基于温控方案的一种MEMS惯性测量装置设计
2014-04-26 09:33何海洋王章波
计测技术 2014年3期
何海洋,王章波
(中国空空导弹研究院,河南洛阳471009)
0 引言
MEMS惯性测量装置 (MEMS Inertial Measurement Unit,简称为MIMU)是一种自主式惯性测量装置,具有隐蔽性好,动态范围大,可靠性高,且体积和能耗小、成本低廉等优点[1],这种技术在军事导航及民用领域正起到越来越大的作用。因此,微惯性测量装置的研究成为近年来惯性技术领域重点发展的关键技术之一[2]。然而MEMS惯性仪表在全温范围内的精度不高[3],尤其是长时间工作时,环境温度带来的惯性仪表的零位漂移,它将对MIMU的精度产生直接影响。如何克服温度对MIMU性能的影响,是MIMU实现工程化的重大难题之一。由于MEMS惯性器件参数的温度系数不稳定,输出重复性差,造成系统建模难度大,采取温度补偿消除温度误差的方法不易实现,而用温控的方法使惯性器件工作在恒定的温度条件下,避免其输出受外界温度变化的干扰,却是一种方便可行的方法。
1 设计方案选取
微机械惯性测量装置由三个MEMS陀螺、三个MEMS加速度计、信号采集和处理模块、温度控制模块和结构壳体组成,组成框图如图1,内部结构图如图2。
通过对选用惯性传感器温度特性分析,采用恒温控制方法效果比较好。为了降低系统总功耗,只对陀螺进行恒温控制,对加速度计则采用间接加热与温度补偿相结合的方式,这样,加速度计的温补温度区间较小,补偿效果较好。
由于惯性器件输出为模拟电压信号,而输出要求是脉冲信号,虽然可以直接采用V/F转换电路将惯性器件的输出转换为脉冲输出,但这种方式不易于对惯性器件输出信号进行处理。因此,本方案中考虑先采用高精度A/D转换器对惯性器件的模拟输出进行采样,以实现惯性器件的数字化,便于对其进行误差修正等处理,最后,由处理器控制脉冲信号的产生。
2 温控系统设计方案
2.1 指标要求
温控稳定温度:+55℃;温度控制精度:±0.5℃;温度稳定时间:≤20 min;温控最大电流:≤3.5 A;温控稳态电流:≤1.5 A。以上是温控系统各指标要求。

图1 微机械惯性测量装置原理框图

图2 微机械惯性测量装置结构示意图
2.2 工作原理和组成
温控系统采用分段控制的方案 (如图3所示),与常规方法相比,该方案能够使MIMU的温度在短时间内达到稳定。系统开始上电时进入全速加温阶段 (0~t1),控制对象上的加热片全功率工作,温度快速上升。当温度接近设定的温控点时,温控进入精密温控阶段 (t1~t2,t2≈20 min),此时,根据实时采集的温度信号,通过控制算法,实现精密温度控制。当MIMU的温度达到设定温度点时,系统的加温功率与热耗散功率保持平衡。
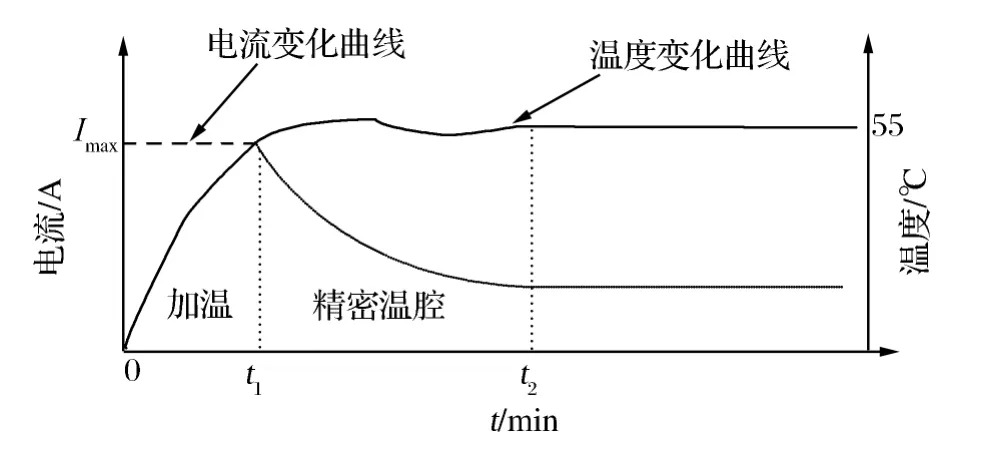
图3 分段温控工作流程图
温度控制模块主要由温度传感器、单片机 (带内部A/D转换器)、场效应管、光耦等器件和加热片组成。温度控制模块组成框图见图4。

图4 温度控制系统组成框图
2.2 温控电路设计
温控系统通过PWM控制加热电流占空比来调节加热体的加热速度,即控制场效应管的导通与截止,从而实现对加热体电流的通断控制,PWM脉冲由单片机计算并输出。并在单片机与场效应管之间采用光电隔离,以提高系统的可靠性。温度控制电路如图5。另外,为了防止在软件失控后系统加热失控导致器件烧毁,在温控电路中增加一个温度开关,当腔体温度达到限制温度后自动断开加热电流,超温保护电路如图6。

图5 温度控制电路

图6 超温保护电路
2.3 温控算法设计
温控系统采用增量式PID控制算法,基本原理为,通过A/D信号采集模块对惯性器件温度信号实时采集,并计算出惯性器件当前温度与目标温度之差,再用PID控制算法计算出相应的控制量,然后以PWM脉冲形式向控制机构输出控制量,即相应占空比的PWM脉冲,进而控制加热器的平均加热电流,从而实现温度自动控制。图7为PID控制系统方块图。

图7 PID控制系统方块图
温度控制系统主程序流程图如图8所示。开机复位时,系统进行初始化,接着检测温度,然后根据检测到的环境温度选择合适的PID参数,再根据反馈温度由PID增量式算法计算出控制量。本系统控制周期为1 s,即每隔1 s检测一次温度,输出一次控制量,对加热体加热电流调整一次。

图8 温控系统主程序流程图
增量式PID控制算法如式 (1):

式中:Kp为比例系数;Ki,fe为积分系数;Kd为微分系数;e为当前偏差;e(k-2),e(k-1),e(k)分别为最近三次温度采样值与目标温度的偏差。
PID计算流程图如图9所示。

图9 PID计算流程图
3 试验验证
为了验证采取温控措施后对MIMU性能提高的实际效果,分别在温控系统不工作和工作的条件下,分别对MIMU进行了静态测试。测试状态为:MIMU自然放置在室温条件下,采样时间间隔为1 s,得到部分测试结果如图10所示;在采取温控措施后对MIMU进行测试的结果如图11所示。
由图10、图11可看出,MEMS惯性测量装置温控后在较短时间即可达到输出稳定。
为了进一步评判温控MIMU的性能,在带温箱的三轴测试标定台中对其进行了低温 (-40℃)、常温(20℃)、高温 (+65℃)三个温度点的六位置性能测试,角速度通道和加速度通道测试结果分别见表1和表2。

图10 无温控时加速度计和陀螺输出曲线

图11 有温控时加速度计和陀螺输出曲线
根据测试结果统计,无温控措施、全温条件下MEMS惯性测量装置角速度通道零位漂移在-2000(°)/h~+2000(°)/h范围内波动,非线性在-180'~+180'范围内波动,且两项指标重复性较差;加速度通道零位漂移在-0.1 g~+0.1 g范围内波动,非线性在-1%~+1%范围内波动,且两项指标重复性较差。与表1、表2中数据对比可知,在温控条件下角速度通道性能和加速度通道性能的测试指标精度远远优于无温控措施的结果,指标重复性也较强。
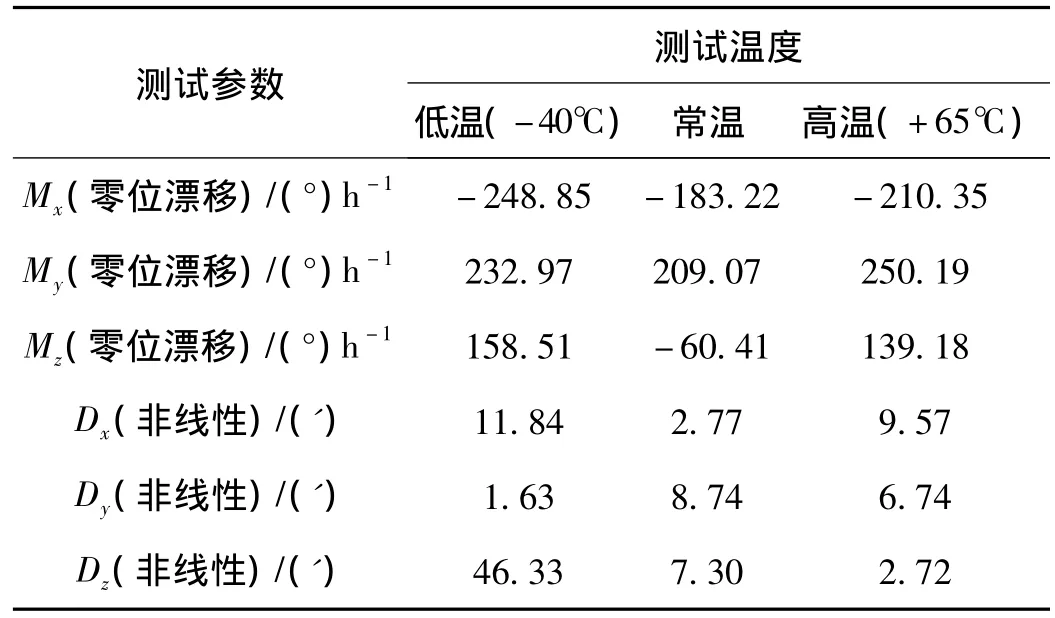
表1 角速度通道性能测试结果 (温控下)

表2 加速度通道性能测试结果(温控下)
4 结论
采取了分段温控的方案,通过PWM温控电路和增量式PID控制算法实现了对MEMS惯性测量装置的实时温控,确保惯导系统恒温工作在精度较高的高温+55℃温度点,通过试验验证,结果表明温控后MEMS惯性测量装置在较短时间内达到了输出稳定,高低温下指标精度受外界温度影响较小,精度相比无温控措施下提高了0.5~1个数量级,效果明显。
[1]马春艳,王国锋.MEMS组合惯导系统研究 [C]//全国第十二届空间及运动体控制技术学术年会论文.桂林:2006:185-189.
[2]蒋庆仙.关于MEMS惯性传感器发展及在组合导航中的应用前景 [J].测绘通报,2006(9):5-8.
[3] Geiger W,Bartholomeryczik J,Breng U,et cl.MEMS IMU for AHRS Applications[C] //Position,Location and Navigation Symposium.IEEE/ION,2008,5:225-231.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
原子与分子物理学报(2020年5期)2020-03-17
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年15期)2017-01-15
电子制作(2016年21期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01