
应用西门子MCP 用户自定义键接口控制迷你手持单元
2014-04-25 05:15孙永超李金龙
制造技术与机床 2014年2期
孙永超 李金龙
(齐重数控装备股份有限公司,黑龙江 齐齐哈尔161005)
1 方案实施
在使用迷你手持单元时,需要分别对使能、轴选、增量、正、负、快速信号及手轮信号进行控制。通常情况下,需要将手轮信号引至数控系统上的对应插座,将其余控制信号线引到PP72/48 上。当手持单元安装在按钮站旁边,距离数控系统很近时,可将控制信号连接到840D sl 和828D 用的机床控制面板MCP310C 和MCP483C 上带有连接用户自定义按钮的I/O 接口X51 ~X55(图1),无需再将线引到PP72/48 上。
2 初始硬件配置
①西门子SINUMERIK 840D sl 或SINUMERIK 828D 数控系统;②MCP483C PN 或MCP310C PN;③手持单元部分:6FX2007 - 1AD03,6FX2006 - 1BG03,6FX2006 -1BG70;④手持单元到电柜的多芯连接电缆;⑤16 点输入模块。
3 改后硬件配置
①西门子SINUMERIK 840D sl 或SINUMERIK 828D 数控系统;②MCP483C PN 或MCP310C PN;③手持单元部分:6FX2007 - 1AD03,6FX2006 - 1BG11,6FX2006 -1BG70。

图1 X51 ~X55 接口的位置示意图
更改配置前后接线对比如图2 所示。
4 使用及注意事项
在MCP 机床控制面板上,用户自定义输入输出接口可供机床设计人员使用。其中,输入点接口(图3):X51,X52 和X55;输出点接口(图4):X53 和X54;这样,在PLC 程序控制时,可使用系统内部分配的地址进行控制,而不占用外部的PC 地址。

图2 更改配置前后结构连接对比示意图

图3 输入点X51、X52、X55 的电路原理图
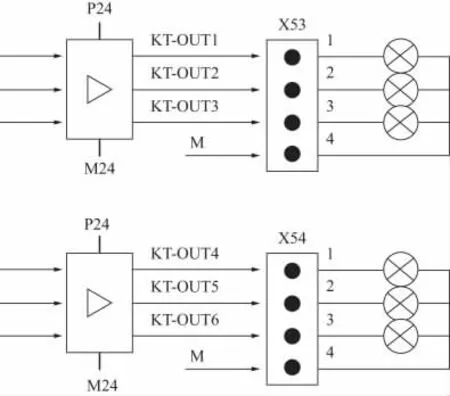
图4 输出点X53、X54 的电路原理图
在使用X51 ~X55 接口进行控制时,需要注意以下几点:
(1)在进行数控系统订货时,需要订购专用的4芯排线,订货号是6FC5247 -0AA35 -0AA0。
(2)X51 ~X55 的4 脚插头提供的公共地为M—0 V,此脚与MCP 的24 V 电源的地—0 V 是通过内部接通的。在使用输出点时,以MCP483 的X53 的1 脚为例(图5),指示灯一端接到1 脚上,另一端接到4 脚上,PC 输出端Q119.0 有输出的情况下会在1 脚和4脚之间产生直流24 V 的电压。由于输出点的最大输出电流是0.3 A,即最大可以带7.2 W 的负载,因此推荐使用1.2 W 的指示灯。
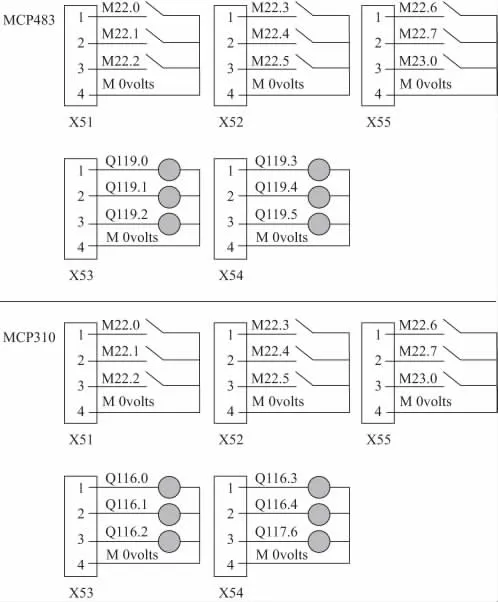
图5 PLC 接口地址
(3)需要特别注意的是在使用输入点,以MCP483的X51 的1 脚为例(图5),按钮的公共端连接1 脚,另一端连接到4 脚,当按钮按下时4 脚的公共地即M0 V引入1 脚,此时将在I122.0 位产生高电平1 的信号。切记一定不要将外部24 V 电源P24 V 引入X51、X52和X55 的1 脚到3 脚,否则会造成输入点的烧坏!
5 项目推广及应用前景
使用MCP 用户自定义键接口X51 ~X55 地址,可方便机床制造人员的硬件连接,减少故障点,节约成本约两千元。该方案已经在产品设计时使用,并在用户处得到验证,可在机床设计应用中广泛推广。
猜你喜欢
科学咨询(2020年53期)2020-03-19
制造技术与机床(2019年12期)2020-01-06
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
能源(2017年7期)2018-01-19
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年9期)2017-11-27
科学家(2015年12期)2016-01-20
