
实时背景噪声补偿的激光雷达能见度仪设计
2014-04-19 09:18蒋立辉
激光与红外 2014年4期
蒋立辉,黄 炜,冯 帅
(1.中国民航大学天津市智能信号与图像处理重点实验室,天津 300300; 2.中国民航大学工程技术训练中心,天津 300300)
实时背景噪声补偿的激光雷达能见度仪设计
蒋立辉1,黄 炜1,冯 帅2
(1.中国民航大学天津市智能信号与图像处理重点实验室,天津 300300; 2.中国民航大学工程技术训练中心,天津 300300)
基于实时背景噪声补偿的方法,设计了一台激光雷达能见度仪。该系统采用了模块化的设计思想,以嵌入式计算机PCM-3370作为系统的控制和数据处理单元,通过门控电路控制系统各模块的工作时序。针对强背景光照条件下信噪比恶化的实际情况,采用了一种新的实时背景噪声补偿与采用阈值分割的移动平均法相结合的方法处理信号,大幅度地提高了信噪比。最后通过数值仿真和外场对比试验,验证了本设计的准确性和有效性。
激光雷达;实时背景噪声补偿;阈值分割;移动平均法
1 引 言
随着我国低空空域的逐渐开放,通用航空领域已进入一个迅猛发展的阶段。其中,能见度的判断直接影响着机场和民航客机的安全,能见度仪的设计研发有着很高的实际应用价值。激光雷达能见度仪是继透射式、前向散射式之后的一种新型后向散射式能见度观测工具,具有高探测灵敏度和空间分辨率等显著的优点。激光雷达能见度系统在白天工作时,易受到背景噪声的影响,该背景噪声主要来自于太阳和天空的光辐射,且随地点、时间和天气状况不同而变化,有效抑制背景噪声能够大幅度地提高能见度仪的测量范围和精度。以往的激光雷达能见度仪,通常采用恒定背景噪声补偿的方法来处理回波信号,即选定最大探测范围附近的一点,近似认为该距离采样点上接收到的回波强度为所有距离采样点上的背景噪声强度。但是由于自然或人为等因素,在探测时间内背景噪声的强度存在着变化,这种近似的估计往往存在着误差。
本文基于后向散射的原理,进行了激光雷达能见度仪的设计。在系统结构上,采取了模块化的设计思路,使整个能见度系统非常小巧、便携。在系统控制和数据处理上,采用嵌入式计算机PCM-3370作为数据处理单元,既满足了数据处理性能的要求,同时通过其集成的有线网口又实现了仪器的远程控制。此外,又针对滤光片带宽不足以有效滤除强背景光的实际情况,采取了实时背景噪声补偿的方法,有效抑制了白天强光条件下的背景噪声。结合采用阈值分割的移动平均法处理补偿后信号,提高了后续的能见度反演精度,显著增强了激光雷达能见度系统的探测性能。
2 工作原理及系统结构
本设计在系统结构上可以划分为光学发射系统、光学接收系统和数据采集与处理系统三部分,其工作时序由门控电路控制。
本激光雷达能见度系统采用了模块化的设计思路,使系统结构更加紧凑,满足了便携式的要求,其结构框图如图1所示,主要技术参数由表1所示。灵活小巧的接收/发射望远镜和各工作模块全部封装于210 mm×170 mm×140 mm的铝结构便携箱体中。

图1 激光雷达能见度系统结构框图
2.1 光学发射系统
光学发射系统包括激光器、光束耦合器和发射望远镜三部分。
激光器采用脉冲激光二极管模块,该激光器具有低脉冲能量和高脉冲重复频率的特点,既满足了人眼安全的标准,又能保证单位时间脉冲积累的数目,提供了足够的平均发射功率。光学耦合器是将激光器发射的激光束转换为光纤中的光波的器件,用来聚焦和准直激光的发射光束,降低激光发射过程中的能量损耗。发射望远镜将激光汇聚成平行光束发射至探测空间,发射望远镜自外向内由平镜和两个透镜组成,后端连接至光纤。

表1 激光雷达系统参数
2.2 光学接收系统
光学接收系统由接收望远镜和窄带滤光片构成。
接收望远镜由一组组合透镜构成,接收与大气相互作用后散射回的激光雷达回波信号。窄带滤光片位于透镜组的最前端,以滤除工作波长带外的背景光和杂散光。之后是平镜和两个透镜的组合,最后回波信号被汇聚到接收光纤,输送到光电探测器。
2.3 数据采集与处理系统
针对激光雷达回波信号相对微弱的特点,此处选用低噪声、高量子效率,可实现单光子探测的雪崩光电二极管探测器,实现光信号至电信号的转换。
采集数据是光子计数卡完成的,此处选用的为MCS-pci,其具有多通道、高采集速率的特点,从而保证了对光电探测器输出的有效采集。
数据的存储和处理由嵌入式计算机完成,考虑到整个激光雷达系统的便携性和数据处理性能要求,选用了PCM-3370E作为数据的处理单元,其集成的有线网口还可以实现仪器的远程控制,可以实现多种测量设备的组网和统一控制。
2.4 工作时序控制
激光雷达能见度系统通过门控电路产生触发信号,控制着整个系统的工作时序。
触发信号分别触发激光器、光电探测器和数据采集卡。当接收到触发信号时,接收触发的器件开始工作,否则停止工作。
3 系统校准和数据处理
3.1 系统校准
本文设计的激光雷达系统采用离轴模式且收发分离。在采集数据之前应对系统进行校准,保证光路的准直性,以满足回波信号能被顺利的接收,到达光电探测器的光敏面;尽可能的汇聚发射激光光束,减小发射激光发散角,增加在大气中的探测距离。此外,还需进行几何重叠因子和收发同步的校准。
3.1.1 几何重叠因子校准
本激光雷达能见度系统工作在离轴模式下,激光发射系统和激光接收系统的光轴平行,发射视场与接收视场之间由完全分离逐渐过渡到部分重合直至完全重合,从而引入了几何重叠因子的概念。这样的光学系统结构使得系统存在探测的盲区,近场回波信号只能部分的被接收,从而导致能见度的反演结果产生较大的误差,故必须进行系统几何重叠因子的校准。几何重叠因子可以由系统参数计算得到,但一般实际值与理论值偏差较大,通常选择实验法在天气晴朗、自然对流占主要地位的夜晚测得。
激光雷达接收到距离r处的回波信号功率P (r)可以由激光雷达方程确定:

式中,P(r)是探测距离r处的大气散射回波信号能量;E0是发射的激光脉冲能量;c是光速;Ar是接收望远镜有效接收面积;Tsys是系统的总透过率。
激光束在晴朗大气条件下水平传播时,大气近似均匀分布,此时的大气消光系数σ(r)、后向散射系数β(r)均可视为常数。由式(2)可得系统的几何重叠因子Y(r)为:

式中,A=E0cArTsys/2为激光雷达系统常数。
3.1.2 收发同步校准
数据采集卡设置的单通道采集时间为100 ns,由于激光器的启动存在响应时间,激光束的发射大约滞后触发信号100 ns,为实现系统的收发同步,故去掉第一个采样值,从第二个采样值开始采集。
3.2 数据处理
3.2.1 实时背景噪声补偿
由于本系统采用的滤光片带宽为10 nm,在白天强光照条件下进行探测会有大量背景光进入激光雷达系统,造成接收信号的严重恶化。而且背景噪声的随机性很大,随地点、时间和天气状况不同,其变化与多种因素有关,往往不是一个常数,为了更精确的测量,本文设计的激光雷达能见度系统引入了一种实时的背景补偿方式,对含噪声的回波信号进行处理。
本设计中,激光器、光电探测器和数据采集卡受门控电路产生的触发信号控制,最终实现对系统工作时序的控制。首先,通过触发信号控制,在激光器发射一次脉冲信号时间内,数据采集卡在每个探测距离采样点上分别采集一次夹杂背景噪声的回波和一次纯背景噪声回波。然后,以此循环测量累加,并以向后平均的方式来进行数据处理。最后,获得剔除背景噪声后的回波信号,达到提高信噪比的目的。
在硬件实现上,通过门控电路发送触发信号控制激光器和数据采集卡的门电路,采用接通或切断的方式,产生交替的“信号+噪声”和“噪声”的计数,并输入到同步计数系统。此时,光电探测器一直设置工作在“接通”状态。在一个脉冲周期内具体过程为:
(1)当激光器的门电路处于“接通”状态,数据采集卡的门电路也处于“接通”状态时,来自放大器-鉴别器的是信号和噪声之和,数据采集卡的计数结果记为aij,i为采样点编号,取值为1~N,N为每个距离采样点上进行采样的次数;j为距离采样点编号,取值为1~134,分别对应15 m~2 km的探测距离。
(2)当激光器的门电路处于“切断”状态,数据采集卡的门电路处于“接通”状态时,此时光电倍增管的所有输出脉冲都是背景噪声,数据采集卡的计数结果记为bij;


如图2所示为系统工作时序情况。在一个激光脉冲时间内,激光器响应滞后触发信号100 ns。当提取“信号+噪声”时,激光器开启,数据采集卡同步开启接收回波;当提取“噪声”时,激光器处于关闭状态,数据采集卡开启采集数据,且与第一次采集时间相同。
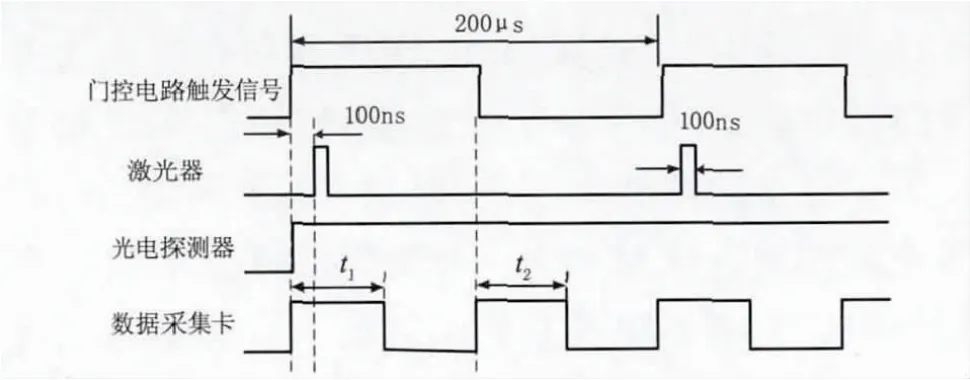
图2 系统工作时序图
需要特别指出的是,为了准确地进行上述的测量,必须对激光器和数据采集卡的门电路设置合理的选通时间,对数据采集卡的触发脉冲宽度加以仔细调整,使数据采集卡在一个激光脉冲时间内的两次选通脉冲宽度相同,如图2所示,即t1=t2。在实际工程应用中,数据采集卡的触发信号频率设置为门控电路触发信号的倍频即可。
3.2.2 移动平均法
针对实时背景噪声补偿处理过的回波信号(尤其是弱信噪比部分)仍然存在较多“毛刺”,易造成后续能见度反演计算不准确的实际问题,在数据处理上对补偿后的回波信号采用了移动平均法来进行平滑,提高能见度的反演精度。
对于实际的信号,其强信噪比部分经过补偿处理后仍具有强信噪比,只存在很少的“毛刺”,对其进行平滑处理会使每个距离采样点与邻近点进行平均,改变了实际接收的数值,反而会增加信号的误差;而对于弱信噪比部分,对其进行移动平均法处理能大幅度消除背景补偿后存在的“毛刺”,提高后续反演精度。具体做法为,设置一个阈值分割信号,在强信噪比部分保留原回波信号,在弱信噪比部分进行移动平均处理。
设移动平均处理后距离采样点上的回波信号为C'(j),弱信噪比回波的首个采样点编号为j',则移动平均法处理后为:

如此进行多次移动平均处理,最终得到处理后的回波信号。
4 数值仿真及外场试验
4.1 数值仿真
首先设置一组高斯噪声序列,验证对采样点以向后平均的方式处理能够准确的反应噪声的实时强度,进而验证本文所采用的实时背景补偿法的合理性和有效性。此处,设置一组均值μ=3,方差σ2=2,序列长度N=500的高斯噪声序列来模拟在某个距离采样点上采集的500个采样值。如图3所示,采集到的噪声序列围绕噪声均值上下无规律波动。

图3 序列长度N=500的高斯噪声序列
在采集到的噪声序列中,随着采集到点数的增加,对采样点进行向后平均。设采样点为si,i为采样点编号,则向后平均值s表示为:

此处,n为参与向后平均的点数。
图4所示为向后平均值s随向后平均采样点数增加的变化情况。由图4(a)可见,随着采样点数的增加,向后平均值s逐渐趋近噪声序列的预设均值,即满足收敛特性,且收敛于噪声序列的均值。图4(b)为随着采样点数增加,向后平均值的误差情况,可知向后平均点数n≥300以后,误差小于0.3%,表明该向后平均值能够准确反映实际噪声序列的强度。

图4 向后平均值及误差随采样点增加的变化情况
需要特别指出的是,由于实际情况下噪声序列的均值和方差的差异,为了能更准确反映噪声序列强度,进行的向后平均所需的采样点数会有所不同。
4.2 外场试验
对本系统在实际外场条件下进行仿真测试,仿真结果如图5所示。
图5(a)为白天强光照条件下,未进行实时背景噪声补偿的原始回波信号。可以看到,系统的滤光片由于带宽的原因不能有效滤除工作波长外的背景噪声,回波信号淹没在背景噪声中,且回波信号存在较强的近场噪声。首先利用距离选通的方法滤除近场噪声,然后采用实时背景噪声补偿的方法处理回波信号,有效的抑制了噪声,回波信号得到明显的提取,极大地提高了信号的信噪比。
在实时背景补偿法获得的回波信号基础上,采用移动平均法进一步平滑处理回波信号,仿真结果如图6所示。图中虚线部分为移动平均法处理前的回波信号,实线为移动平均法处理之后的回波信号,可以看到,回波信号得到明显平滑,增加了后续能见度反演计算的准确性。

图5 实时背景补偿前后回波信号

图6 采用移动平均法平滑处理后的回波信号
激光雷达能见度仪全天测量数据如图7所示,图中横坐标标识了探测的具体时刻,纵坐标表示该时刻的能见度。
从图7中可以看出,当日的上午10点左右能见度为1.8 km,能见度情况不佳,有轻雾;10点之后雾气消散,能见度情况略微好转,能见度在2.1 km左右波动。将本次外场测量结果及之后的大量试验数据与美国Belford前向散射式能见度仪进行对比实验,相对测量误差总体集中在20%以内,这表明本激光雷达能见度系统具有较好的全天候工作性能,同时具有较高的准确性。

图7 能见度系统全天测量结果
5 结束语
本文设计的激光雷达能见度仪结构紧凑,便于携带进行外场测量,特别是进行斜程能见度的探测不需要合作目标,充分满足了机场的应用需求。经过全天候外场对比实验,表明本激光雷达能见度系统总体达到了设计要求,具有较高的测量精度,有良好的实际应用价值。
[1]FENG Shuai,JIANG Lihui,XIONG Xinglong,et al.Backward scattering lidar for visibility detection[J].Laser&Infrared,2009,39(12):1283-1287.(in Chinese)
冯帅,蒋立辉,熊兴隆,等.后向散射式激光雷达能见度探测研究[J].激光与红外,2009,39(12):1283-1287.
[2]GAO Jinzhan.Detection of weak signals[M].Beijing:Tsinghua University Press,2004.(in Chinese)
高晋占.微弱信号检测[M].北京:清华大学出版社,2004.
[3]Yuekui Yang,AlexanderMarshak,Stephen PPalm,etal.Cloud impact on surface altimetry from a spaceborne 532-nm micropulse photon-counting lidar:system modeling for cloudy and clearatmospheres[J].IEEE Transaction on Geoscience and Remote Sensing,2011,49(12): 4910-4919.
[4]Chidong Xu,Yufeng Ji.Research and application ofMPL_ A1/T micro pulse lidar[J].Research of Environmental Sciences,2008,3(5):337-343.
Design of laser visibility meter based on real-time background com pensation
JIANG Li-hui1,HUANGWei1,FENG Shuai2
(1.Tianjin Key Laboratory for Advanced Signal Processing,Civil Aviation University of China,Tianjin 300300,China; 2.Engineering Techniques Training Center,Civil Aviation University of China,Tianjin 300300,China)
Based on themethod of real-time background noise compensation,a lidar for visibilitymeasurement,named as laser visibilitymeter is designed.The system adopts amodular design concept,and takes the embedded computer PCM-3370 as the control and data processing core.To deal with the signal-to-noise ratio degrading under the strong background light,a new method that combines the real-time background noise compensation with the moving average method using threshold segmentation is adopted to process the signal,which greatly improves the signal-to-noise ratio. Finally,the accuracy and effectiveness of the design is verified by numerical simulation and field tests.
lidar;real-time background compensation;threshold segmentation;moving average
TN958.98
A
10.3969/j.issn.1001-5078.2014.04.011
1001-5078(2014)04-0399-06
蒋立辉(1964-),男,教授,主要研究方向为光电子技术及其在航空气象探测中的应用。
2013-07-10;
2013-08-07
猜你喜欢
噪声与振动控制(2022年3期)2022-07-04
中国测试(2022年2期)2022-03-19
制造技术与机床(2017年8期)2017-11-27
地震研究(2017年3期)2017-11-06
网络安全与数据管理(2016年4期)2017-01-10
中国交通信息化(2016年6期)2016-06-06
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27
电子器件(2015年5期)2015-12-29
