基于多基线干涉仪和多波束比幅联合测向天线系统的设计与实现
2014-04-26 06:09:26李东海
舰船电子对抗 2014年2期
李东海,柯 凯
(解放军91404部队,秦皇岛 066001)
0 引 言
目前,船用雷达侦察装备可以选择的测向体制主要有搜索式测向、多波束比幅、相位干涉仪、数字相控阵、时差法等。
多波束比幅测向法技术成熟,难度小,瞬时带宽宽,截获概率高,不依赖于测频,成本较低;但是其测向精度对天线的幅度方向图特性和通道之间的幅度平衡特性依赖性较大,测向精度很难做得很高,就8~18GHz频段八比幅测向而言,难以满足1.5°(rms)的测向精度要求[1-2]。
相位干涉仪测向法相对容易达到较高的测向精度,但是它对通道之间的相位一致性要求较高,而且与测频精度有关。最主要的问题是干涉仪测向还存在相位模糊问题,为了消除相位模糊和兼顾测向精度,需要采用多重测量或其他处理方法。本文提出一种3基线干涉仪测向保精度、八比幅测向解模糊的方法,仅供参考[3]。
1 干涉仪测向原理
干涉仪测向的原理示意图见图1。
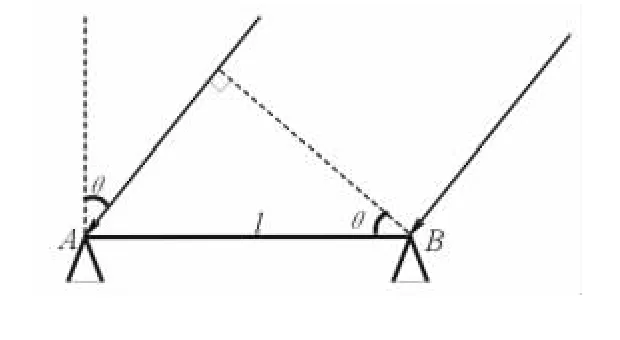
图1 干涉仪测向原理示意图
由图1可知:

式中:φ为两天线接收同一信号的相位差;λ为辐射源的信号波长;θ为信号的到达角(相对于基线的法线夹角);l为两天线之间的基线长度。
由式(1)知:由于基线长度l是已知的,只要测得信号的相位差φ和信号波长λ即可得到信号到达角。
2 干涉仪测向误差分析
对式(1)进行微分可以得到测向误差估算公式:

式中:Δθ为角度测量误差;Δφ为相位测量误差;Δλ为载频测量误差;Δl为基线长度误差。
首先仅考虑测频误差引起的测向误差,即:

假设测角范围限制在 ±π/3范围内,设θ=π/3,f=8 000MHz,Δf=15MHz,计算得 Δθ=0.18°,影响较小,可以忽略不计。由于基线长度可以靠结构安装保证,由基线长度误差引起的测向误差也可以忽略。重点考虑相位误差的影响,这在干涉仪测向中是主要的误差来源。忽略式(2)后两项得:

因为是相位测量,所以对于单基线干涉仪测向,无模糊的相位检测范围为 [-π,+π],设其对应的最大无模糊测角范围为[-θmax,+θmax],根据式(1)可获得最大相位差为π时的信号到达角θmax为:

综上可以看出:
(1)测向误差来源于相位测量误差、频率测量误差和基线长度误差,其中频率测量误差和基线长度误差较小,可以忽略。
(2)测向误差大小与θ有关,与cosθ成反比。在θ=0°时(视轴方向)误差最小,在θ=90°时(基线方向)误差非常大,已无法进行正常的测向。因此,通常将单基线的测角范围限制在±π/3,甚至更窄。
(3)测向误差大小与l有关,l越大,测向误差越小。
(4)干涉仪测向存在这样的矛盾:要获得高的测向精度,应尽可能地提高λ/l,但是此时能够获得的无模糊测角范围就越小。
为了解决这个矛盾,以长基线保证高的测向精度,以采用更多的基线或其他方法获得无模糊角,解决长基线的模糊问题。
下面列表分析一下8~18GHz频段的测向精度,假设测角范围限制在±45°,考虑最差情况:λmax=37.5mm(f=8GHz)、θ=45°,由式(4)可以计算得到几种情况下的测向误差,见表1。

表1__干涉仪测向误差估算表
由表1可以看出:选取干涉仪的最长基线大于3.56λmax,在8~18GHz频段内的测向精度能够达到1.5°(rms)指标要求,考虑其它误差因素,最长基线长度取8λmax(300mm)。
3 解模糊对比幅测向的精度要求
从上面的测向误差分析可以知道:为了使干涉仪测向精度提高一点,可以将2个天线的间距取大一点,但是这样一来,有可能由此带来系统相位模糊问题。为了解除相位模糊问题,可以采用多条基线或比幅测向等其它方法获得无模糊角。
本系统的解模糊方案采用八比幅测向值解除最短基线(虚基线d23-d12)的相位模糊,再依次用短基线解除长基线的相位模糊。比幅解相位模糊的方法可以理解为:假设存在一无模糊的基线(λ/2),比幅测向的测量结果可以等效为这一基线的测量结果。能否解模糊,取决于两基线的相位误差,对相位误差的要求为:

式中:Δφs为较短基线的相位误差;Δφl为较长基线的相位误差;n为基线长度比。
将比幅测向误差转换相位误差,由式(4),当l=λ/2时,可得:

结合式(6),认为短基线和长基线的相位误差一致,由此可得到解模糊对比幅测向误差的要求:

对于比幅解相位模糊:

代入式(8)有:

式中:ΔθA为比幅测向误差。
根据式(10)可知,用比幅结果解基线的相位模糊对比幅测向精度的要求与θ、λ/l、Δφ有关:
(1)θ越小,要求的 Δθ越小,最小值在θ=0°。
(2)Δφ越大,要求的Δθ越小,且成线性关系。
(3)λ/l越小,要求的Δθ越小。因为是整项的线性系数,其影响也最大。
当θ=0°时,重新整理式(10),可得到最苛刻的比幅测向误差(忽略不同θ的相位误差的差异):

对于8~18GHz频段而言,λmin=3×108/18GHz=16.7mm,由式(11)可以计算得到各种条件下,利用比幅测向值解除相位模糊对比幅测向的精度要求,列出几种典型情况见表2。

表2 比幅解相位模糊对比幅测向的精度要求(θ=0°,λmin=16.7mm)
由上表可以看出:解除本方案选取的最短基线(虚基线,长度为λmin,约16.7mm)的相位模糊要求比幅测向的最大误差小于23°,目前八比幅测向的最大误差ΔθA基本在15°~18°,因此,八比幅测向精度完全可以满足解除最短基线相位模糊的要求。
4 分析结论
由前面测向误差分析可知,单基线的覆盖视角不可能太大,将其限定在±45°(相对于视轴方向)范围内。因为船用平台的安装条件所限,天线阵是分成左、右舷布置的,干涉仪测向系统采用4个天线线阵,左、右舷各包括2条线阵,每个天线阵由4个天线构成,每个天线阵覆盖±45°视角范围,考虑到比幅测向的误差,每个天线阵实际覆盖区间需要在±60°视角范围,采用3根基线测向。
根据干涉仪天线阵的布置,可以将4个线阵天线的覆盖范围区间划分,覆盖方位划分与所含天线见表3。
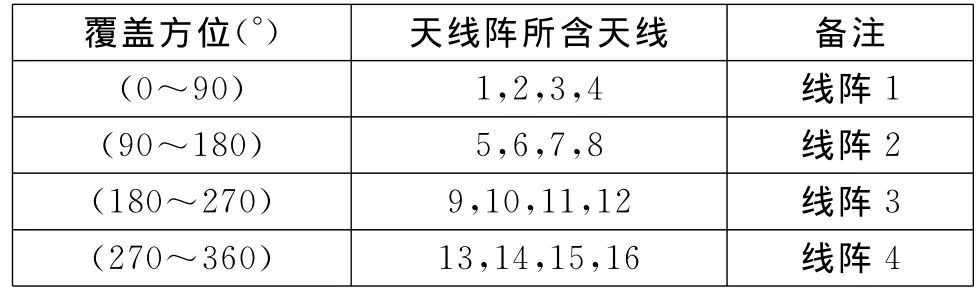
表3_干涉仪天线阵覆盖范围区间划分
根据八比幅测向试验结果,对照表3,选择相应的4个天线构成的干涉仪测向线阵作为干涉仪基线通道,用比幅测向值解最短基线(虚基线d23-d12)相位模糊,再依次用相应的短基线解除长基线的相位模糊,而用最长基线的角度测量值作为最终的测向结果,以此保证测向精度。
对于8~18GHz频段,本方案选用的比幅加线阵干涉仪测向体制在比幅测向最大误差23°、相位测量误差≤30°时,可以同时满足比幅解模糊和测向精度指标1.5°(rms)的要求。
5 方案实现
对于8~18GHz频段,本系统采用比幅加线阵干涉仪的测向体制。比幅测向采用八比幅测向体制,用于宽带宽开瞬时比幅测向,同时比幅测向值还用于解除干涉仪测向最短基线(虚基线d23-d12)的相位模糊,而依靠干涉仪测向来保证测向精度。
干涉仪测向系统在频域和方位上均为宽开系统,保证了对信号的瞬时全概率截获。8~18GHz频段测向天线阵的布置示意图见图2。

图2 8~18GHz测向天线阵布置示意图
干涉仪测向系统的天线阵布置成4条线阵,360°全方位覆盖,每条线阵分别覆盖90°,每条线阵上的4个天线分别构成几条长短不一样的干涉仪基线,由最长基线d14保证测向精度,依靠虚基线(d23-d12)解除短基线d12的相位模糊,再用基线d12解除基线d23的相位模糊,最终用基线d23解除最长基线d14的相位模糊,而虚基线的相位模糊则依靠比幅测向结果来解除。
短基线尽量短,以降低解除短基线相位模糊对比幅测向的精度要求;在短基线能够解除长基线相位模糊的前提下长基线可尽量长,以提高测向精度。本方案选择基线长度为d12=2λmax,d23=3λmax,d14=8λmax。
由干涉仪测向天线阵的每条线阵中抽出1个天线,另外再增加4个天线共同构成8~18GHz频段的比幅测向天线阵,每个天线覆盖45°,共同覆盖水平360°。比幅天线阵由17,4,18,8,19,12,20,16号8个天线构成。
6 结束语
本文从干涉仪测向原理出发,结合干涉仪测向公式进行了测向误差分析,根据测向精度要求,提出了三基线及最长基线设计要求;根据相位解模糊要求,提出了八比幅测向精度要求。本方案实现之后的最终测向精度结果还有待于后续外场试验验证。
[1] 赵勇慧.提高相位干涉仪测向精度与改善测角范围的探讨[J].火控雷达技术,2002,31(2):34-37.
[2] 李建军.多基线干涉仪测向的基线设计[J].电子对抗,2005,31(3):8-11.
[3] 吴宝东,陈舒.基于相位干涉仪测向系统的相位误差分析[J].舰船电子对抗,2008,31(3):74-76.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
科技研究·理论版(2021年20期)2021-04-20 01:13:14
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
制导与引信(2017年3期)2017-11-02 05:16:58
测绘科学与工程(2016年6期)2016-04-17 06:51:25
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04