基于ZigBee技术的患者定位系统的研究与实现
2014-04-23 05:19:54周佩光张文超
生命科学仪器 2014年5期
周佩光,张文超
(杭州电子科技大学电子信息学院,浙江 杭州 310018)
引言
全球定位系统(GPS)已在室外定位中成功应用,定位服务在人们活动的室内场所得以广泛应用的渴求日渐突出,尤其是医院患者众多,又需要长时间监测的环境下,一个能够准确定位、对人员不断检测并且工作稳定的患者定位管理系统尤为需要[1]。现有室内定位技术中,Zigbee技术由于定位成本低、方法实现灵活而逐渐成为研究的热点。然而,室内无线信号的不精确、不稳定也给实现精确定位带来很大的难度[2,5]。因此,本文以ZigBee无线网络为应用平台,采用位置指纹法完成定位,针对定位所需的两个阶段中涉及的相关技术进行研究。从分析采样数据的特征入手,对测距方程进行修正。提出一种优化参考节点布局方案,极大地消除了环境因数A、n的影响,提高位置指纹的匹配效率和准确度。设计了定位系统用户操作界面,进行了实验验证。最后实验结果表明:基于Zigbee平台采用位置指纹方法定位法和优化的参考节点布局方案可使精度大幅提高,二者有机结合后使定位精度<1m。
1 基于Zigbee的RSSI测距原理及修正
1.1 RSSI测距模型
RSSI测距模型,是在已知发射功率的情况下,通过测量接收点收到的信号强度,使用信号传播模型将传播损耗转换为距离的数学模型,该模型也称为长期衰落模型,其表达式为[6]。

式(1)中:d为目标节点和信标节点间的距离;n为路径损耗指数,这个参数依赖周围的环境和建筑物的类型,表示路径损耗随距离的增加而增大的快慢;xσt是以dB为单位,且标准偏差为σ的零均值正态分布随机变量;Pd0是相距为d0m处节点接收到的信号强度值。通常将d0m设定为1m,这样Pd0就有一个标准的强度值为A,其值通常为常数,得到A=Pd0+xσt,则式(1)可以转换为Pd=A-10nlgd[7],由此可以测得距离为:

1.2 测距平台构建
测试平台采用TI CC2530作为射频芯片,CC2530结合了高性能2.4GHz射频收发器和工业级小巧高效的8051控制器,其输出功率可通过软件设置8个功率输出级[8]。从CC2530接收到的MAC帧中读出芯片寄存器RSSI_VAL的值,并将该值进行修正,然后转换成接收节点管脚的功率值。修正公式为:P= PRSSI_VAL+ (-73)。其信号强度采集流程如图1所示。
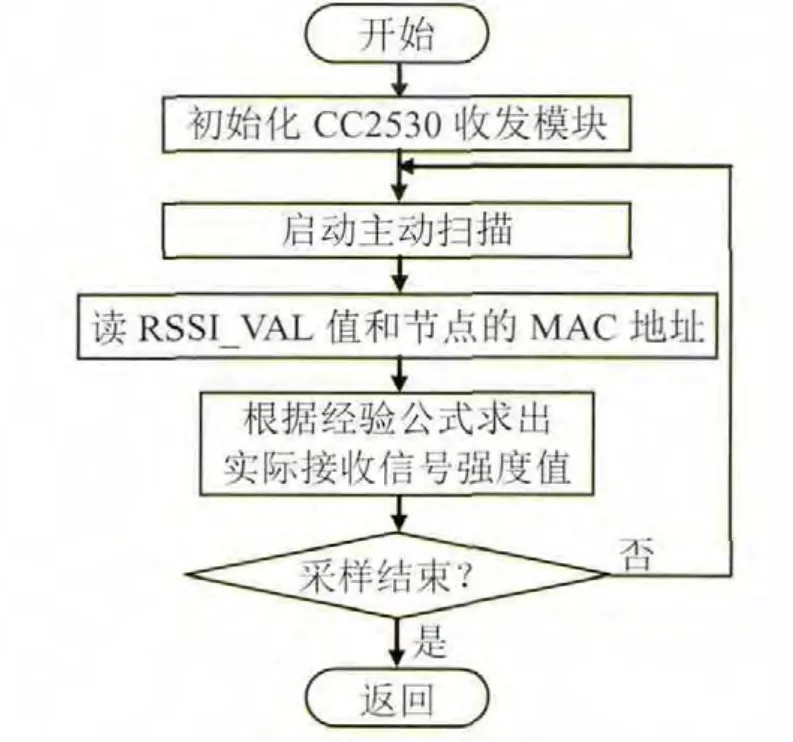
图1CC2530信号强度采集流程图
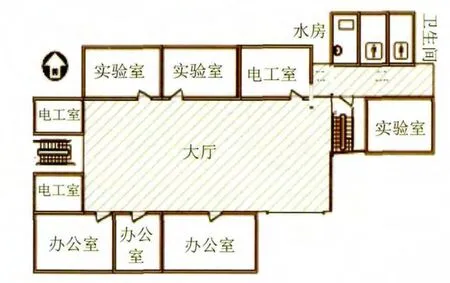
图2实验场地的平面布局图
此外,选择本校第2教学中楼1楼作为实验场地。内有大厅、楼道、教师办公室、学生实验室、水房和卫生间等典型的公共设施,具有一定的代表性,整个场地的平面布局如图2所示。
1.3 数据特性分析
由式(2)可知Pd和d之间的关系会受到Pd0和n取值的影响。图3给出了n为常数、Pd0为不同取值条件下Pd和d之间的关系。从图中可以看出,Pd在信号传播距离的前段出现了强烈的衰减,且衰减速度很快。而在传播距离后段衰减缓慢,且衰减过程近似为线性。而且,Pd0增加时,相同Pd值对应的d也相应的增加。
图4给出了Pd0为常数,n为不同取值条件下Pd和d之间的关系。可以看出,相同Pd值下d与n的关系成反比特性。n取值越小,表明环境因素引起的信号衰减越小,环境影响越弱,因此信号可以传播的距离越远。
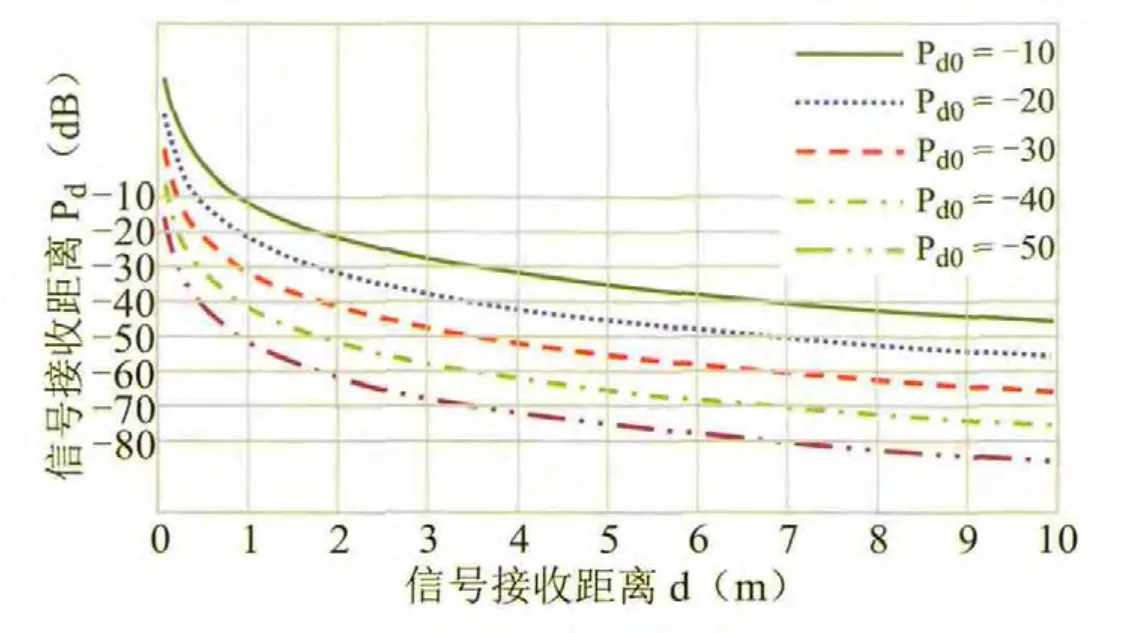
图3n=3.5、Pd0为不同, Pd和d之间的关系
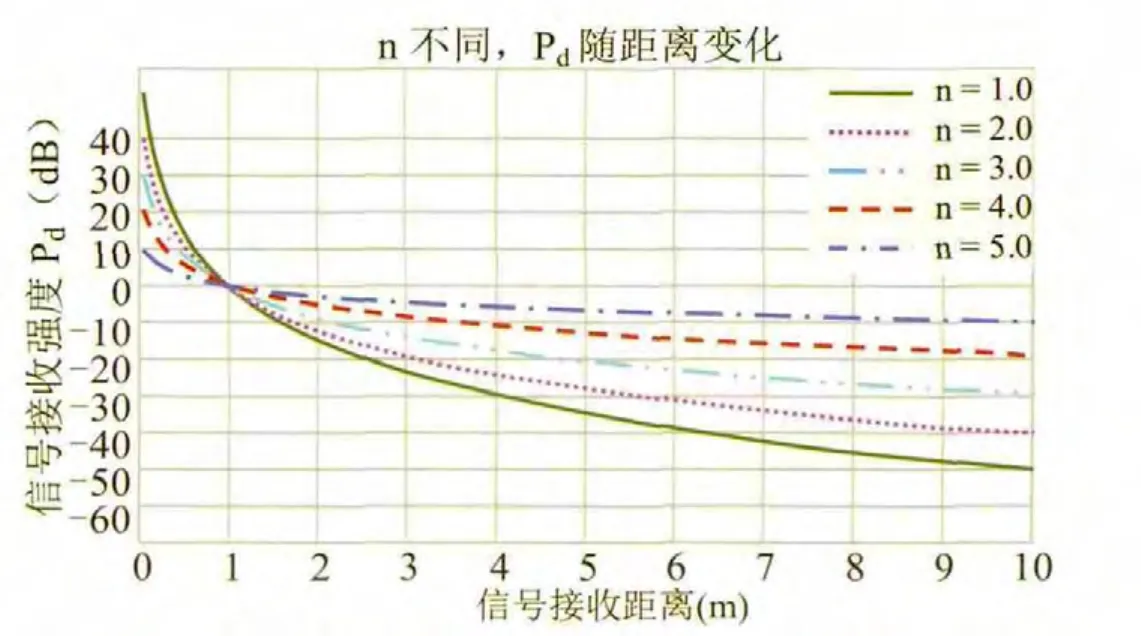
图4Pd0=0、n为不同, Pd和d之间的关系
1.4 测距方程的修正
通过以上理论分析可以看出,虽然信号强度与信号传播距离之间并不满足绝对的线性关系,但是他们在数值上的变化趋势却存在着一定的规律性,即信号强度随传播距离的增加而降低。虽然这种非线性关系为建立两者之间变化规律的数学模型比较困难,但是我们可以根据当前环境每间隔2m测得的数据进行多次测算环境因数,修整n值使得测距算法更加符合实际[9]。
在实际室内环境中通过ZigBee终端设备在不同位置测得的信号强度是否符合理论上的这种对应关系?为此,在图2所示的实验场地内对ZigBee路由器的信号强度进行了采样,采样频率2Hz。间距1m时测得RSSI值为-46,因此Pd0为-46。同时测得15m处RSSI值为-72。由式(2)可求得n=2.1。
实际值和理论值曲线对比如图5红色和蓝色曲线。图中可以看出两个现象:
1、8m以内信号接收强度和距离数值衰落趋势比较吻合且落差明显。
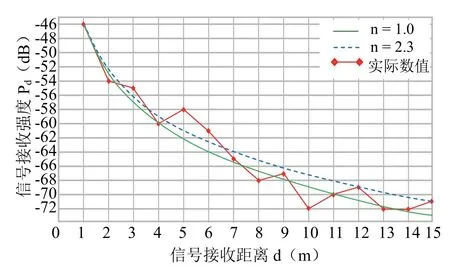
图5理论值与实际值对比图
2、大于8m的范围实际值与理论值有较大差距,使得根据公式测距结果没有足够可靠性。
为此,本文对测距算法进行分析和改进。通常取首尾两点测算环境因数n值,但是进一步观察发现,此次试验末尾点并不能准确代表后半部分实测数据的变化特征,导致误差增大。这里我们将传统测算方法进行改进,取后半段距离和接收信号强度均取平均值求取环境参数n值,得n=2.3。
改进后距离和信号强度对应关系如图5中的绿色曲线(实线)。不难发现,在保持近距离测距准确度的同时提高了整体的测距准确度。
2 位置指纹定位法
2.1 位置指纹定位法的优点
总体上讲,目前出现并获得应用的各种室内定位技术有近似法、几何法和位置指纹法三种。
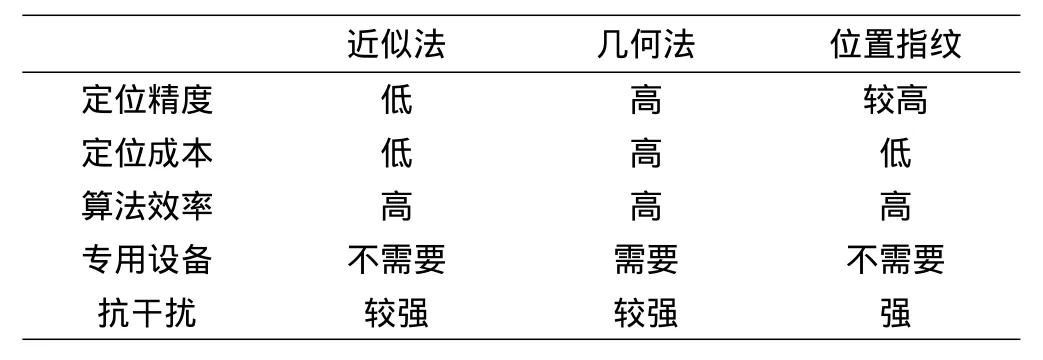
表1三种室内定位技术特点的比较
表1给出了三种室内定位技术特点的比较。
可以看出,虽然几何法可以获得较高的定位精度,但是需要配备专用的硬件设备。位置指纹法虽然在定位精度略低,但其定位成本低,可以方便地在终端设备上实现。而且,位置指纹法无需了解网络接入设备的实际安装位置及发射功率,抗干扰能力强[10]。以上特点都与ZigBee技术所倡导的低成本和低复杂度要求相吻合。
此外,文献[3]中采用RFID(射频识别)和Zigbee技术相结合的定位方案,先通过RFID确定局部区域再用Zigbee实现定位。虽然是先分区再定位的思想,但不难发现两个模块结合的节点增加了成本功耗,而且使用不便,系统兼容性差。
文献[4]中采用了基于Zigbee的场景指纹定位方案在大小为6.05×5.02m2的测试环境采用4个参考节点进行定位。由于是实验本身是小范围,文中没有就Zigbee远距离(>10m)测距精度以及大空间(>100m2)的节点布局进行分析优化。
还有目前定位精度最高的UWB(超宽带)定位技术,可达到20cm左右的定位精度。但是其需要专用的服务器、交换机以及网线连接。成本大、国内使用少,目前还无法广泛推广应用。而且,当人员走进室内时,定位系统能够准确判断出其所在的接近位置就可以提供所在室内位置的全方位信息,而没有必要将人员的位置估计精确到厘米级。
因此,以ZigBee通信网络为平台实现位置指纹法定位是一个兼顾定位精度和成本要求的合理方案。
2.2 位置指纹定位的实施
位置指纹法将移动终端设备在定位区域内不同位置采集到的网络接入设备的信号强度作为场景特征来推断移动终端设备所处位置,其定位过程可分为离线采样阶段和实时定位阶段。
其中,网络接入设备为ZigBee协调器/路由器,移动终端设备为ZigBee终端设备。
(1)离线采样阶段
在定位区域内设置若干采样位置,并在每个位置上记录所有网络接入设备的信号强度信息。生成由各ZigBee路由器信号强度组成的位置指纹向量RSSI=[rssi1,rssi2,…,rssi9]T。向量元素rssii表示在i点测得的信号强度(i=1,…,9)。由全部RSSI可建立一个关于信号强度与采样位置关系的数据库,即位置指纹数据库。
(2)实时定位阶段
利用相关算法将其与位置指纹数据库中的RSSI进行比较、匹配。首先确定所在局部区域,并获取区域中的参考点,最终采用局部三边定位算法获得待测点的位置估计[10]。
2.3 参考点定位布局优化
在室内定位的实际应用中,信号干扰和物体移动对测距造成影响。这也导致了室内定位的很多相关研究理论在仿真分析中得到理想结果,然而实际应用结果并不理想[11]。
在位置指纹定位过程中,合理的间距设计和组网规划可以有效节约成本,避免位置漂移(由于信号衰减量突变,造成的位置瞬间偏离正常轨迹。多由参考节点与待测点距离太远引起)的现象。从图5可知,基于RSSI的测距,在9米左右其变化规律比较明显易于判断。实际实验过程中,通常在人员密集的实验室或教室中取5到7米为参考点间距,而人员稀少的大厅取7到9米为参考点间距。同时为了降低成本和减小算法代码量,用最少参考节点实现最大面积的网络覆盖,每个局部区域尽量布局为等腰直角三角形,参考节点布局图如图6。
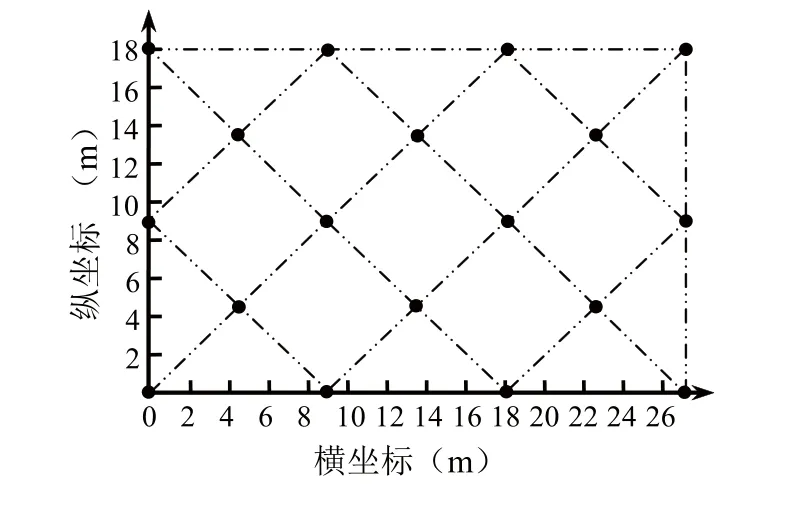
图6间距9m等腰直角三角形布局
而此时,由于待测点所测得最近三个节点所在区域,属于局部小范围,认为在t时刻最近的三个参考点所受到的干扰相近。则待测点到所在范围三个参考点的距离分别为:
由以上三边公式可以发现,都存在干扰项Xσ t,而d与干扰存在指数关系,不难发现通过除法求比值可以化简为。

事实上,为了计算出定位坐标,需要通过比例式(7)和参考节点坐标测算可得最接近实际的坐标关系:
从而计算出节点位置信息(x,y)。
3 Zigbee定位实验
实验选取7×12 m2的长方形实验室环境进行实验,参考节点间距为6m,利用基于位置指纹法和优化参考节点布局的三边定位算法进行定位,定位过程中对10个位置进行定位结果采样,得测量结果如表2和图7。
从定位实验结果来看,基于优化的位置指纹定位方案具有较高的定位精度,且定位结果的波动范围相对较小,具有较高的可靠性。
4 结语
本文首先对基于Zigbee平台的RSSI测距算法进行修正,并通过具体的实验验证了其有效性。
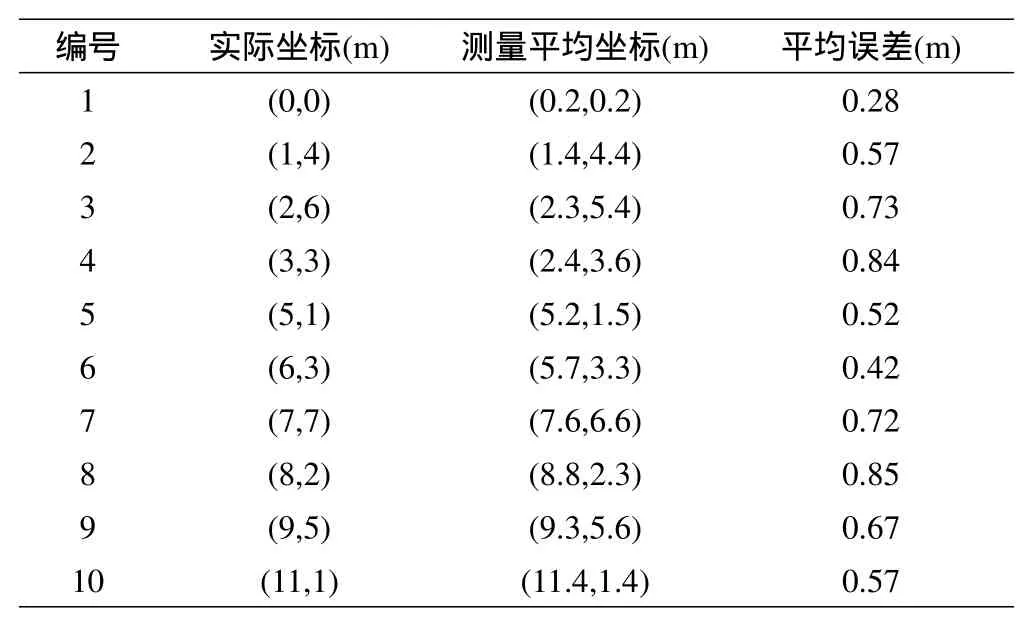
表2定位测量结果
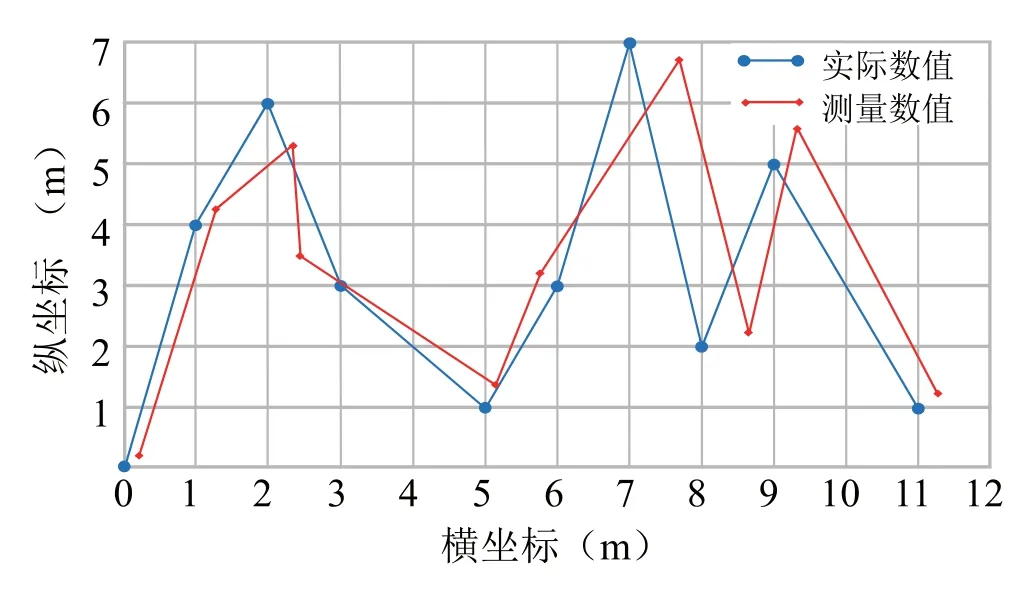
图7定位轨迹理论值实际值对比图
从基于Zigbee平台定位的原理和实验要求上,提出采用位置指纹定位法与优化的参考节点布局有机结合的方案。该方案定位算法主要从三方面改善了常用的基于Zigbee平台定位方法的不足:
一、在 RSSI 测距定位前,环境参数的确定需根据空间大小计算求平均进行优化,提高了基本测距的准确度和可靠性;
二、确定了最优参考节点间距以及布局方案,提高了参考节点利用率,有效控制成本;
三、利用比值抵消了待测点到参考节点的信号干扰,同时采用先确定区域再局部定位的思想。提高测量精度,也避免了随着信标节点与待测点距离的增加,造成定位结果误差呈现累积效应。因为待测点总是选择与之距离最近的信标节点作为参考节点,所以当待定位节点在室内环境中的位置发生变化时,其选择的参考节点也会发生相应的位置变化,从而避免了定位结果累积误差的出现。
实验结果证明,在基于Zigbee平台的室内定位系统中,采用本文提出的定位方案,能够实现在医院室内定位应用的需求。达到对患者位置信息、以及监测信息及时准确的上传汇报。
[1] 吴雨航, 吴才聪, 陈秀万. 介绍几种室内定位技术. 中国测绘报,2008, 1.29(003).
[2] 沈玉龙, 裴庆祺, 马建峰, 等. 无线传感器网络安全技术概论.北京: 人民邮电出版社, 2010: 1. 3.
[3] 叶涛. 基于RFID 与 ZigBee 的室内定位跟踪技术研究. 重庆大学,2011.
[4] 李泳. 基于Zigbee技术的室内定位系统设计. 上海师范大学出版社, 2008.
[5] 李明峰, 冯宝红, 刘三枝, 等. GPS定位技术及其应用(第一版).北京: 国防工业出版社, 2006.
[6] 徐可可. 基于ZigBee无线传感器网络的移动定位技术及应用.南京理工大学, 2009.
[7] 章坚武, 张璐, 应瑛, 等. 基于ZigBee的RSSI测距研究.传感技术学报, 2009 (2): 285-288.
[8] 于宏毅, 李欧, 张效义, 等. 无线传感器网路理论、技术与实现.北京: 国防工业出版社, 2010: 255,272.
[9] 高明, 吉祥, 刘宇, 等. ZigBee技术在室内定位中的应用. 西安工业大学学报, 2010 (1): 9-12.
[10] 付军安, 卢涵宇, 王合闯, 等.基于ZigBee的定位系统环境参数的探讨. 长江大学学报, 2011 (4): 86-88.
[11] 范静辉, 叶宏. ZigBee室内定位系统定位精度优化算法研究.电视技术, 2013, 37(5): 123-124.
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
科学(2020年3期)2020-01-06 04:02:51
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
现代测绘(2018年1期)2018-03-06 05:16:16
电子制作(2017年7期)2017-06-05 09:36:13
测绘通报(2016年9期)2016-12-15 01:56:16
计算机工程(2015年8期)2015-07-03 12:19:45
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55