模糊滑模控制在永磁同步电机中的应用
2014-04-19 02:47马新
赤峰学院学报·自然科学版 2014年4期
马新
(淮南师范学院 数学与计算科学系,安徽 淮南 232038)
模糊滑模控制在永磁同步电机中的应用
马新
(淮南师范学院 数学与计算科学系,安徽 淮南 232038)
本文结合终端滑模控制和模糊控制两种非线性控制方法,提出了一类永磁同步电动机的模糊滑模控制方法.为了实现永磁同步电动机伺服系统快速而准确的位置跟踪控制,在控制器设计中,利用中继切换控制使系统在给定的当前控制律的作用下运行到某一特定状态(或某一特定区域)后,再在滑模控制策略中引入模糊控制算法,进而设计了一种基于模糊滑模控制的非线性电机转速控制器.仿真结果显示,模糊滑模控制较好地解决了抖振问题,有效地实现了电机的转速跟踪,具有良好的动、静态特性和鲁棒性.
模糊控制;永磁同步电动机;滑模控制;模糊规则
永磁同步电机(PMSM)以其优异的性能而被广泛的应用于高精度位置控制的伺服系统,但是,由于受内部参数未知时变、速度和电流的非线性耦合以及外部未建模动态的影响,PMSM的伺服控制变成一个复杂的问题[2].传统的控制方法已经不能满足PMSM的高性能控制,随着现代控制理论的发展,一些先进的控制方法已经逐步应用到电机控制系统中,如文献[3]中采用模糊PID控制方法实现对转速无差控制的目的,文献[4]中用改进的PR控制器替代传统的PI控制器,实现对交流输入信号的无静差跟踪;文献[5]中提出了基于模型预测控制的电流控制策略,有效地改善矢量控制的动态响应,并具有较强的鲁棒性;此外,还有无源性控制[6]方法、滑模变结构控制[6-11]方法等等,本文将模糊控制和滑模控制相结合,既实现了跟踪误差在有限时间内收敛到零,又有效地减弱滑模控制中的抖震现象,通过仿真验证了控制方法的有效性.
1 系统描述
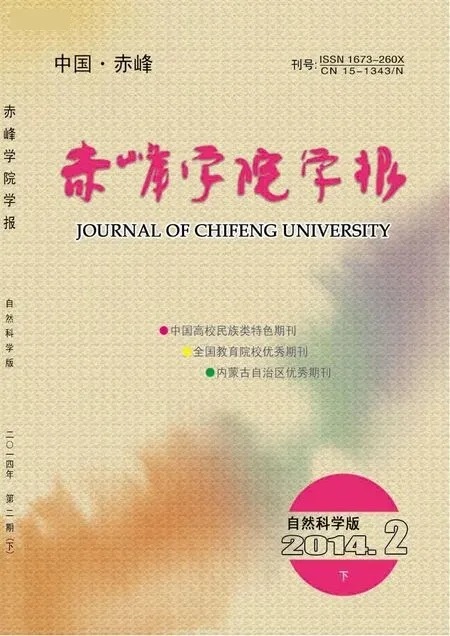
以定子d、q轴电流id,iq和转子角速度ω为状态变量,永磁同步电动机的数学模型[11]可表示为
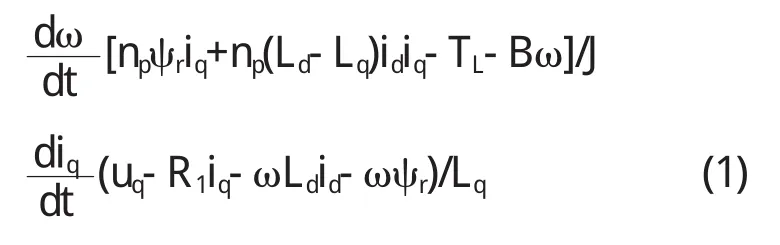
其中R1为定子绕组电阻;Ld,Lq分别为定子d、q轴电感;ψr为转子磁极磁链;ω为转子角速度;TL,J,B分别为负载转矩,转动惯量和粘滞阻尼系数;np为电机极对数;ud,uq分别为定子d、q轴电压;分别表示转子角速度和加速度.
2 控制器设计
首先,由于系统采用i*d的定向控制技术,所以定义


其中β>0为一设计参数.由系统(1)的最后一个方程得

根据模糊滑模控制原理,控制器由等效控制ueq和切换控制usw两部分组成[12],即:u=ueq+ρNZusw,其中ρNZ为模糊控制器的输出.当到达滑模面时,ρNZ=0,当ρNZ=1时,即常规滑模控制.
2.1 等效控制部分设计
定义跟踪误差为e2=ω-ω*,则有

假定iq为虚拟控制函数,取

定义


对式(7)求导,则有
四是水工程安全,即在江河、湖泊和地下水源开发、利用、控制、调配和保护水资源各类工程的安全,包括防洪、灌溉、供水、发电、防洪、发电、水土保持、水资源保护等工程的合理建设与良性运行等。

对式(8)求导,有


由此可以解出定子电压交轴分量的等效控制部分uq-eq:

2.2 切换控制部分设计
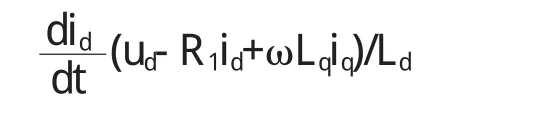
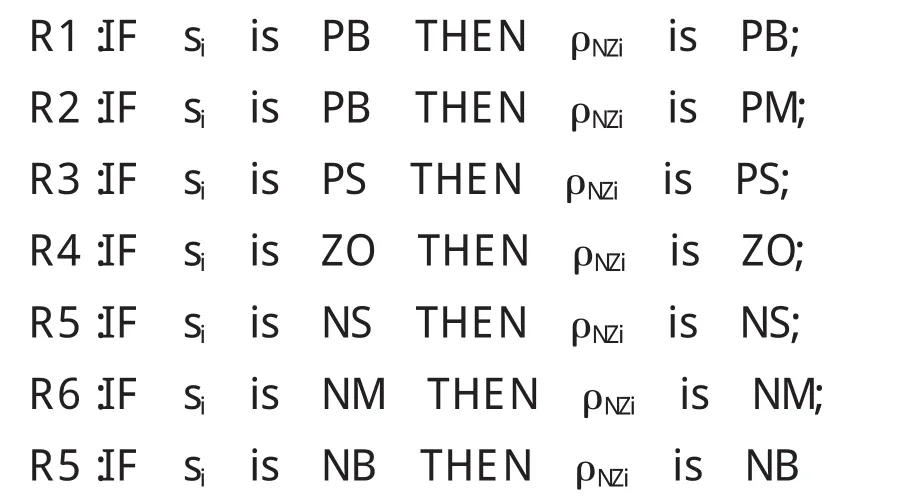
切换控制部分由两部分组成:切换系数、切换函数,即:usw=sgn(si)(i=2,3).滑模平面定义为:si=ciei+i (i=2,3),根据si的实际值,以及基于“专家”的推理规则获得ρNZi,设计如下模糊系统:si为输入,ρNZi为输出,系统输入输出的模糊集定义如下[13]:si={Nb NM NS ZO PS PM PB},ρNZi={Nb NM NS ZO PS PM PB},其中:NB-负大;NM-负中;NS-负小;ZO-零; PS-正小;PM-正中;PB-正大.模糊系统的输入输出隶属函数如图1所示:
图1 输入输出隶属函数
选择如下模糊规则:
控制系统的结构图如图所示:

图2 控制系统总体框图
3 仿真研究
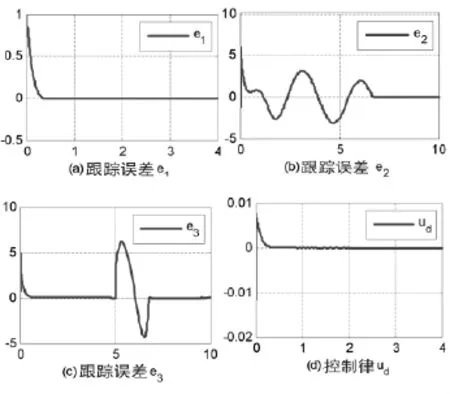
图3 跟踪误差和控制律随时间的变化曲线
仿真图像如图3所示.其中图(a)和(b)、(c)为跟踪误差,(d)为控制律随时间的变化曲线..由图(a)可知跟踪误差e1在大约0.4秒时收敛到零,由图(b)可知跟踪误差e2在大约6.5秒时收敛到零表明通过调节定子的电压ud和uq,使得实际转子的速度ω在有限时间(6.5秒)以后可以实现对理想转子速度ω*的完全跟踪.由图(c)表明跟踪误差e3在大约7秒时间内收敛到零,图(d)表明控制律ud在t=0.4秒时达到零并永远保持为零.可见,基于模糊规则的滑模控制已经解决滑模变结构控制的抖振问题.
4 结束语
本文将模糊滑模控制方法应用于PMSM系统,仿真结果显示,模糊滑模控制较好地解决了抖振问题,有效地实现了系统状态在有限时间内达到完全跟踪的目的,具有良好的动、静态特性和鲁棒性,充分证明了该控制策略的有效性.
〔1〕徐衍亮,唐任远.永磁同步电动机驱动的电动汽车仿真研究[J].系统仿真学报,2004,16(4).
〔2〕Hemati N,Leu M i.A Complete Model Characterization of Brushless DC M oto[J].IEEE Trans. on Indus.Appl.,1992,28(1).
〔3〕王泽,李泽滔,张佳荣,等.永磁同步电机模糊PID控制器的研究[J].机械与电子,2012(8).
〔4〕罗德荣,陈自强,黄守道,等.PR控制器在永磁同步电机控制中的应用[J].湖南大学学报,2013,40 (3).
〔5〕何栋炜,彭侠夫,蒋学程.永磁同步电机模型预测控制电流控制策略 [J].哈尔滨工程大学学报,2013(10).
〔6〕候利民,张化光,等.自适应模糊滑模软切换的PMSM无速度传感器鲁棒无源控制[J].控制欲决策,2010,25(5).
〔7〕WU Y Q,YU X Y,Man Z H.Terminal Sliding Mode Control Design for Uncertain Dynam ic Systems[J].Systems&Control Letters, 1998,34(5).
〔8〕冯勇,鲍晟,余星火.非奇异终端滑模控制系统的设计方法[J].控制与决策,2002,17(2).
〔9〕WU Y Q,ZONG G D.Relay Sw itching Controller w ith Finite Time Tracking for Rigid Robotic M anipulators[J].Acta Automatic Sinica, 2005,31(3).
〔10〕马新,宗广灯,武玉强.永磁同步电动机的有限时间跟踪控制[J].电机与控制学报,2006,10(5).
〔11〕马新,平静水.终端滑模控制器设计在永磁同步电动机中的应用[J].通化师范学院学报,2011,32 (10).
〔12〕Farzan Rashidi, Mehran Rashidi, Robust Sliding Mode Speed Control w ith Fuzzy Approach for Induction M otors[C].M aribor, Slovenia:ICIT,2003:27-30.
〔13〕李渊,何凤有,等.永磁同步电机模糊控制系统的研究[J]. 微电机,2010,28(4).
O231.2;TM35
A
1673-260X(2014)02-0045-03
安徽省高校省级自然科学研究项目(KJ2012Z373)
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28