
行业动态(新技术)
2014-04-21 05:57:16
机器人技术与应用 2014年4期
《机器人用谐波齿轮减速器》国家标准颁布实施
国家质量监督检验检疫总局、国家标准化管理委员会在《中华人民共和国国家标准公告》2014年第14号中发布,《机器人用谐波齿轮减速器》(GB/T 30819-2014)已于2014年5月6日发布,并于2014年12月31日起正式实施。
GB/T 30819-2014《机器人用谐波齿轮减速器》国家标准由苏州绿的谐波传动科技有限公司、江苏省减速机产品质量监督检验中心、上海ABB工程有限公司和北京工商大学负责编制。标准基本涵盖了机器人用谐波齿轮减速器分类原则、技术要求、性能指标、试验方法、检验规则和包装、运输、储存等方面的内容,对谐波减速器的产品型号、分类、外形尺寸、传动效率、扭转刚度、噪声、温升、使用寿命等技术指标以及相应的试验方法、试验设备和检验规则等主要技术内容进行了规范,对于我国的机器人行业,以及半导体制造业、光学器械、医疗器械、通信设备、航空、航天、机床、能源等领域的精密谐波产品具有积极的指导意义。
谐波减速器是机器人实现运动功能的核心部件,是轻型工业机器人和机械臂可靠、精确运行不可或缺的组成部分,谐波减速器与一般的齿轮传动相比较,具有运动精度高、传动比大、重量轻、体积小、承载能力大、效率高、容易实现零回差、并能在密闭空间和介质辐射的工况下正常工作等优点,现在约有90%的谐波减速器应用在机器人工业和精密定位系统中,谐波减速器已成为现代工业重要的基础部件。
国内谐波产品技术指标由于长期低于国外,造成国内以机器人行业为主的先进制造业所使用的谐波减速器严重依赖进口。近年,苏州绿的谐波传动科技有限公司等已经逐步攻克谐波传动技术瓶颈,并具备了规模生产的技术与能力,产品迅速占领市场,打破了国外垄断。随着《机器人用谐波齿轮减速器》国家标准的推出,将会指导更多的国产减速器达到国际水准,这对促进我国谐波传动技术进步和产品升级,推动机器人行业的健康发展具有十分重要的意义。 (王)
天津成功研制纯意念控制机器人
6月14日,天津大学和天津市人民医院发布共同研制成功人工神经康复机器人系统“神工一号”,这是一台适用于全肢体中风康复的“纯意念控制”人工神经机器人系统,能够真正实现大脑皮层与肌肉活动的同步耦合,做到身随意动。
“纯意念控制”人工神经机器人系统研发历时10年,是国家863计划、“十二五”国家科技支撑计划和国家优秀青年科学基金重点支持项目,在复合想象动作信息解析与处理、皮层—肌肉活动同步耦合优化、中风后抑郁脑电非线性特征提取与筛查等关键技术上取得了重大突破,目前已拥有包括23项授权国家发明专利、1项软件著作权在内的自主知识产权集群。
(来源:网易)

深圳先进院研发出康复用外骨骼机器人
日前,中国科学院深圳先进技术研究院研发出一款可穿戴式下肢康复用外骨骼机器人,成功实现截瘫病人穿戴机器人后站立行走,向产业化应用迈出关键一步。
该款机器人采用小型化的动力系统及欠驱动机械结构,运用安全可靠的柔性控制来实现外骨骼机器人稳定的步态。与国内外同类型机器人相比,其具有结构紧凑、多控制模式、智能步态规划、康复训练与助力行走兼顾的特点。

(来源:深圳先进技术研究院)
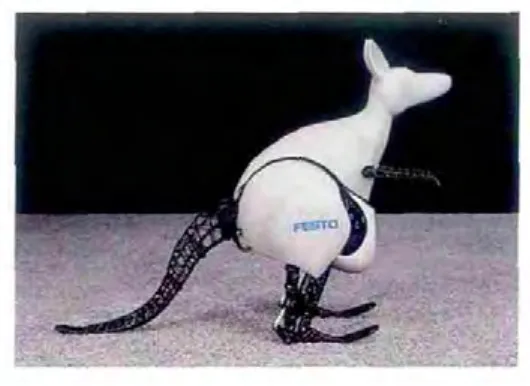
德国仿生袋鼠机器人面世
日前,德国科技公司费斯托(Festo)研发的一款名为“电子袋鼠”(Bionic Kangaroo)的机器人问世。这款机器人可达到袋鼠跳跃的高度,使得电子器械实现跳跃技能,引发业界关注。
这款机器人身高超过1m,体重约7kg,其每次实现的跳跃动作大致在40cm高、80cm长的范围内。电子袋鼠利用气动系统控制,在触地爪部内层的压缩空气推力作用下,实现向上向前跳跃动作。机器人每完成一次跳跃动作,其爪部便会储存空气能量以继续下一次的跳跃动作。
电子袋鼠的身体后部还安装了一根尾巴,以帮助其保持机体平衡。通过传感装置,电子袋鼠还能够将每次准备跳跃动作时需储存的能量数据传达给研发人员。研发制造人员表示,电子袋鼠将主要应用在能源技术储备方面。
德国费斯托公司在机器人领域声誉斐然,2008年面世的水母机器人(Aqua Jelly)、2013年成功开发出的仿生蜻蜓机器人都是其杰作。
(来源:IEEE)
美国利用活体肌肉细胞驱动机器人
美国伊利诺伊大学的研究人员日前成功研制出一款由活体肌肉细胞驱动来行走的微型生物机器人。这款机器人由生物肌肉和机械部件组成,靠电流控制移动,利用肌肉伸缩推动自身行走。
这款微型机器人由柔韧3D打印水凝胶材料和活细胞制成,体长不足1cm,非常结实兼具柔韧灵活性,可以像关节一样弯曲,研究人员通过调控电流脉冲频率控制机器人的行走速度。

(来源:中国科技网)
美科学家研制可变形新型材料
美国麻省理工学院科学家最新研制出一种由混合蜡和泡沫制成的先进变形材料,可使机器人在坚硬和柔软状态之间进行变换,并变形至不同外型。这种材料不仅成本低,而且通过变形可以拥有特殊的能力,可用于制造可变形外科手术机器人,使其在没有伤害任何器官和组织的情况下抵达特殊区域,也可用于搜寻营救任务,变形机器人可以钻进碎石之中寻找幸存者。
据了解,这种变形材料在每个泡沫涂层框架中放置一根连线,可以通电加热并融化周边的蜡涂层。蜡涂层在适度加热的情况下,可以从坚硬外层转变为柔软的表面。关闭电流后,材料冷却恢复至原来的刚硬状态。
这种材料还具有自愈能力,如果蜡涂层破裂,可以加热再冷却,该结构将恢复至最初状态。

(来源:科学网)
美国推出六脚奔跑机器人
美国佛罗里达州Robotics Unlimited公司研发出一款奔跑的机器人,取名为“Out Runner”。
该机器人的外形非常独特,可通过旋转6条腿在不同的地面上奔跑,时速达到32km/h,而且不需要借助传感器与控制运动运算系统,就能在移动中保持稳定和平衡,其腿部装有能源储存系统,能将奔跑中的动能转化成其他能量,非常节能。 (来源:IEEE)
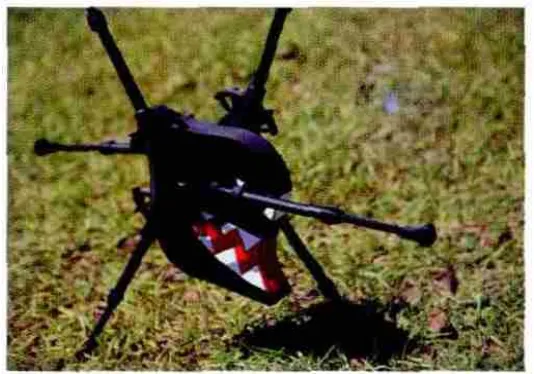
韩国研发新型奔跑机器人
近日,韩国研制出一款新型奔跑机器人,时速高达约46km/h,几乎达到了美国猎豹机器人的速度。
这款被命名为“小恐龙” (Raptor)的双腿机器人由韩国先进科技学院(KAIST)研发,约重3kg,目前只能在跑步机上进行运动。其腿部采用刀片组装的技术,每条腿各有一台电机驱动并附有一个阿基里斯肌腱减震系统,还拥有一条尾巴用来保持平衡,研究者在跑步机上放置障碍物,该款机器人可自主跨越障碍,继续奔跑。
(来源:IEEE)
猜你喜欢
铁道通信信号(2019年10期)2019-11-25 09:40:54
军事文摘(2018年24期)2018-12-26 00:57:40
小天使·一年级语数英综合(2018年9期)2018-10-16 06:30:16
小天使·一年级语数英综合(2017年9期)2017-10-20 18:33:53
小天使·一年级语数英综合(2017年1期)2017-02-16 10:14:48
现代商贸工业(2016年35期)2016-04-09 06:59:58
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
电源技术(2015年11期)2015-08-22 08:50:58
电测与仪表(2015年8期)2015-04-09 11:50:00
河南科技(2014年23期)2014-02-27 14:18:56
