
Semantic Social Service Organization Mechanism in Cyber Physical System
2014-04-24 10:53:52ZhangBo张波PanXiaosheng潘晓声PanJianguo潘建国
Zhang Bo(张波),Pan Xiaosheng(潘晓声),Pan Jianguo(潘建国)
College of Information,Mechanical and Electrical Engineering,Shanghai Normal University,Shanghai,200234,P.R.China
1 Introduction
Cyber physical system(CPS)is a kind of mobile sensor network system which combines the virtual computational world and physical world into united system in order to provide more powerful service capacities and qualities to human beings[1].As a kind of environment-sensitive and dynamically organized system,CPS should be not only adaptive to physical and cyber environments,but with self-organizing capacity according to application needs[2].Therefore,a unique challenge of CPS is how to organize services best matched the collaborative applications from the nodes in the CPS′s mobile sensor network.
One important difference between CPS network and the existing internet technology is that the communication transmitted via CPS network is usually the measurement on the physical world and therefore subject to certain constraints due to physical environments[3].Many examples of CPS,such as intelligent traffic control,smart buildings,and sensor devices,show that the performance of CPS is closely bound up with the organizing of the node devices which provide various services for the whole system.
Existing researches in CPS mainly focused on architecture[4],middleware designing[5],system control[6],system security[7],QoS[8]or real-time data management[9].However,as service provider,it is critical to organize a competent service group for CPS autonomously,which receives limited attention in study.Efforts on node organizing are usually based on criteria of cost minimization or utility maximization[10,11].In our view,such an environment sensitive self-organizing mechanism of CPS should be based on cognizable service capacity,qualified service measurement,and self-communication between sensor nodes of CPS.
In addition,there is another significant feature,social relation,which is easy to be ignored.Social online service,such as social networks and microblog,is popular applications for users[2,12,13].In real world,people also tend to cooperate with familiar persons because of the creditable relationship.Likewise,social relations,such as relationships or communities,are also important for nodes cooperation organizing in CPS.We can organize nodes in CPS through their past relationships and evaluate whether they can complete the task collaboratively or not.
We address an environment aware service self-organizing mechanism for CPS.Our main contributions here are:(1)Formal semantic descriptions for CPS node,physical environment,task and social relation are presented so that CPS can be understandable and communicatable based on the formal semantics;(2)The reasoning rule of service organizing for CPS are represented based on Horn clause;(3)Self-organization algorithms of CPS service,including environment aware measurement and service capacity evaluation selection,are proposed based on semantic decomposition,and organizing matrix are defined for CPS.Finally,we propose the service self-organizing mechanism for CPS based on aforementioned method.
2 Semantic Descriptions of CPS
Formal semantic description should be employed to enable nodes of CPS to recognize the meanings of both physical and cyber aspects and make self-communication between nodes possible.In our views,formal semantic for CPS service organizing must be defined from the following aspects:capacity of node,physical environment,requirement of task and social relationship.
In the section,we define the formal semantic descriptions for our mechanism:CPS node,physical environment,and application task.
2.1 Capacity of node
CPS node is a service provider through its physical device and cyber software.Thus,we describe capacity of CPS node in terms of physical and cyber features.
Semantic of physical capacity can be defined as follows:
Definition 1 Physical capacity semantic can be described as Ps=(id,I|O,ℑ-real,ℑ-mobile,p-value.Here,iddenotes the identity code of device in CPS,I|Othe input port parameters and output port parameters of devices,ℑ-real the real-time environment around the node,ℑ-mobile a set of environment as(ℑM1,ℑM2,…),which denotes the potential environments that device can move,p-value the physical capacity performance value of node.
In definition 1,physical capacity performance value is evaluated from three aspects:fault tolerance,adaptability and stability.
Let a node diwhich has totally success rate of work in the past be suc(di),and the fault rate in the past be fault(di).At the same time,let the rate of node′s recovering from the faults be recover(di).The node′s capacity of fault tolerance can be calculated as

In Eq.(1),we can see that the lower value of fault(di)is,the higher value of capacity of fault tolerance cp_t(di)is.
Suppose there are a node diwith an environment list E=(e1,e2,…)which indicates the detail environments diworking around and ratio(ek)which denotes the successful ratios of each environment ek(Σratio(ek)=1).Assume that diworks n times in environment list E= (e1,e2,…)in the past.Then,for a task environment list E-task=(w1,w2,w3,…)physical capacity value of adaptability of dican be calculated as

In Eq.(2),function match(ek,E_task)is a match expression and it indicates that there be an environment wl∈E_task which satisfies the condition(∃ek∈E)→(ek=wl).Function|E-task|indicates the total number of list E-task.β∈[0,1]is a regulation parameter for calculation and is an empirical value which is given in advance based on the experiences of examinations.We can see that the higher value of in Eq.(2)implies the value of cp_a(di)will be higher.
Let node dihas stability performances as follows:|Timeexist(di)|denotes the total length of diexisting time and|Timestable(di)|indicates the total stable working time length of di.Assume that node difailures n times from CPS in the past.Then,physical capacity value of stability can be calculated as

whereβ∈[0,1]is the parameter which is given the same as in Eq.(2).
Therefore,physical capacity value can be calculated as

Semantic of physical device describes the physical information about nodes in CPS,including interface,mobility and capacity measurement,so that nodes in CPS can recognize each other and communicate autonomously.All elements of Ps are some of the parts which influence the service quality in physical degree directly.
Semantic of cyber capacity of service aims to provide the all software descriptions of the CPS nodes.CPS depends on cyber components to provide the service solutions to meet user′s needs.In order to achieve the self-organizing requirement,CPS should know the cyber capacities of nodes and integrate them into a whole for solving complex tasks.Thus,we need to make the cyber components apprehensible and readable for CPS.
Definition 2 Cyber capacity semantic of service can be denoted as Cs=(class,in|out,timeliness,price,c-value).Here,class is the class name of the cyber service,parameter pair in|out denotes the input and the output data formats and values of the service,timeliness indicates a period which service must spend for completing a task,price denotes the average price of the service respectively,c-value is cyber capacity index which demonstrates the performance of service software aspects based on the past working.
In definition 2,cyber capacity index value is evaluated from two aspects:timeliness and past judgment.
For each node di,it has a time list Time=(t-d,…)(t-d<…)which indicates time costs in the past for the same task and ratio(t-)denotes the occurrence ratio of time cost t-(Σratio(t-dki)=1).Assume that diparticipates the task ntimes in the past.Then,for an anticipant working time,dt,capacity value of timeliness can be calculated as

whereβ∈[0,1]is the parameter which is given the same as in Eq.(2).
Let node diprovide service n times in the past.Each time of service generates a judgment value jud(di)(jud(di)∈ [0,1].Assume that there are mtimes of malicious judgments to di.Then,the capacity value of past judgment can be calculated as

Therefore,cyber capacity value,c-value,can be calculated as

Based on definitions 1,2,each node in CPS can be described as node=(Ps,Cs).
2.2 Physical environment
Physical environment is an objective concept which describes the elements around the CPS node,including location,time or status,etc.We define semantic of physical environment as follows:
Definition 3 Physical environment can be described asℑ=(L,P,S,C),where L,P,S and Crepresent the physical information sets of location,time,status and constraint,respectively.
Here,L=(loc1,loc2,…)is space set to describe the physical location information of the objects in CPS.P=(p1,p2,…)is set to describe the planning time information.S=(s1,s2,…)is the set of status descriptions for nodes in CPS.C={ci(xj)|xj∈L∨P∨S}is constraint which can identify the physical environment semantic elements.
2.3 Task semantic
Task denotes application needs from users.It gives all pre-conditions as a criterion for CPS nodes to measure whether they can achieve the task′s goals or not.Therefore,in definition 3,we describe the task semantic from both cyber and the physical aspects as follows:
Definition 4 Task semantic is a set as T=(T1,T2,…),where sub-task Tican be defined as Ti=(TClassi,Statusi,Goali,Costi,Enviri,Consi).Here,TClassidenotes the class of task,Statusithe set of original facts which are input data given in advance,Goalithe set of task′s anticipative goals,Costi,Enviriand Considenote the requirements of cost,physical environment and constraints for the task,respectively.
As for environment requirements,Enviriis described as semantic format in definition 3.And semantic of constraints,Consi,indicates the limitations for nodes which tends to accept the task except environment constraints.For example,there is a sub-task semantic as

{(community1),(13:00-14:00AM),(free),(before14:00)},(node∈community1))
We can see send_data denotes the type of task is sending data,node1and node3point out that the task is to send data from original node node1to goal node node3.At the same time,location of node1is community1,anticipant working period is 13:00-14:00AM,node1is in free status and the work must be completed before 14:00 AM.In addition,the task assigns that it must be executed by node which belongs to community1.
2.4 Social semantic
According to the organization method of social network,each node has the information which records the node′s communities and its relationships or friends.These social items of node can be acquired from node personal information or profiles.In this paper,social semantic of node in CPS describes the detail relationships among nodes and communities where nodes locate in.We define social semantic of node as follows:
Definition 5 Social semantic of node is a set as S=(Community,Relationship).Here,Community=(c1,c2,…)denotes the communities which nodes locate in and Relationship=(r1(di),r2(dj),…)denotes the relationships between nodes.
3 Rule Based Semantic Reasoning for Service Organizing
3.1 Horn clause
Horn clause is a clause(a disjunction of literals)with at most one positive literal[14].It plays a basic role in logic programming and is important for constructive logic.Due to Horn clause contains at most one positive literal,it is widely used in knowledge reasoning and rule representation[15].In this paper,we introduce Horn clause in order to realize the logical condition reasoning for service self-organizing.
Definition 6 Horn clause is a clause which has one positive literal at most.Horn clause can be written in form as follows

where Piand Qare propositions,and∧,→are logic connectors.Eq.(8)means that the literal Q can be realized while all the propositions Pican be satisfied.
For reasoning,Horn clause can be expressed three formats as follows:
(1)A Horn clause with both positive literals Piand Qis called a rule clause,which is in form of P1∧P2∧…∧Pn→Q.
(2)A Horn clause with no positive literals Q is called a goal clause,which is in form of P1∧P2∧…∧Pn→.
(3)A Horn clause with no precondition literals Piis called a fact,which is in form of→Q.
(2)抽象域上的操作:抽象域上的操作是对程序中的具体操作的抽象刻画。用来描述程序在具体域中的例如赋值操作、条件判断操作和程序循环执行等操作。
Based on definition 6,we can achieve self-organizing for service selection in formal representing and reasoning through Horn clause.For example,goal solving by node can be represented as in1∧in2∧…∧inn→out,and the status of task semantic can be represented as→statusi.
3.2 Rule based environment measurement
We propose several constraints for environment semantic in order to make environment measurement feasible.
Constraint 1 Each environment can be described as a fact in form of Horn clause→ℑ.
Constraint 1shows that all elements of environment semantic,including L,P,Sand C,are positive literals.
Constraint 2 For task semantic,requirement of environment can be described as a rule in form of Horn clause asℑ→Ti.Enviri.
Nodes of CPS work with physical limitations which we define as environment in the paper.Environment aware measurement aims to evaluate whether the real-time environment around a node can satisfy the task environment requirement or not.Firstly,we propose a match function for our measurement.
Definition 7 Let Xbe a set of facts and ybe a requirement.We define a match function X|→y while there is a the set of fact Xwhich can meet the requirement yin form of Horn clause as follows

where,x1∈X,…,xn∈X.
Then,we propose the semantics of match function in physical environment as

where p1.st denotes the starting time and p1.et the ending time of parameter p1.
Based on definition 7,we can define environment measurement as a group of rule Horn clause as
Let an environment requirement of task be Ti.Envir.For eachℑ,environment measurement can be defined as following algorithms.
Algorithm 1 Environment measurement
Step1

Step2 For each requirement xj,which has relationship with xj∈Ti.Envir.L∪Ti.Envir.P∪Ti.Envir.S∪Ti.Envir.C,ℑutilizes match function to find out whether there is a set of location factsℑ.Lwithℑ|→xj.
Step3 If there is xjwhich can meets functionℑ|→xj,then N1←N1-1.
Step4 Repeat steps 2and 3until all requirements xjhave been measured by match function.
Step5 If N1=0,the requirement Ti.Envir is satisfied byℑandℑ→Ti.Envir.And else,there is xjwhich can not be satisfied by match function.
For example,suppose there are environment semanticℑ1= (loc1,[20:00—22:00],(s1,s2,s3),∅),and environment requirement,then environment aware measurement can output the ruleℑ→Ti.Envir.
3.3 Rule based capacity evaluation
For feasible service selection,we also propose several constraints for semantic in order to make the descriptions more clearly understandable for CPS node.
Constraint 3 For each task semantic,there is a constraint as
Ti.Goal≠ ∅ ∧Ti.Status≠ ∅This constraint means task semantic will be invalid while it does not specify its goals and preconditions.
Constraint 4 Goal constraint denotes that for a set of task T=(T1,T2,…),there is a constraint as

That means all sub-tasks of Tcannot have same goals.
Constraint 5 For a node,it has an I|Oconstraint of cyber service and physical device as
Constraint 5points out that all node services should have a concordant input or output ports for service providing.Here,node.Ps.i|→node.Cs.in means that the physical device input port can match the cyber service input port.Likewise,node.Ps.O|→node.Cs.out denotes similar meanings.
We suppose that all nodes of CPS are the candidate service providers to solve complicated task,and nodes of CPS have various capacities with own prices.The net result of the above consideration is that CPS needs to find a feasible solution to evaluate competent services from nodes and reach a self-organized,temporary,and efficient service composition according to the task.
Capacity evaluation is an effective solution for CPS service selection.CPS can decide whether a node′s service should be selected or not depen-ding on its performance.To evaluate the performance of a candidate service,CPS should match the capacities of node service with tasks.
For a sub-task Ti,node in CPS nodejcan perform the task Tiwhile the following group of rule Horn clause can be satisfied

We propose the semantics of match function in service evaluation as
Suppose there is a sub-task Ti.For all nodes of CPS,service capacity evaluation consists of 6 steps as follows:
Algorithm 2 Service capacity evaluation
Step 1 N2←Ti.goal.
Step 2 For each goal∈Ti.Goal,match the goal with function as nodej.Ps.O∧nodej.Cs.out|→Ti.goal.If the function can be satisfied,N2←N2-1.
Step 3 Repeat steps 2and 3until all goals are evaluated by match function.
Step 4 If N2=0,go to step 5.Otherwise,algorithm finishes.Quit the service evaluation and evaluate(nodej)=0.
Step 5 For each nodej.Ps.i and nodej.Cs.in,measure whether the input ports can be satisfied by the facts of Ti.Status.If input ports cannot be satisfied by facts,quit this algorithm and evaluate(nodej)=0.Otherwise,go to the next step.
Step 6 Evaluate the cost requirement of Ti.If match function nodej.Cs.price|→Ti.cost is satisfied,the Horn clause nodej→Tiis valid and evaluate(nodej)=c-value(dj).Otherwise,eval-uate(nodej)=×c-value(dj).
Here,we propose an example to illustrate our algorithm.For T2.Status2= (s1,s2,s3),T2.Goal2=t1|g1,T2.Cost2=[0,10],there be node1=[I=(s1)|O=(t1),in=(s3)|out=(g1),price=13,0.9],node2=[I=(s1)|O=(t1),in=(s3)|out=(g1),price=5,1.0]and node2=[I=(s1,s4)|O=(t1),in=(s3)|out=(g1),price=14,1.0].Evaluation value of the above three nodes can be evaluated as 0.45,1and 0respectively by algorithm 2.
4 Service Self-Organizing for CPS
4.1 Task semantic decomposition

Through capacity evaluation,we can evaluate whether a task can be solved by CPS nodes.However,it is impossible to find single node which can provide scenario for every task.In some case,a node can just solve a part of goals of a complicated task.In this paper,we address a task semantic decomposition method in order to decompose task into two sub-tasks according to their goals and make the task solving feasible.
For a taskΤi,there is a set of goalsΤi.Goal′⊂Τi.Goal which cannot be solved by a node.We can decompose it into two task semantics,and,as in definition 8.
Definition 8 Task semantic decomposition can be defined as
whereΤi.Status′⊂Τi.Status,Τi.Cost′<Τi.Cost andΤi.Envir′⊂Τi.Envir are corresponding requirements of status,cost and environment ofΤi.Goal′.Eq.(15)means that complex task can be decomposed into two sub-tasks,and,which satisfy the conditionΤ=Τi.
In our consideration,a task,which can not be solved by any single node,should be decomposed into sub-tasks with the minimum number for reducing computing complexity.Therefore,we propose the algorithm of task decomposition for CPS.
Algorithm 3 Task semantic decomposition
Step 1 There are a taskΤi,and a set of nodes Node.For each nodej∈node,CPS builds up schema Rjto record the goals which can be solved by nodej.
Step 2 For each nodej∈node,CPS measuresΤi.goalkwith matching function in Eq.(14).
Step 3 If the rule of nodej.D.O∧nodej.N.out→Τi.goalkis true,Rj←Τi.goalk.
Step 4 Repeat steps 2and 3until all nodes get Rj.
Step 5 CPS calculates the set compositions with constraint as(∪Rj=Τi.Goal)∧(∩Rj=∅).
Step 6 CPS gets the Rjcomposition with the minimum sub-task number.The taskΤiis decomposed as in definition 8.
For example,there is a taskΤ3can not be solved by any single node in CPS.The decomposition is shown in Table 1.

Table 1 Example of task semantic decomposition
From Table 1,we can decomposeΤ3into two sub-tasks as
Here,corresponding status,cost and environment requirements of task are also decomposed with goal.
4.2 Organizing matrix
Based on environment-aware measurement and service capacity evaluation,we can establish three kinds of matrix for service organizing:Ca-pacity matrix,environment matrix and social matrix.Suppose a task vector K=[Τ1,Τ2,…,Τn]and node vector Z=[d1,d2,…,dm]T,and the three kinds of K×Z matrix can be defined as follows.
Definition 9 Capacity matrix can be defined as where value of evaluateijcomes from algorithm 2.
Likewise,we define the schema of environment measurement as environment matrix.
Definition 10 Environment matrix can be defined as

where value of environmentijcan be calculated as follows

Definition 11 Social constraint matrix can be defined as
where value of socialijcan be calculated as

4.3 Self-organizing mechanism for CPS service
As aforementioned,self-organizing aims to find out competent nodes to form a temporary organization in CPS and solve special tasks.We consider that CPS service organizing mechanism is established based on approaches of capacity optimal estimation and task goal solving.Our approach in this paper combines features of CPS from both cyber service and physical environment aspects.
Notice that our proposed capacity matrix,environment matrix and social constraint matrix show the capacity,environment and social constraint matching schema between task and nodes.Therefore,we propose the service self-organizing mechanism of CPS based on the above matrices,which consists of 12steps as in algorithm 4.
Algorithm 4 Self-organizing mechanism of CPS
Step 1 Task←Τi;Candidate←∅;Selected←∅.
Step 2 CPS delivers the task set Task to nodes which locate in its community.
Step 3 Each node dj,which receives the task semantic,transmits the task semantic to its neighbors,dk,which have relationship semantic dj.S.r(dk)with diand satisfy the constrains of dj.S→Τi.Cons.Then,djsends information to CPS sponsor for replying whether it would enter the service organizing and be a candidate node.
Step 4 For taskΤi∈Task and ultimate candidate nodes of CPS Z=[d1,d2,…,dm]T,CPS calculates the matrices ofΓ,ΨandΩ.
Step 5 ForΤi∈Task,if there is a node dl(dl∈Z)with(capacityil>0)∧(environmentil>0)∧(socialil=1),it denotes that taskΤican be solved by CPS.CPS selects the node dlwith value of max[capacityil+environmentil]∧(socialil=1),and Candidate←Τi|dl,Task←Task-Τi.
Step 6 For eachΤi|dl∈Candidate,CPS calculates the value of competence parameter as

Step 7 ForΤi∈Candidate,dlwith the min[competence(dl)]is selected,and Select←Τi|dl,Candidate←Candidate-Τi|dl.
Step 8 Repeat steps 6,7until Candidate=∅.
Step 9 If Task≠∅,CPS decomposes tasks through algorithm 3for eachΤi∈Task into a new task set dec_Τi.
Step 10 Task←∅;Task←dec_Τi.
Step 11 Repeat steps 2to 10until Task=∅.
Step 12 Return selected.
For complicated task,our self-organizing mechanism aims to algorithm 4to find out a node composition of CPS which meets not only both physical and cyber requirement but with the minimum costs and the maximum service capacities.
5 Examination
In this section,we employ a set of examinations for performance comparison to testify the feasibility of our proposed method.We utilize our peer-to-peer network simulator which is written in Java language.In our examination,there are 300nodes in 5working communities and the average out-degree of node is 5.Each our-degree of node means a social relationship between two nodes.As initial setting,physical and cyber capacity values of all nodes follow a normal distribution with mean 0.6and variance 0.1.The capacity semantics of nodes,including physical and cyber aspects,are generated at random in advanced.Parameter,β,is set as 0.8.
5.1 Unqualified service detection
In our proposed method,environment measurement and service capacity evaluation can detect unqualified services according to past data.Here,we conduct a set of examinations to testify the effects of unqualified service detection.We introduce with 20%and 40%unqualified services in our examination.In this examination,services are regarded as unqualified ones while their scores given by different methods are lower than 0.3.We adopt three groups of tests as follows:Group 1utilizes the average judgments of service for scoring service,Group 2utilizes the Bayesian rating method and Group 3adopts our proposed method as scores of p_value and c_value(any one score lower than 0.3is regarded as unqualified service).We record the average accuracies of unqualified service detections in different three groups.We can see the effects of unqualified service detection in following Figs.1(a,b)and the average accuracies of our method are about 97%and 93%in two cases of examination.Our method is obviously better than other two ones.However,we notice that the effect of our method is worse than other method at the beginning of examinations.In our consideration,the reason is that our method is proposed based on past data of service and the accuracy will be much better with the detection times growing up.In addition,Fig.1(c)shows the accuracies of unqualified service detection in two different detection criteria:Environment and cyber.Our proposed method can find out the unqualified service from both physical environment and cyber capacities aspects.

Fig.1 Effects on unqualified service detection
5.2 Successful ratio of service organization
In this examination,we set four groups of service organization method for effect comparison.In groups 4and 5,services are organized based on services which satisfies the task with highest values of physical environment and cyber capacities respectively.In group 6,services which have the highest selecting probabilities for the corresponding tasks in the past are selected for the new arriving complicated task.In group 7,we utilize our method to organize services for complicated task.We repeat the organization 100 times.Figs.2(a,b)show the average total successful ratios with 10%and 30%unqualified services respectively.We can see that our method is obviously better than other methods.The average total successful ratios in group 7are about 94.5%and 90.1%respectively.
In addition,we test the effect of task decomposition.We repeat service organization 100 times in two groups and the results are shown in Fig.2(c).Group 8adopts our proposed mechanism without task decomposition method while Group 9includs the method.We can see that the successful ratio is raised about 9.5%in group 9.The task semantic decomposition algorithm can decompose the complicated task into sub-task semantics for finding out services to solve them.From this point,task in group 9has more probabilities to find corresponding services.Such result manifests that our proposed task semantic decomposition method is efficient for service organization.
6 Conclusions
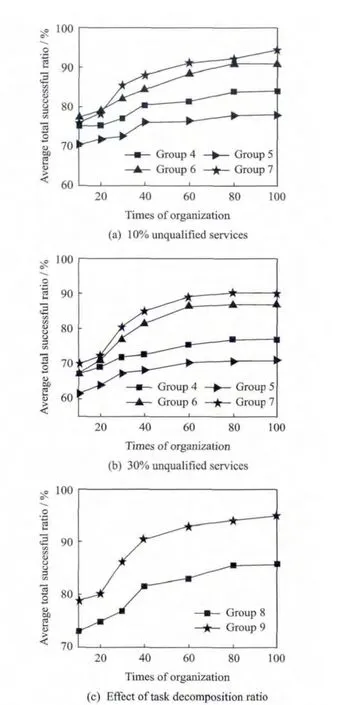
Fig.2 Effects on successful ratio of service organization
Different from service composition in internet environment,CPS faces the physical world limitations for its self-organizing service providing.To solve the problem,we address a physical environment sensitive and cyber capacity estimable mechanism for CPS service organizing.Our mechanism is based on formal semantic descriptions and theory of Horn clause,which are introduced for providing system readable information and reasoning rules.By presenting the methods of environment aware measurement and service capacity evaluation,we define task semantic decomposition for complicated task solving feasible and organizing matrix for identifying the matching degrees between CPS nodes and tasks.Finally,we propose the self-organizing mechanism for CPS to find out the most competent service composition.We plan to examine our methodology in simulation to verify feasibility and efficiency in future.Furthermore,we are utilizing our methodology and framework into smart connected cars application.
[1] Tan Y,Goddard S,Perez L C.A prototype architecture for cyber-physical systems[J].ACM SIGBED Review,2008,5(1):1-2.
[2] Westerman D,Spence P R,Brandon Van Der Heide.A social network as information:The effect of system generated reports of connectedness on credibility on Twitter[J].Computers in Human Behavior,2012,28:199-206.
[3] Song Zhen,Chen Yangquan.Feasibility analysis on optimal sensor selection in cyber-physical systems[C]//2009American Control Conference Hyatt Regency Riverfront.St.Louis,MO,USA:IEEE,2009:5368-5373.
[4] Lee E A.Cyber physical systems:Design challenges[C]//11th IEEE Symposium on Object Oriented Real-Time Distributed Computing.Orlando,Florida,USA:IEEE,2008:363-369.
[5] Dabholkar A,Gokhale A.An approach to middleware specialization for cyber physical systems[C]//29th IEEE International Conference on Distributed Computing Systems Workshops.Montreal,Québec,Canada:IEEE,2009:73-79.
[6] Antsaklis P.On control and cyber-physical systems:Challenges and opportunities for discrete event and hybrid systems[C]//9th International Workshop on Discrete Event Systems.Goteborg,Sweden:IEEE,2008:1.
[7] Cardenas A A,Amin S,Sastry S.Secure control:Towards survivable cyber-physical systems[C]//Pro-ceedings of the 28th International Conference on Distributed Computing Systems Workshops.Beijing,China:IEEE Society,2008:495-500.
[8] Xia Feng,Ma Longhua,Dong Jinxiangt,et al.Network QoS management in cyber-physical systems[C]//Proceedings of International Conference on Embedded Software and Systems Symposia.Chengdu,China:IEEE Society,2008:302-307.
[9] Kang K D,Son S H.Real-time data services for cyber physical systems[C]//Proceedings of 28th International Conference on Distributed Computing Systems Workshops.Beijing,China:IEEE,2008:483-488.
[10]Buczak A L,Wang H H,Darabi H,et al.Genetic algorithm convergence study for sensor network optimization[J].Information Sciences,2001,133(3):267-282.
[11]Bian F,Kempe D,Govindan R.Utility-based sensor selection[C]//Proceedings of International Conference on Information Processing in Sensor Networks(IPSN).Nashville,TN:IEEE,2006:11-18.
[12]Li Dongsheng,Lv Qin,Xie Xing,et al.Interestbased real-time content recommendation in online social communities[J].Knowledge-Based Systems,2012,28:1-12.
[13]Westerman D,Spence P R,Brandon Van Der Heide.A trust calculating algorithm based on social networking service user′s context[J].Chinese Journal of Computers,2011,34(12):2403-2413.
[14]Alfred Horn.On sentences which are true of direct unions of algebras[J].Journal of Symbolic Logic,1951,16:14-21.
[15]Lautenbach K.Logical reasoning and petri nets[C]//Proceedings of the ICATPN 2003.Berlin,Heidelberg:Springer-Verlag,2003,LNCS 2679:276-295.
猜你喜欢
疯狂英语·初中版(2023年7期)2023-08-18 05:01:35
四川大学学报(自然科学版)(2023年1期)2023-04-29 00:44:03
榆林学院学报(2022年4期)2022-08-02 14:30:42
Chinese Physics B(2021年3期)2021-03-19 03:20:52
摄影与摄像(2020年11期)2020-09-10 07:22:44
艺术评鉴(2020年2期)2020-03-23 13:34:24
赤水源(2018年6期)2018-12-06 08:38:10
计算机与生活(2018年8期)2018-08-15 08:24:34
理科考试研究·高中(2016年9期)2016-05-14 00:12:18
小说月刊(2015年6期)2015-04-23 08:49:00
 Transactions of Nanjing University of Aeronautics and Astronautics2014年4期
Transactions of Nanjing University of Aeronautics and Astronautics2014年4期
- Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Hybrid Multipopulation Cellular Genetic Algorithm and Its Performance
- Influence of Setting Error of Tool on Tooth Profile and Contact Point of Face Gear Drive
- Runge-Kutta Multi-resolution Time-Domain Method for Modeling 3DDielectric Curved Objects
- Parameter Optimization Method for Gaussian Mixture Model with Data Evolution
- Optimal Power Management for Antagonizing Between Radar and Jamming Based on Continuous Game Theory
- Threshold Selection Method Based on Reciprocal Gray Entropy and Artificial Bee Colony Optimization