
基于智能相机控制的横摆式株间机械除草系统设计
2014-04-15 03:43:16胡炼林潮兴杨伟伟许奕
湖南工业职业技术学院学报 2014年4期
胡炼,林潮兴,杨伟伟,许奕
(华南农业大学,广东广州,510642)
1 引言
农田草害一直是阻碍农业生产快速、持续发展的一个重要因素。虽然我国农田杂草综合治理已经取得了长足进步,但杂草危害、演替、抗药性、除草剂药害等问题仍相当严重[1]。而机械除草避免了农药所带来的环境污染,同时可以使土壤更加松散,增加植物的根部供氧,便于作物生长。目前机械除草的方法主要针对行间位置的杂草去除,对于行内杂草很难有效去除[2]。为了对株间杂草进行控制,国外对智能化株间除草机械进行了一些相关研究[3~7];目前国内也开始了对智能化株间机械除草技术与机具的研究[8~12],但仍处于初步阶段,仍需开展深入研究。
本文设计了一种基于智能相机控制的横摆式株间机械除草系统,分析了横摆式株间除草的工作原理,设计了基于机器视觉的横摆式株间机械除草控制系统,并进行了试验研究,为株间机械除草装置的进一步优化和精准控制提供了依据。
2 系统设计
2.1 横摆式株间除草原理
横摆式株间机械除草原理如图1所示,通过高速旋转的割刀割断杂草,横向运动和前进速度实现旋转割刀进出株间区域从而避让作物。除草系统识别出作物相对于割刀坐标,当接近作物时控制割刀移出作物株间区域,避让防止割刀损伤作物,在不伤害作物的前提下,尽快控制割刀回到作物株间区域,以最大限度地割除株间区域杂草。

图1 横摆式株间除草原理
2.2 横摆式株间机械除草系统
(1)系统组成
横摆式株间机械除草系统组成如图2所示,智能相机用于获取田间环境信息(包括作物和杂草)并进行作物识别和定位运算,智能相机通过I/O端口同时采集前进速度、横摆位移和割刀转速等信息,通过I/O控制、电机驱动模块驱动并控制割刀旋转和割刀横向运动。
智能相机采用National Instruments的NI1774C,分辨率为1280x960(SXGA),帧速率为17 fps,配置功能强大的IntelAtom 1.6GHz处理器,适用于自动化检测应用。坚固的机械设计包含了IP67外壳、M12连接器以及透镜盖,可防止水(1米防水)和灰尘进入损坏相机,还配有数字I/O线(4条输入4条输出)、一个RS232串行连接和千兆以太网连接,可动态地控制照明、同步传送带和驱动排序机制。此外,连接选项支持Modbus、以太网I/P和TCPI/P等通信协议,可实现与可编程逻辑控制器(PLC)、可编程自动化控制器(PAC)和人机界面(HMIS)等其他工业设备相连接。
前进速度检测和横摆位移测量均采非接触式步进编码器(型号:EMS22D,BOURNS),分别测量测量地轮仿形转动速度和横摆电机转动角度。该编码器尺寸小,采用磁感应测量原理,3.3~5V直流供电,每圈分为512步进。2个编码器通过智能相机I/O连接器上的接口连接至智能相机。电机驱动采用双H桥驱动模块,同时驱动控制横摆电机和割刀电机。计算机并不是横摆式株间机械除草系统必要组成模块,主要用于编写Labview程序和设置为前面板实时显示智能相机的相关处理结果。

图2 控制系统组成
(2)横摆运动控制方法
横摆运动是实现株间区域杂草控制和避免损伤作物的关键,横摆运动控制方法如图3所示,根据已知作物位置和尺寸,结合当前进前速度,规划出横摆移出株间区域的控制起点和横摆运动速度,当旋转割刀经过作物中心后通过横摆运动控制割刀移入株间区域。作物位置和尺寸由智能相机运算算法获得,即作物中心坐标和表征作物尺寸的圆直径D,为不损伤作物,控制起点确定方法如下:
①通过智能相机信息获得目标作物圆直径D,单位mm;
②通过地轮传感器测量得到实时前进速度Vf,单位m/s;
③计算出不损伤作物的避苗时间,单位s

式中,d为旋转割刀直径,单位mm。
④为保证避苗时间准确,根据式2选择合适的横
摆控制PWM占空比,

式中,Δt为测量偏差,单位s。
⑤计算出横摆移出株间区域的控制起点df,单位mm。


图3 控制示意图
(3)基于Labview的作物识别与控制
机械除草的保护目标是作物,因此只需识别作物而无需区分杂草和土壤。本研究采用的基于机器视觉的作物识别的前提是认为作物垂直投影面积大于杂草垂直投影面积,识别的主要过程包括对获取的图像灰度化,对灰度化图像进行滤波后二值化,然后腐蚀与膨胀并对图像中的连通域进行标记,最后根据连通域的特征进行滤波,计算出连通域的质心与作物的外形尺寸等。前进速度检测和横摆位移测量的非接触式步进编码器信号采用扫描方式读取,100ms读取一次。旋转割刀电机由1个I/O接口控制其启动与停止;横摆电机由3个I/O接口控制,2个接口用于电机正反转控制,1个接口生成不占空比PWM信号。
3 试验与分析
(1)PWM 占空比与横摆运动周期的关系
在确定控制起点后,避让作物的关键在于控制横摆运动速度,以保证避让作物的时间和最大限度地扩大株间区域的割草面积。试验选取不同横摆电机控制PWM占空比,建立不同PWM占空比与单个横摆运动周期关系。通过线性拟合结果如图4所示,PWM占空比与横摆运动周期具有良好的线性关系,相关系数为0.9291。因此当视觉系统获得作物位置和大小后,并可根据计算得到的避苗时间 对应的所需PWM占空比值。

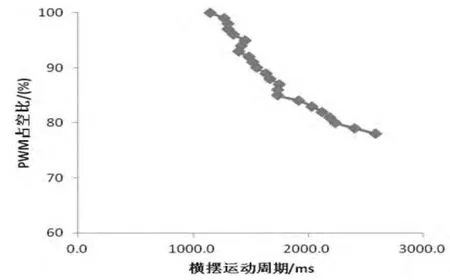
图4 PWM占空比与横摆运动周期关系
(2)作物图像坐标与大地坐标的转换
视觉系统获得的是作物在图像中的像素坐标,然而除草所需为机械除草系统所在的大地坐标系统中的实际坐标值。从图像坐标系统向大地坐标系统转换可采取转换矩阵[13],但若除草系统搭载在机器人上,保证了除草系统前进方向与作物行平行。在智能相机视野内的前进方向上放置8个白色圆盘,获取图片,并利用Matlab编程识别出白色圆盘并找标记出圆盘中心,与大地坐标一一对应,获得像素坐标与大地坐标在前进方向上的转换线性方程如式5所示,线性相关性达0.9972。

其中:Yr为前进方向的大地坐标,单位mm;为前进方向的像素坐标,单位相素。

图5 作物坐标转换
(3)避苗控制试验

图6 避苗控制试验
如图6所示,在室内将横摆除草系统安装于手推四轮小车上,智能相机向前拍摄,在前进方向上布置10个以绿色纸圆盘,用来模拟作物。以0.5m/s速度向前推动小车,横摆除草控制系统能准确避让10个模拟作物。
4 结论
采用智能相机作为图像获取、作物进行识别和定位、传感器信息采集、控制处理实现了横摆除草装置避让作物,准确控制除草割刀进出作物株间区域。智能相机的使用,无需计算机处理系统,简化了基于图像处理的横摆式株间机械除草控制系统。当然,系统需进一步改进,完善基于Labview的作物识别和定位算法,横摆除草机构等,并结合农业机器人进行田间除草作业研究。
[1] 李江国,刘占良,张晋国,等.国内外田间机械除草技术研究现状[J] .农机化研究,2006,(10):14~16.
[2] 范德耀,姚表,杨保军,等.田间杂草识别与除草技术智能化研究进展.中国农业科学[J] .2010,43(9):1823~1833.
[3] Astrand B,Baerveldt A J.An agricultural Mobile robot with visionbased perception formechanicalweed control[J] .Autonomous Robots,2002(13):21-35.
[4] Home M.An investigation into the design of cultivation systems for inter-and intra-row weed control[D] .Silsoe:Cranfield University,2003.
[5] Tillett N D,Hague T,Gruny A C,et al.Mechanicalwithin-row weed control for transplanted crops using computer vision[J] .Blosystems Engineering,2008,99(2):171-178.
[6] Griepentrog,H W,Nφrremark M,Nielsen J.Autonomous intra-row rotor weeding based on GPS[C] //2006 CIGR World Congress Agricultural Engineering for a Better World,Bonn,Germany,2006.
[7] Nφrremark M,Griepentrog H W,Nielsen J,et al.The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops[J] .Biosystems Engineering,2008,101(4):396-410.
[8] 江苏大学.一种除草机器人的六爪执行机构:中国,200810019830.3[P] .2008-08-13.
[9] 张朋举,张纹,陈树人,等.八爪式株间机械除草装置虚拟设计与运动仿真[J] .农业机械学报,2010,41(4):56-59.
[10] 陈树人,张朋举,周恩权.基于LabVIWE的八爪式株间除草装置控制及实验研究 [C] .2010国际农业工程大会论文集.2010,11:298-303.
[11] 张春龙,黄小龙,耿长兴,等.智能锄草机器人系统设计与仿真[J] .农业机械学报,2011,42(7):196-199.
[12] 胡炼,罗锡文,严乙桉,等.基于爪齿余摆运动的株间机械除草装置研制与试验[J] .农业工程学报,2012,28(14):10-16.
[13] NoguchiN,John FRied,Qin Zhang,etal.Vision Intelligence for Mobile Agro-robotic System[J] .
猜你喜欢
今日农业(2022年15期)2022-09-20 06:55:44
趣味(作文与阅读)(2022年3期)2022-06-10 02:12:00
今日农业(2021年21期)2021-11-26 05:07:00
绿色科技(2021年7期)2021-05-10 07:56:32
农机化研究(2020年10期)2020-10-17 01:04:24
机电工程技术(2018年6期)2018-08-03 01:49:50
电子技术与软件工程(2018年20期)2018-02-28 02:31:28
农机化研究(2016年11期)2016-03-23 03:33:47
中国惯性技术学报(2015年1期)2015-12-19 13:12:14
环球时报(2014-01-08)2014-01-08 18:00:04
