基于SRTM数据的地形测量方法研究*
2014-04-26 00:00:46荀建敏苏丽营宫玉鹏赵海春
风能 2014年1期
荀建敏,苏丽营,宫玉鹏,赵海春
(华锐风电科技(集团)股份有限公司,北京 100872)
0 引言
风能是一种没有污染的可再生能源,自20世纪80年代以来,风能利用的主要趋势是发电[1]。风电机组可以通过叶轮吸收风能,再通过发电机进行发电。
风电机组功率特性测试是风电机组型式认证之一,功率特性测试是风电机组准入制度必不可少的一个环节[2-5],但风电机组一般都安装在比较偏远的山区或者草原,不同的地形及气流畸变对风电机组的功率特性测试时测风塔安装处风速的测量有较大的影响,从而与风电机组安装处的风速偏差较大[6-8]。因此,根据国际电工委员会颁布的IEC 61400-12-1标准以及相关研究成果[9-11],其前期工作需要对测试场地进行评估,判定测试场地地形是否满足标准IEC 61400-12-1表1中地形要求,若不满足,则判定是否进行场地标定,及时地完成功率特性测试前期的场地评估工作。
表1中*表示过塔基中心的最佳地形拟合平面斜率;**表示连接塔基中心与地形扇区内单独某点连线最大斜率;L表示风电机组与测风塔的间距;H表示风电机组轮毂高度;D表示风轮直径;d表示 测量位置与被测风电机组的距离;测量扇区外是指风电机组对测风塔测量产生影响的角度范围,测量扇区内则为360°减去该角度。
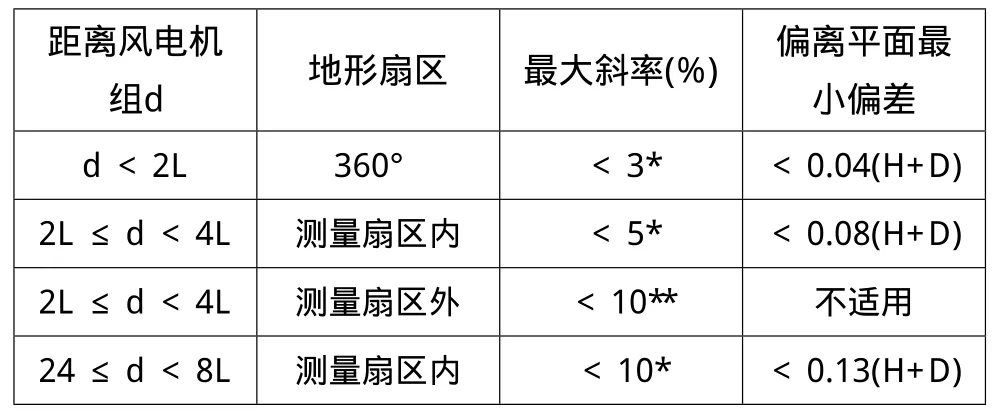
表1 测试场地地形变化要求
对测试场地地形进行评估可以通过人工现场通过GPS采集特殊点地形数据,但是该方法采集的数据点不完全,而且费时费力。本文提供的方法是通过利用美国国防部国家测绘局(NIMA)和航空航天署(National Aeronautics and Space Administration, NASA)在2000年2月共同主持实施的SRTM计划而制成的高精度全球三维地图[12],再结合MATLAB具有强大的数据处理、可视化绘图和解决难题工具箱功能,对数据进行编程绘制与处理[13],拟合出地形的最佳平面,依据标准计算地形评估相关参数,从而判定地形是否满足要求。
1 地形评估原理
功率特性测试时测风塔安装位置标准距离风电机组L=2.5D,但一般以现场风电机组与测风塔实际距离为准。风电机组在测风塔的上风向时,会影响测风塔采集的气象数据,故需要删除该扇区,即不在评估范围内,当L=2.5时,根据以下公式(1)可以计算出α=74°,

如表1中所示,需要评估以风电机组为中心,半径2L、4L、8L范围内的地形数据,主要评估参数为特定扇区过塔基中心的最佳地形拟合平面的斜率与偏离该最佳平面的最小偏差。详细的区域说明如图1所示。
2 地形平面拟合方法
SRTM地形数据提供的是大量的散点数据,利用这些散点数据拟合出最佳地形平面且过塔基中心坐标,本文采用MATLAB 中 的 PCA(Principal Components Analysis)方法。
PCA算法是一种常用的基于变量协方差矩阵对信息进行处理、压缩和抽提的有效方法,其程序计算的步骤为:
(1)去均值;
(2)计算协方差矩阵及其特征值和特征向量;
(3)计算协方差矩阵的特征值大于阈值的个数;
(4)降序排列特征值;
(5)去掉较小的特征值;
(6)去掉较大的特征值;
(7)合并选择的特征值;
(8)选择相应的特征值和特征向量;
(9)计算白化矩阵;
(10)提取主分量。
利用该算法拟合出三维平面模型距离最小的线性回归问题,通过MATLAB中Princomp(X)函数求出拟合平面的法向量,从而得到过塔基最低点的平面方程为:
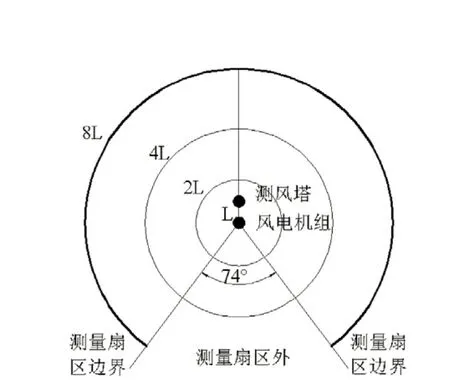
图1 地形评估区域
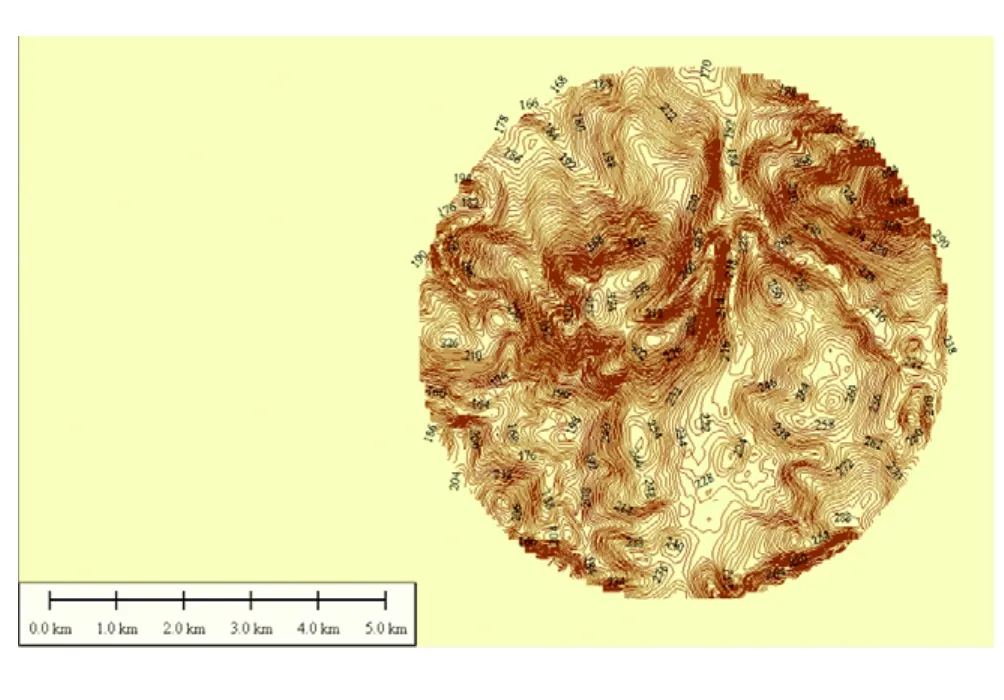
图2 SRTM等高线地形数据
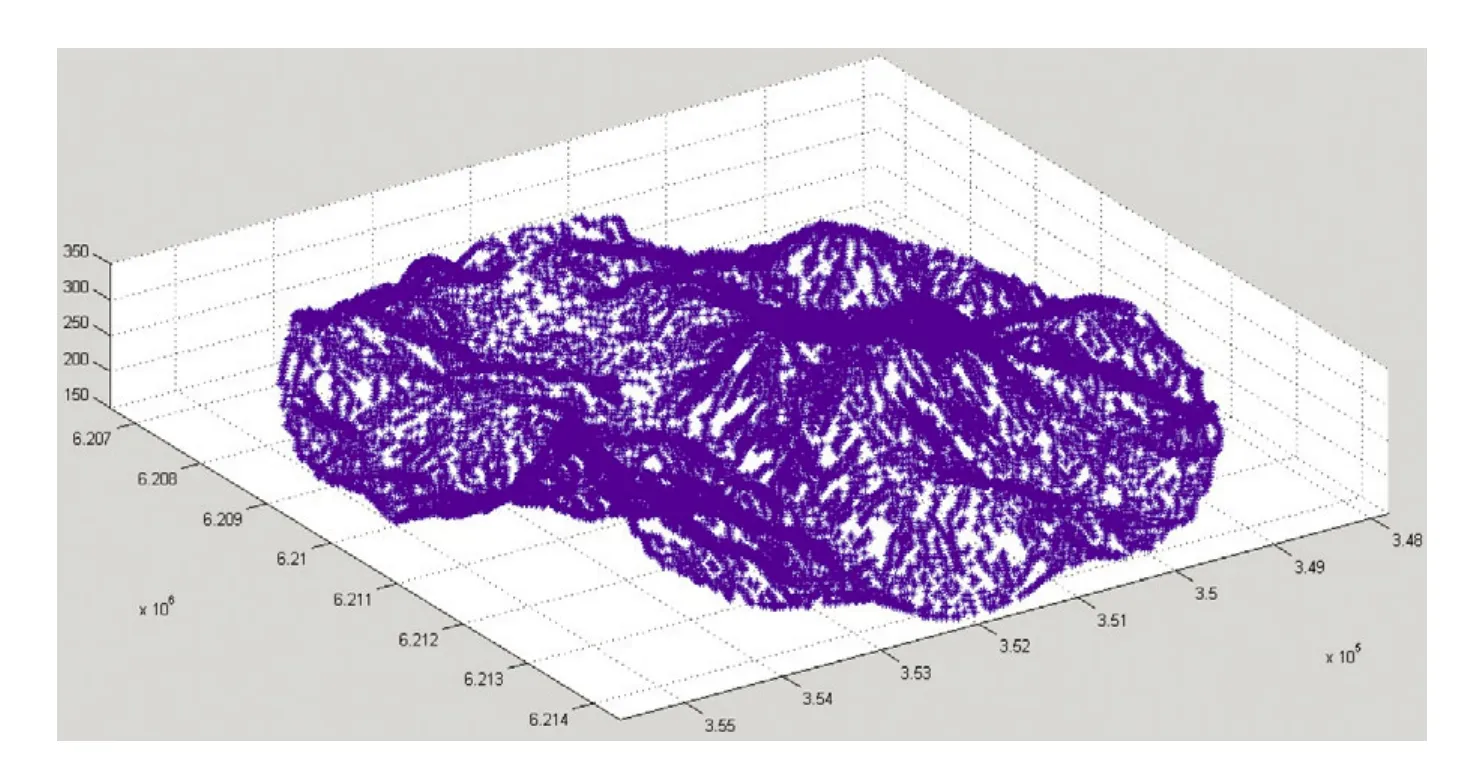
图3 地形数据散点
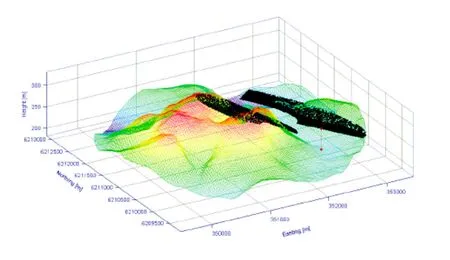
图4 地形平面拟合

其中,[xWTyWTzWT]为风电机组塔基中心坐标,为拟合平面的法向量。
具体执行步骤如下:
(1)风电机组的经纬坐标可以利用GPS现场测量得到,并且拍摄现场的地形照片用于出具地形评估报告;
(2)根据该机位的经纬坐标在网站www.srtm.csi.cgiar.org/selection/inputcoord.asp下载由NASA提供的该机位半径8L内的SRTM地形数据;
(3)在Global Mapper12.0中导入下载的SRTM地形数据并且转化成等高线地形,分别取出以风电机组为中心半径为2L、4L、8L的圆并导出地形数据到Excel中,包括WGS84坐标与海拔高度。
(4)在MATLAB中导入处理的Excel地形散点数据;
(5)调用PCA算法程序,对散点数据进行计算得到最佳拟合平面的法向量,并且绘制出最佳平面及计算出不同区域内的最佳地形拟合平面的斜率与偏离该最佳平面的最小偏差。

表2 测试场地地形计算结果
3 工程实例
以南非某风场8#机组3MW机组为例,塔筒高度H=90m,叶轮直径D=113m,风电机组与测风塔之间的距离L=2.24D=252.8m,风电机组坐标WT为(Easting 351457.0,Northing 6211154.3)。
首先根据风电机组坐标WT在网站www.srtm.csi.cgiar.org/selection/inputcoord.asp下载该机位半径8L内的SRTM地形数据,然后在Global Mapper12.0中导入该SRTM地形数据并且转化成等高线地形,以该机位为中心截取需要分析的2L、4L与8L半径区域内的等高线地形数据,并导出到Excel中,如图2所示。
在MATLAB中分别导入2L、4L与8L区域内的散点地形数据,分别进行计算,如图3所示。
在MATLAB中分别对导入的2L、4L与8L区域内的散点地形数据,使用PCA分析方法进行正交回归拟合,拟合出2L、4L、8L范围内的地形平面,并计算出各个区域内不同扇区过塔基中心的最佳地形拟合平面的斜率与偏离该最佳平面的最小偏差,如图4与表2所示。
表1中的各项计算结果如表2所示。
从表2中计算的结果可以看出,地形不满足IEC标准要求,需要进行场地标定。
4 结论
通过直接引用由NASA提供的SRTM地形数据,基于MATLAB软件利用PCA算法拟合出地形平面,对地形的坡度与高度偏差做出评估,为风电机组的功率特性场地评估提供了有效的方法与数据依据,具有重要参考意义。
[1] 李亚西,武鑫,赵斌,等.世界风力发电现状及发展趋势[J].太阳能,2004(1):1.
[2] 范高锋,裴哲义,辛耀中.风电功率预测的发展现状与展望[J].中国电力,2011,44(6):38-41.
[3] 尹明,葛旭波,王成山,等.我国风电大规模开发相关问题探讨[J].中国电力,2010,43(3):59-62.
[4] 王建东,汪宁渤,何世勇,等.甘肃酒泉风电基地风电预测预报阶段性研究[J].中国电力,2010,43(10):66-69.
[5] 裴哲义,董存,辛耀中.我国风电并网运行最新进展[J].中国电力,2010,43(11):78-82.
[6] 陈庆斌.风力发电机组和风电场的功率特性测试研究[D].重庆:重庆大学,2008:19-21.
[7] 陈树勇,戴慧珠,白晓民,等.尾流效应对风电场输出功率的影响[J].中国电力,1998,31(11):28-31.
[8] 李庆.风电机组和风电场的功率特性及电能质量测试研究[D].北京:中国电力科学研究院,2006:6-10.
[9] GB/T 18451.2-2003 风力发电机组+功率特性试验[S].2003.
[10] IEC 61400 Ed1.0-1998.Wind turbine generator system,part12: wind turbine power performance testing[S].1998.
[11] IEC 61400-12-1-2005,Wind turbines Part 12-1:Power performance measurements of electricity producing wind turbines[S].
[12] 卢辉,刘长星.MATLAB在GPS高程拟合中的应用[J].测绘科学,2009,34(2):191-193.
[13] 左美蓉.SRTM高程数据及其应用研究[D].中南大学,2009:1.
猜你喜欢
无线互联科技(2023年15期)2023-10-26 00:50:54
中小学课堂教学研究(2023年8期)2023-08-26 03:30:42
中华诗词(2023年2期)2023-07-31 02:18:06
数学物理学报(2021年5期)2021-11-19 07:01:12
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:40
电力勘测设计(2018年4期)2018-05-06 23:14:00
长江科学院院报(2018年1期)2018-01-10 11:23:14
现代养生·下半月(2017年8期)2017-12-28 23:45:09
中国科技纵横(2015年9期)2015-12-01 08:48:04
东北电力大学学报(2015年1期)2015-11-13 05:20:25