
变位机在机器人焊接工作站中的应用
2014-02-25 11:19李素萍李永刚
机器人技术与应用 2014年4期
李素萍 李永刚
(安川首钢机器人有限公司,北京,100176)
0 前言
目前我国汽车行业飞速发展,车型更新换代快,汽车产量和品种大幅增加,汽车市场的竞争也日趋激烈。为提高生产效率、提高产品质量、降低成本,机器人在汽车行业的应用越来越普遍。在汽车制造业中,为充分发挥机器人的功效,焊接机器人通常与各种焊接变位机组合使用,从而实现高效、优质的焊接生产。目前,焊接变位机已成为焊接机器人工作站不可缺少的组成部分,为发挥焊接机器人工作站更大的作用,变位机的标准化设计已成为缩短整个机器人焊接工作站加工周期的重要手段和发展趋势。
1 变位机的种类
目前,与焊接机器人配套使用的焊接变位机有多种结构形式,现将最常用的变位机类型分述如下。
1.1 单轴翻转变位机
其结构形式见图1。此变位机驱动采用伺服电机或者普通电机驱动,通常工作的翻转速度是可调的,其功能是配合焊接机器人按预定程序将夹具上的工件翻转一定的角度,以满足焊接要求,保证工件焊接质量。单轴翻转变位机在焊接机器人工作站中是应用最广泛的设备。

图1 单轴翻转变位机
1.2 单轴悬臂变位机
其结构形式见图2。此变位机驱动采用伺服电机,通常工作的翻转速度是可调的,其功能是配合焊接机器人按预定程序将夹具上的工件翻转一定的角度,以便满足焊接要求,保证工件焊接质量。这类变位机适合小型焊接工作站,节约空间,亦可实现一台机器人、两台变位机的高效率生产。
1.3 单轴水平回转变位机
其结构形式见图3。此变位机适合小型工作站、小工件的焊接,可实现±180°水平回转,满足工件焊接要求,保证工件焊接质量。

图3 单轴水平回转变位机
1.4 双轴标准变位机

图2 单轴悬臂变位机
其结构形式见图4。此变位机两轴均采用伺服电机驱动,焊接夹具实现翻转的同时,也能实现±180°水平回转,这使得机器人的工作空间和与夹具的相互协调能力大大增强,机器人焊接姿态和焊缝质量有很大提高。这类变位机适合小型焊接工作站,常用于小工件的焊接,如消声器的尾管、油箱等工件焊接。

图4 双轴标准变位机
1.5 L 型双轴变位机
其结构形式见图5。此变位机两轴均采用伺服电机驱动,焊接夹具可实现翻转的同时,亦可实现±180°水平回转,这使得机器人与夹具的相互协调能力大大增强,机器人焊接姿态和焊缝质量有很大提高。这类变位机的承载能力比上述双轴标准变位机大,第一轴的翻转角度亦大,适合较大工件的焊接。L 型双轴变位机是双轴变位机的升级设备。

图5 L 型双轴变位机
1.6 C 型双轴变位机
其结构形式见图6。此变位机与L 型双轴变位机原理相近,但是第二轴的上端与夹具固定,采用回转支撑与电机驱动端同步。C 型双轴变位机的第一轴减速比大,就结构来说,其承载能力要比L 型双轴变位机的承载能力大很多,一般焊接重型夹具选用。

图6 C 型双轴变位机
1.7 三轴垂直翻转变位机
其结构形式见图7。此变位机第一轴的翻转实现夹具A/B 侧的换位,第二轴/第三轴的自身翻转实现夹具自动翻转。此变位机实现了与机器人的同步协调动作,驱动均采用伺服电机,两套同样的夹具一起工作,A 侧机器人焊接的同时,B 侧是人工装件。此变位机对于整个工作站来说,工作效率大大提高。
选用三轴垂直翻转变位机的机器人焊接工作站较大,工作站的安全房较高,一般用于车桥等大型工件的焊接。跨距较小的夹具可用单机实现焊接,对于跨距较大的夹具,一个机器人无法完全满足焊接时,可选用双机同时焊接,以满足工件的焊缝要求。

图7 三轴垂直翻转变位机
1.8 三轴水平回转变位机
其结构形式见图8。此变位机是三轴变位机的不同类型的设备,工作原理与三轴垂直翻转变位机基本相同,但是,第一轴要通过回转实现夹具A/B侧的换位,第二轴/第三轴依然是通过自身翻转实现夹具自动翻转。此变位机实现了与机器人的同步协调,驱动均采用伺服电机,两套同样的夹具一起工作,A 侧机器人焊接的同时,B 侧是人工装件。
三轴水平回转变位机工作站的安全房比三轴垂直翻转变位机稍低。此类变位机整台设备半径较大,一般采用单机焊接。

图8 三轴水平回转变位机
1.9 五轴变位机
其结构形式见图9。此变位机分A/B 工位,两侧的工作原理相同,可实现夹具的回转和翻转。第一轴的翻转实现夹具自身回转,第二轴实现夹具自动翻转,第三轴实现变位机A/B 工位的位置变换;通过各个轴的协调,达到更佳的工件焊接效果。
五轴驱动均采用伺服电机,两套同样的夹具一起工作,A 侧机器人焊接的同时,B 侧是人工装件。此变位机对于整个工作站来说,工作效率大大提高。

图9 五轴变位机
2 变位机的主要技术性能
变位机是专用焊接辅助设备,主要任务是将负载(焊接工夹具+焊件)按预编的程序进行回转和翻转,使工件接缝的位置始终处于最佳焊接状态。焊接变位机能将焊枪准确送到待焊位置,并保持该位置或以选定焊速沿设定轨迹移动焊枪。通过工作台的升降、翻转和回转,固定在工作台上的工件可以达到所需的焊接装配角度。
工作台回转为变频无级调速,可达到满意的焊接速度。为达到这一目的,焊接变位机必须具备以下主要技术性能:
1)应输出足够大的转矩,带动所标定的负载,做平稳的运动。
2)负载转动惯量要小于电机减速机额定输出转动惯量,以保证平稳启动。
3)应设置导电性能良好的焊接回路,保证焊接电源的输出低损耗地传送,使焊接电流持续稳定,并能达到最大额定值。
4)设有自动控制接口,包括气动焊接工夹具I/O 接口,易于与机器人控制系统集成,可按指令与机器人联动。
5)具有精确的复零位功能。
6)设有安全联锁装置,保证操作人员和设备的绝对安全。
3 变位机的标准化
变位机的标准化是指在变位机的设计中引入模块化的概念,按照各组成部分的功能和结构把变位机拆分成:驱动单元、从动单元、旋转机架、底座、副基座、首箱、尾箱等模块,每个模块有统一的安装尺寸,但是每个模块有不同的结构尺寸,这样经过组合,设计出多种类型,满足多种焊接夹具的需要,适应更广泛的机器人焊接工作站。
标准化工作完成后,不但为企业节约大量的人力物力,而且提高了工作效率,很大程度上缩短了焊接变位机的供货周期。
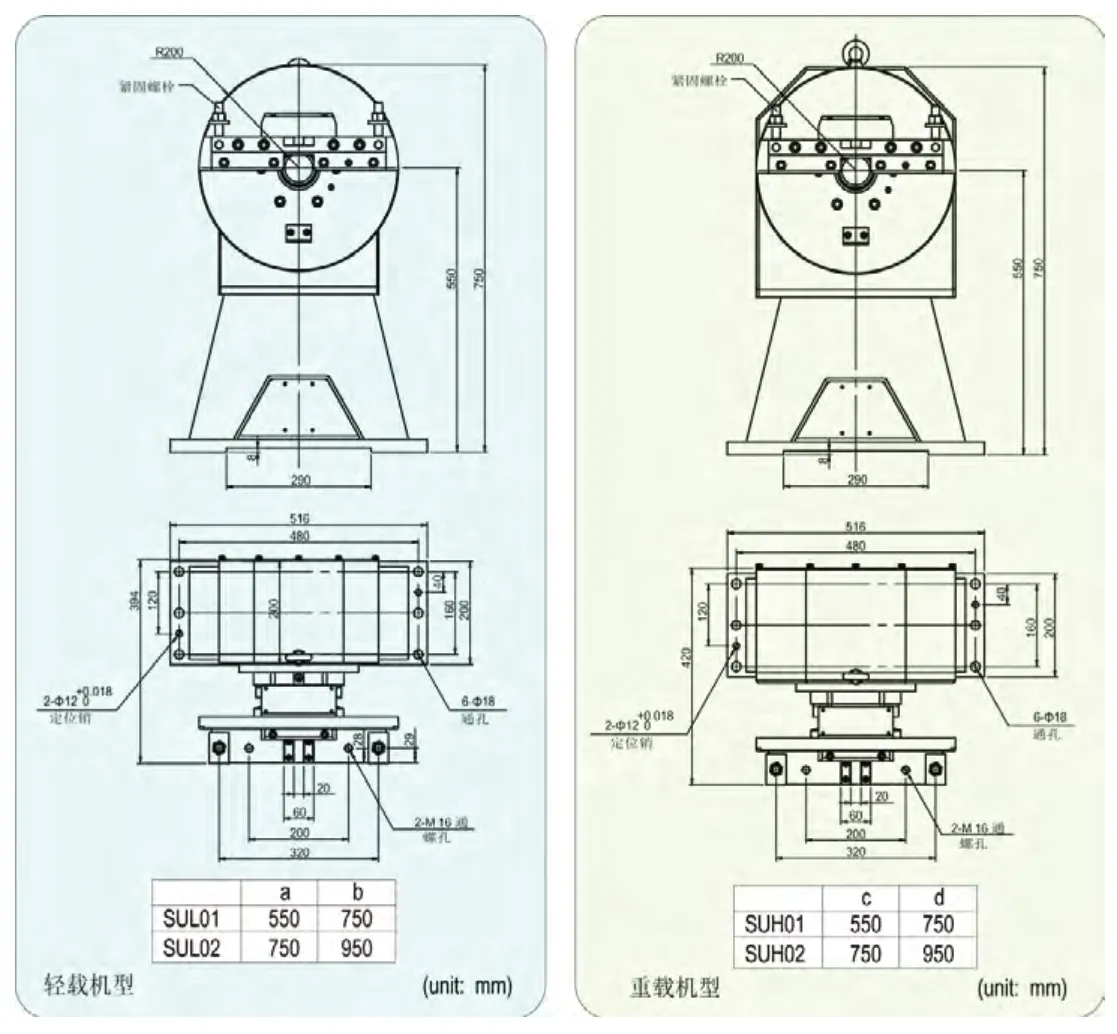
图11 从动单元结构尺寸图
3.1 驱动单元
这是焊接变位机中基本的模块之一,主要由电机、减速机、夹具连接盘、焊接座等组成。安川首钢机器人有限公司的标准驱动单元有两种高度,驱动模块中DUL01 高度550cm,DUL02 高度750cm,以满足不同夹具回转半径的需要。驱动单元中亦有轻载与重载之分,轻载所选电机功率1.3kW, 重载所选电机功率3.7kW。此驱动单元的基本参数如表1 所示,结构尺寸如图10 所示。

表1 驱动单元基本参数

图10 驱动单元结构尺寸图

表2 从动单元基本参数
3.2 从动单元
此模块也是焊接变位机中基本的模块之一,主要是由夹具连接盘、焊接座等组成。安川首钢机器人有限公司的标准从动单元有两种高度,从 动 模 块 中SUL01 高 度550cm,SUL02 高 度750cm,以满足不同夹具回转半径的需要。从动单元中亦有轻载与重载之分,轻载为SUL,重载为SUH。此从动单元的基本参数如表2 所示,结构尺寸如图11 所示。
3.3 单轴变位机
单轴变位机是由模块驱动单元、从动单元、底座、副基座共同组成,如图12 可以看出,底座有两种类型,从而组合成不同规格的单轴变位机:I 型单轴变位机和U 型单轴变位机。单轴变位机适合焊接夹具跨距为1600mm、2000mm、2500mm、3000mm、3500mm 等。同理,副基座的高度不同,可组合成不同高度的变位机,以满足不同半径焊接夹具的需要。

图12 单轴变位机结构图
3.4 双轴变位机
双 轴 变位机有两种类型,每一类都是相对独立的整体变位机。此变位机有两种负载,轻载双轴变位机的负载为300kg,型 号MA2P-300D; 重载双轴变位机的负载为500kg,型 号MA2P-500D。双轴变位机的具体性能参数如表3所示,结构尺寸如图13 所示。

表3 双轴变位机性能参数

图13 双轴变位机结构尺寸图
3.5 三轴垂直翻转变位机
三轴垂直翻转变位机是由模块驱动单元、从动单元、旋转机架、首箱、尾箱、底座共同组成,适合焊接夹具半径为600mm 和800mm,跨距为1600mm、2000mm、2500mm、3000mm、3500mm 等,有重载和轻载两大类。三轴垂直翻转变位机的具体性能参数如表4 所示。

表4 三轴垂直翻转变位机性能参数
3.6 三轴水平回转变位机
三轴水平回转变位机是由模块驱动单元、从动单元、梁、底座共同组成,适合焊接夹具半径为600mm 和800mm,跨距为1600mm、2000mm、2500mm 等。三轴水平回转变位机的具体性能参数如表5 所示。

表5 三轴水平回转变位机性能参数
4 结束语
现代机器人焊接变位机是机器人工作站高效、优质焊接生产不可缺少的组成部分,其重要性已得到广泛认同。变位机的标准化很大程度上缩短了焊接变位机的生产周期,使机器人工作站系统更加优化,对提升整个机器人焊接工作站的效率功不可没,同时,亦可以令企业为广大客户提供更加优质、快捷的服务。因此,进一步深入开展焊接变位机的技术研究,使其设计标准化势在必行。
猜你喜欢
矿产勘查(2020年2期)2020-12-28
工程与建设(2019年1期)2019-09-03
电子测试(2017年12期)2017-12-18
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
现代交际(2017年19期)2017-10-23
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
照明工程学报(2016年3期)2016-06-01
焊接(2015年9期)2015-07-18
云南畜牧兽医(2015年4期)2015-02-28
