雷达海杂波的频域处理
2014-04-26 06:09:20关堂新
舰船电子对抗 2014年2期
关堂新
(海军驻合肥地区军事代表室,合肥 230088)
1 杂波特性分析
海杂波处理的难点在于其信号变化快,具有很大的随机性,处理起来难度较大。首先,海杂波与海域相关,有些海域杂波小,而另一海域杂波明显强;其次,海杂波与气象相关。同一个地方,不同的季节,甚至是同一天的不同时间,海杂波也不相同。人们对海杂波进行了大量的研究与测量,得出如下结论,对海杂波影响最大的因素是风。对于海杂波影响的另一个因素是频率,频率较低的雷达,如米波雷达,由于其波长长,海表面近似为平面,后向杂波效应不明显,杂波强度弱;对于频率较高的微波雷达,由于波长短,海杂波的影响是不能忽视的[1]。
根据文献[2],海杂波与频率、风力、风速、分辨单元、极化方式、入射余角、温度等均有关系。在以上诸因素中,频率的影响最大,如米波雷达的杂波强度很小,微波雷达的杂波影响很大。除去频率以外,最主要的影响因素是风。
从时域上看,海杂波呈现各种各样的分布,其表现为与距离分辨单元的尺寸有关,对于大的距离分辨单元,海杂波在距离上是分布式的;随着距离分辨单元的减小,海杂波表现得越来越孤立,类似于目标时变的一系列回波。特别是在小入射角时,海杂波表现为海浪尖峰。根据《雷达手册》的描述,海杂波在小入射角时,水平极化X波段表现情况如图1所示。
对于地面雷达而言,均为小入射角情况。风速越大,尖峰数量越多,出现的海尖峰数量与风速的次幂成正比;风速越大,海尖峰的幅度越大。在微波段,中等风与弱风条件下,两者幅度相差约40dB。从图1可以看出,杂波呈现一定的随机性,在时域上很难处理。虽然相关文献将杂波分成各种各样的分布进行处理,但效果并不好。我们可以从杂波的成因上考虑问题。杂波的主要影响因素是风。风的特性主要有风速、风向等。风速、风向等的主要影响是杂波的频谱。因此,对海杂波的处理可以考虑采用频域处理的方式。

图1 X波段杂波尖峰示意图
2 风对海杂波频域特性的影响
2.1 海杂波中心速度估算
海杂波固有中心速度:

海杂波受风力的影响而改变,在风力的作用下,海面上各个散射体之间发生相对运动,使接收到的海杂波功率谱存在多普勒频移。
根据文献[2]中的模型,海杂波的频域特性与风速关系分析如下(假定雷达工作于S波段):
按雷达在四级海情工作的要求进行分析。四级海情工作时,风速为8.2m/s,浪高0.4m。海杂波
式中:Vw为风束;αw为风速与波束指向夹角。
式(1)说明在风速方向海杂波存在一个平均速度。
海杂波中心合成速度(包括海杂波固有速度和平台运动速度):


式中:αp为平台与波束方向夹角;Vp为平台运动速度,取15m/s时,当风速与平台运行速度一致时,杂波速度最大。
式(2)、(3)说明:由于风力及平台运动效应,海杂波的中心速度发生了一定的变化(对于地面雷达,可不考虑平台影响),如图2所示。

图2 中心风速随天线扫描变化图
对应的海杂波中心频率为-300~300Hz(S波段)。
2.2 海杂波速度谱宽估算
海杂波固有宽度为(由于海浪运动造成):

天线扫描展宽为:

式中:θa为半波束宽度;ωs为扫描速度;λ为波长。
跨波束展宽(由于平台运动和海浪运动带来):

杂波总展宽为:

假定天线转速为10r/min,得到如图3所示杂波速度宽度。

图3 杂波宽度随天线扫描变化图
对应的杂波频谱宽度为:

除去以上影响杂波中心频率因素以外,还有如下影响雷达频谱的因素[3]:海况级数较低时,谱是高斯型的,平静海面的谱形状则接近双指数下降型;风速增大,白浪增多时,谱宽增加且不对称,顶风和顺风比侧风的谱宽。
由于雷达杂波的谱中心和谱宽是变化的,这种影响也不容忽视。因此,为了更好地进行海杂波下目标检测,应采取自适应方法。在处理时,可以自适应地计算出杂波谱中心和杂波谱宽,并对杂波中心进行频谱搬移,将频谱搬至零通道处,通过自适应频域滤波器将杂波消除。
3 海杂波模型及杂波处理对策
现代雷达中最为常用的是一维阵列雷达,其回波信号形式如图4所示。
图中假定目标的仰角为θi,则某一时刻回波模型为(对于各个孤立的分辨单元而言,杂波回波亦可适用):

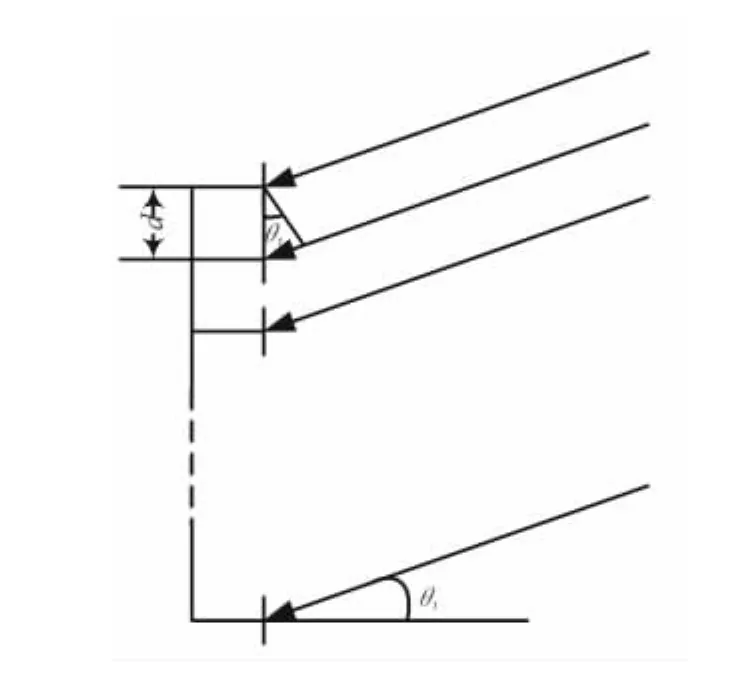
图4 目标回波示意图
式中:ω0为信号载波频率;d为阵元间距;θi为目标仰角;ωd为雷达载波频率;Ti为脉冲重复间隔。
如果考虑到目标回波将会在多个脉冲重复间隔中出现,并考虑雷达回波的多个快拍,则雷达信号包含空间、时间、频率3个域的综合信息。因此,1个CPI的目标回波信号(含M个脉冲,第i个脉冲含L个距离单元)可写成如下形式[4]:

式中:STi为多普勒信号(慢时间信号);ωd为多普勒频率;St为时域信号(快时间信号);ω0为载频;Ssp为空间信号;ωi为空间频率;⊗为克罗奈克积。
其中空域信号可以表示为:

通过空域信号调整,使波束向上抬升,可以减少海杂波强度,但这种方法是以牺牲小目标的检测为代价的。为了更好地进行目标检测,应从频域处理出发。频域信号(慢时间信号)具有更为精细的多谱勒处理能力。频域信号如下所示:

式中:ts为采样间隔。
该式中往往包含复杂的信号形式,如脉冲压缩、脉冲编码等。对于海杂波而言,回波是一个面目标,因此,人们一般试图将分辨单元减少,实现减少海杂波影响。
杂波及干扰在3个域内与目标完全相关的机率极小,因此,可以综合以上3个域的处理,将目标检测出来。利用阵列信息的处理方式称为空域处理;利用Ti的处理方式为频域处理(也称慢时间处理,机载雷达往往利用空时两维处理);利用t信息进行的处理为时域处理(含脉压、恒虚警率(CFAR)等)。最有效的是频域处理,在频域上,采用自适应动目标检测(MTD)或自适应脉冲多普勒(PD)的办法将杂波加以消除,将目标快速检测出来。对于慢速或静止目标可以利用时域信息——杂波的相关时间小于目标的相关时间,进行长时间积累,达到目标检测的能力。
4 频域去杂波算法
虽然杂波的变化看似无规律,但其频谱宽度及频率中心的变化还是需要时间的。可以认为,在极短的时间内(一个CPI)其频率特征不变或缓变。这里说的频率特征是杂波的频谱形式、杂波的中心频率和谱宽等。自适应杂波滤除即基于这个前提。
以地面雷达为例,频域杂波滤除流程为:
(1)在常规雷达滤波器上并联上一个自适应处理通道,对杂波特征进行估计;
(2)通过对雷达杂波进行频谱估计,计算出杂波的频率中心和谱宽等参数;
(3)根据得到的频率中心和谱宽自动调整滤波器参数,使其频谱响应零点对准杂波中心,并将零深宽度调整到与杂波谱宽一致的水平,对雷达回波进行滤波。
自适应滤波器的结构如图5所示。

图5 频域去杂波性能分析方法
根据上述方法进行仿真分析,杂波频谱中心假定为0m/s(频率中心并不一定是零速,这里设为0,便于简化处理),杂波谱宽假定是1.5m/s,雷达工作波长0.1m,滤波器采用MTD滤波方式,雷达脉冲重复频率为1 000Hz,对于频道为-125Hz的滤波器,响应如图6(对于±45Hz、0以外的滤波器响应类似,±45Hz、0Hz以内的滤波器不置零点)。

图6 频域处理方法仿真结果
上述处理方法中的副瓣并不高,但零深很深,可以将杂波消除干净,因此具有很强的工程实用性。
杂波处理对于岸对海及舰载雷达而言,具备至关重要的作用。杂波虽在时域上表现为随机性,但在频域上的特征是可把握的,因此,可以通过滤波的方式将杂波滤除。对处于0通道(或杂波中心)处的目标,频域处理方法的检测性能将会下降。
自适应杂波滤除的方法应结合雷达的参数设计,减少杂波的影响:(1)尽量提高雷达工作频率,提高工作频率不仅可以降低杂波带宽,而且可以减少杂波反射率,进一步减少杂波影响;(2)尽可能提高雷达的重复频率,重频越高杂波所占带宽越小,杂波干净区域大,但高重频会带来距离模糊,需要采取解模糊措施,因此,重频的设计应根据任务需求进行优化设计。以上两方面的优化设计可保证自适应杂波滤除算法优势得到最为充分的发挥。
5 结束语
自适应频域杂波滤除,对于速度较快的目标的检测性能较好。对于慢速及静止目标而言,其频谱与杂波相似,很难在频域上分开。可以利用慢速与静止目标的相关时间长的特点,考虑采用长时间积累的办法将目标的信杂比提高,以达到检测目标的目的。
[1] Skolnik Merril I.雷达手册[M].南京电子研究所译.第3版.北京:电子工业出版社,2010.
[2] Barton David K.Radar System Analysis and Modelling[M].Norwood:Artech House Inc,2005.
[3] 朗 M W(美).陆地和海面的雷达波散射特性[M].薛德镛译.北京:科学出版社,1981.
[4] Richards Mark A.雷达信号处理基础[M].邢孟道,王彤,李真芳,等译.北京:电子工业出版社,2008.
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
空间科学学报(2021年6期)2021-03-09 06:20:14
测控技术(2018年7期)2018-12-09 08:58:22
雷达学报(2018年3期)2018-07-18 02:41:34
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
无线电通信技术(2015年3期)2015-12-23 11:37:00
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
电测与仪表(2015年3期)2015-04-09 11:37:24