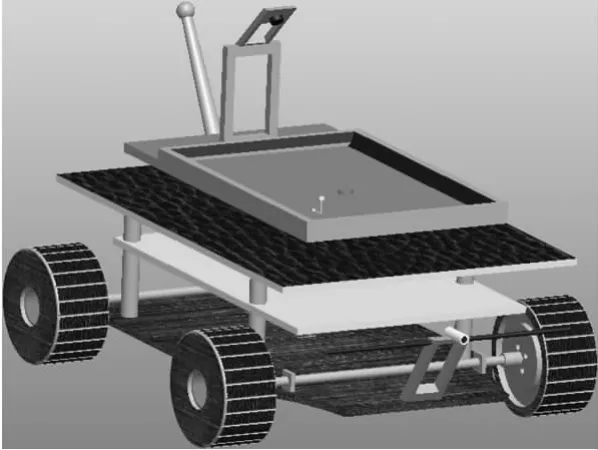
图1 模型结构简图
2 测控系统硬件设计
智能机器人采用飞思卡尔公司的MC9S12单片机为核心控制芯片[2],由电磁传感器检测路径,再通过放大器放大微弱信号传输到单片机的AD通道,经过数据处理实现机器人的方向控制,加以驱动就可以使机器人循迹行驶,同时配备检测、定位和语音等功能。51单片机辅助实现餐桌号接收及显示功能。机器人测控系统硬件包含:①信息采集模块;②驱动模块;③显示模块;④语音模块。其结构框图如图2所示。
2.1 信息采集模块
智能机器人是通过前端两个电感检测地面铺设的频率为50Hz的交流信号实现循迹的。将检测到的电压信号经运算放大器放大,送入主控单片机的AD通道进行处理。利用红外探测器检测车体前方障碍,一旦发现障碍就会触发单片机中断。通过干簧管检测餐桌旁的强磁铁个数[3],来区分不同的餐桌。其电气原理图如图3所示。

图2 测控系统硬件结构框图

图3 采集模块电气原理图
2.2 驱动模块
驱动模块执行单片机的PWM信号。电机驱动采用BTS7970[4],接收MC9S12单片机P3、P7口输出的PWM信号实现餐车移动。方向舵机驱动接收P5口的PWM信号实现方向控制。餐盘舵机驱动接收P1口的PWM信号实现餐盘转动匀滑准确。驱动模块电路如图4所示。
2.3 显示模块
显示模块采用12个8×8点阵构成LED显示屏。点阵内部结构及外形均为8×8点阵,共由64个发光二极管构成,且每个发光二极管是放置在行线和列线的交叉点上,当某一行置高电平,且对应的一列置低电平,相应的二极管就亮。在89C52单片机控制下,由锁存器74LS595进行列选,译码器74HC154进行行选。

图4 驱动模块电气原理图
其电路如图5所示。
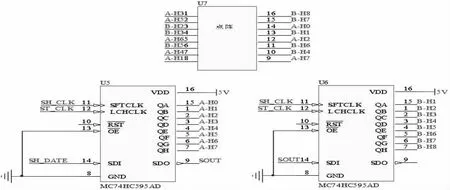
图5 显示模块电气原理图
2.4 语音模块
该模块是以数码语音芯片ISD1760[5-6]为核心的一套智能语音录放系统。设其采样率为8kHz,一共能播放60秒的语音,共分为480个地址,每个地址最小语音长度为125毫秒,因此如果知道单个语音的长度,无编程器时也可推断每个语音所占的地址长度。语音模块原理图如图6所示。

图6 语音模块原理图
3 系统软件设计
该软件设计是在CodeWarrior IDE及Keil C51环境下对系统功能进行开发。首先依据硬件电路对各模块进行编程,并单独测试后,进行整体集调,分析系统程序,并对其进行测试、修正,最终形成稳定成熟的软件系统。系统的软件程序流程如图7所示。
其主控单片机MC9S12检测是否有送餐指令即遥控编码,有送餐指令则进行解码,否则返回继续等待。当解码数不为0时则启动机器人,否则返回继续等待。判断行进过程中是否有可移动障碍,有障碍则停车等待,同时语音提示“请您让路”,否则继续循迹前进。当机器人检测出到达指定的餐桌后,停止2秒后,转动餐盘90°,同时语音提示顾客取走所需饮食,否则继续循迹前进。等待顾客取餐后,保持2秒后餐盘归位,机器人自动判障、循迹、返回原点,否则语音停车提示。

图7 控制系统的软件程序流程图
其辅助51单片机主要负责检测红外编码器是否传来数据,如果传来数据则对其进行解码,并把解出来的餐桌码通过点阵显示。
4 结论
通过不懈的努力,智能餐厅服务系统机器人模型通过了各种测试。从测试效果来看,该机器人能够稳定工作并实现了智能化服务。在2013年陕西省挑战杯比赛中,该作品获得了三等奖,图8为参赛时的样机。

图8 送餐机器人测试样机
随着科技的进步社会的发展,人们生活水平不断提升,智能化服务机器人越来越受到人们的关注。餐厅服务机器人的研发具有广阔的市场和重要的研究意义,符合当今人们对生活智能化的要求。
[1]马浩.未来智能餐厅建设研究[J].科技信息,2012(20):257-258.
[2]李晨,宓超.基于飞思卡尔单片机MC9S12XS128的智能车设计[J].上海海事大学学报,2012,33(1):82-84.
[3]摆玉龙,杨利君,董存辉.基于 MC9S128的电磁导航智能车的设计与实现[J].测控技术,2011,30(11):59-64.
[4]张飞飞,杨雪松,高爱宇.基于STM32的智能灭火机器人设计[J].甘肃科技,2013,29(12):13-15.
[5]王海军,惠彩云,李音,等.一种基于ISD1760的公交车语音报站系统设计[J].价值工程,2013(31):182-183.
[6]邓坚,熊瑞庭,全书海.基于 ISD1760的智能电梯语音报站系统[J].中国水运,2009,9(2):120-121.
猜你喜欢
现代装饰(2022年5期)2022-10-13
现代装饰(2021年4期)2021-11-02
读友·少年文学(清雅版)(2020年8期)2021-01-04
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
阅读(低年级)(2019年8期)2019-10-10
科学导报·学术(2019年44期)2019-09-10
家居廊(2019年1期)2019-09-10
美食(2017年4期)2017-05-04
华人时刊(2017年23期)2017-04-18