基于图像处理的光学瞄具故障诊断
2014-04-10 12:23吴韩飞于正林
机械与电子 2014年6期
吴韩飞,于正林,宋 庆,齐 凯
(长春理工大学机电工程学院,吉林 长春130022)
0 引言
随着科学技术的不断发展,光学瞄具的类型越来越多样化,现在世界各国对光学瞄具的发展都很重视,军用光学瞄具性能取决于其成像质量以及瞄准和测量的精度。光学瞄具的故障主要体现在成像质量下降和图像能量变化2类,共4种故障:黑斑、亮点、闪光和忽明忽暗[1],这不利于对目标像的判别。因而必须对其进行严格检测,传统的光学瞄具检测一直没有摆脱靠人眼观察判断的方法。这种检测方法精度低、速度慢、主观误差大和检测结果不能数字化显示,直接影响产品的生产成本和成品质量。随着数字图像处理技术的不断发展以及模式识别技术的广泛应用,结合数字图像处理技术、模式识别技术、CCD技术和现代光电子技术,提出一种新的光学瞄具故障诊断方法,利用数字图像处理手段,识别光学瞄具的故障,并根据模式识别理论给出故障的种类特征。基于数字图像法光学瞄具故障诊断,实现对微光瞄准镜各种光学和光电性能参数的准确、快速、简便、高效的测试,适应新武器和高科技工程对光学和光电性能参数测试的需求。
1 检测系统组成及工作原理
系统可以完成实时采集、故障判断与分类功能。能同时摄取和处理4路视频图像,通过图像处理,自动判别、提取图像故障(黑斑、亮点、闪光和忽明忽暗)。系统软件主要由获取标准图像、图像采集和图像故障判断等模块组成。工作流程如图1所示。
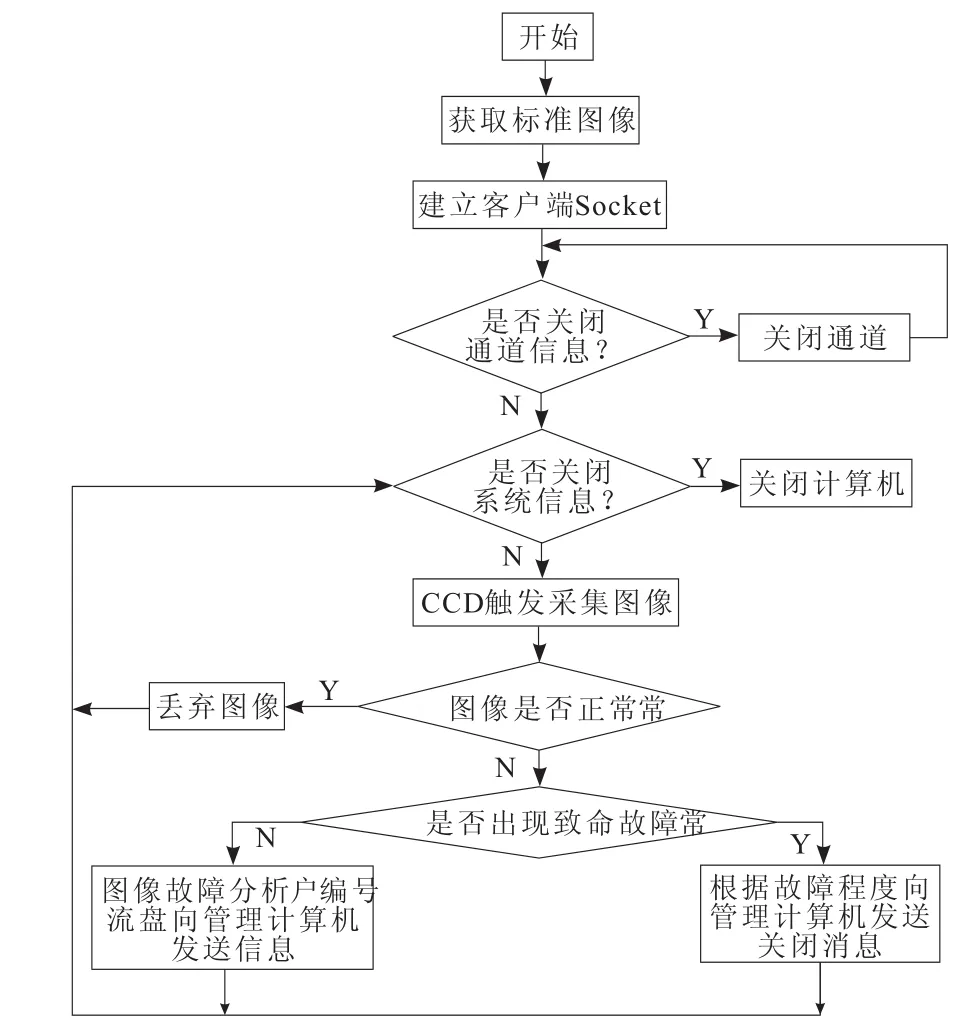
图1 图像采集与处理计算机软件流程
故障诊断系统如图2所示。整个系统装置由4台CCD相机、图像采集卡和计算机系统组成。分为成像和识别2个主要部分。有光、电、热应力系统为被测微光瞄准镜提供需要的微光环境,被测瞄准镜成像在该像增强器的荧光屏上,由被试瞄准镜出瞳处的CCD摄像机监测其工作状况,并经图像采集把图像信息送给计算机,进行识别和处理,实现对微光瞄准镜故障的自动判别。

图2 微光瞄具故障诊断系统结构
2 故障的自动检测和识别
光学瞄具图片由瞄具出瞳处的CCD相机摄取,并将其存储在计算机的数据缓冲区,然后对灰度图像进行预处理,主要包括去噪、阈值分割、图像二值化和图像复原等。之后再应用故障识别算法,将各种故障一一检出并提取。根据以上的理论,光学瞄具识别过程如图3所示。

图3 光学瞄具故障识别过程
2.1 图像预处理
2.1.1 平滑处理
图像平滑处理主要目的是去除噪声干扰。实验在获取图像过程中由于采集设备本身受到外界干扰(震动、不稳定的电磁信号等)使得拍摄的图像中部分像素点发生畸变最终形成离散的点噪声,这种噪声的特点是分布无规律,但每个噪声面积较小,一般是由1个或几个像素点构成。这种噪声称为离散点噪声,中值滤波器对处理这类脉冲噪声非常有效。
中值滤波[2]是一种非线性数字滤波器技术,它将图像中每个像素值的灰度值用其相邻像素的灰度中值代替。中值滤波原理如图4所示。
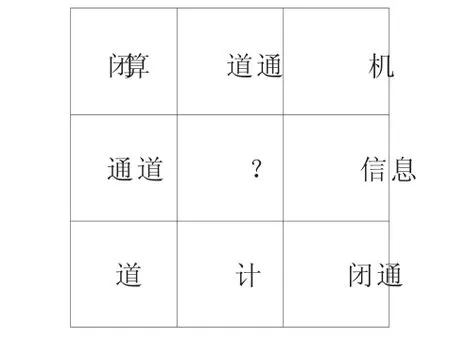
图4 中值滤波原理
图4所示的3×3的方格中,每一个方格中的数值代表1个像素点的灰度值。使用中值滤波时,窗口正中间小方格的灰度值将是运算的目标,而周围的其余8个方格就是定义中所提到的“邻域窗口”。首先,将这9个数进行排序,得到下面的灰度值序列:3,6,7,9,12,18,32,45。至于是升序排列还是降序排列,对于中值滤波器没有任何影响,因为需要的是序列正中间的数值。排序以后,选择序列的中间值,即12,它将作为中间方格的新灰度值替换掉原来的6,其他点灰度值不变。
2.1.2 开操作
开操作[3]是由腐蚀操作和膨胀操作组成,先腐蚀后膨胀称为开操作。腐蚀和膨胀这2种操作是形态学处理的基础,去除无用部分,简化图形的数据结构。设二值图像F,结构元素为B,B′代表B关于原点(0,0)对称的结构元素。图像F被结构元素膨胀的定义为:

腐蚀的定义为:

膨胀的作用是使孔洞收缩,目标扩大,对消除图像目标中的小颗粒噪声和填补凹陷是非常有效的;腐蚀的作用是目标收缩,孔洞扩大,对消除图像小颗粒噪声和目标间的粘连非常的有效。由于图像中存在噪声斑,噪声斑形成原因与表现形式与离散点噪声相类似,不同的是噪声斑与点噪声相比一般规模较大,但是数量较少。在滤噪时噪声斑滤除的难度要比点噪声大。开操作可以有效地去除噪声斑的影响。开操作经常用于去除较小的明亮细节,同时相对地保持整体的灰度级和较大的明亮区域不变;开操作的最终结果是除去或减少人为亮和暗的因素或噪声。
2.1.3 图像分割及二值化
在图像的特征提取过程中需要对图像进行二值分析来获取图像的集合特征。图像阈值化分割[4]是一种最常用,同时也是最简单的图像分割方法,它特别适用于目标和背景占据不同灰度级范围的图像。阈值分割法是一种基于区域的图像分割技术,其基本原理是,通过设定不同的特征阈值,把图像像素点分为若干类。
设原始图像f(x,y),以一定的准则在f(x,y)中找出一个合适的灰度值作为阈值t,则按上述方法分割后的图像g(x,y)为:

由此可见,阈值的选取至关重要。系统选用模糊阈值分割算法[5]。其基本思想是,先将一幅图像看做一个模糊点阵,然后通过计算图像的模糊率和模糊熵来确定最佳阈值。
将一幅M×N大小,具有L个灰度级的数字图像X看作为一个模糊点阵,μ定义为该L个灰度级熵的资格函数,像素(m,n)灰度值为xm,n。根据信息论的基本理论,可得到图像X的模糊率V(x)和模糊熵E(x)为:

其中,香浓函数定义为:

在模糊阈值算法中,以模糊率V(x)进行阈值选择,采用模糊熵E(x)也得到同样的结论。模糊集理论较好地描述了人类视觉中的模糊性和随机性,因此,在图像阈值化领域中受到广泛的关注。
2.1.4 图像减法运算
对2幅图像f(x,y)与h(x,y)进行减法运算[5],即将这2幅图像所有对应像素点的灰度值相减得:

图像减法运算最主要的作用就是获取2幅图像的差异信息,用于消除背景,故障检测。实验中将被测图像与标准图像相减,将其与亮阈值图像和暗阈值图像比较进行故障识别。
2.1.5 图像平均化
多幅图像平均法是将获取的同一景物多幅图像相加去平均,以便消弱噪声影响。设理想图像f(x,y)所受到的噪声η(x,y)为加性噪声,M 幅有噪图像经平均后得到:

多幅图像取平均处理常用于摄像机的进图中,实验中由于环境的变化用于故障识别的标准图像不唯一,故应用图像平均法对多幅图像取平均得到标准图像。
3 图像故障的识别及故障特征提取
3.1 故障特征提取
特征提取目的就是要找出将各区域分开的特征,适当地选取特征是非常重要的,因为在识别对象时它是唯一的依据。这里主要是各区域的灰度不同,图像中故障部分的灰度与背景灰度有明显的差别。依据故障像素点的个数来对各个故障进行识别和分类,即

M为测量窗口中像素点总数;N(a,b)表示故障像素点的个数。
3.2 故障模式识别
图像故障的识别采用模板匹配识别法。模板匹配即拿采集到的图像与已知的暗阈值图像和亮阈值图像去对比。
系统采用高速模板匹配方法SSDA法[6],计算图像f(x,y)在像素(μ,v)的非相似度m(μ,v)作为匹配尺度。(μ,v)表示的不是模板与图像重合部分的中心坐标,而是重合部分左上角的像素坐标。模板的大小为n×m。

如果在图像(μ,v)处有和模板一致的图案,则m(μ,v)值很小,相反则较大。由于m(μ,v)只是加减运算,而且这一计算在大多数位置中途便停止了,因此,能大幅度的缩短计算时间,提高匹配速度。
4 结果分析
4.1 主要技术指标
a.亮点。比标准图像平均亮度≥25%。
b.黑斑。目镜出瞳处视角≥8,比标准图像平均亮度≤25%。
c.闪光。与标准图像平均亮度差≥25%,闪光频率≤6次/s。
d.忽明忽暗。平均全视场亮度与标准图像亮度变化≥25%,变化频率≤6次/s。
4.2 实验结果分析
实验中采集的光学瞄具原始图像如图5a所示。对图像进行处理过程分别如图5b~5f所示。
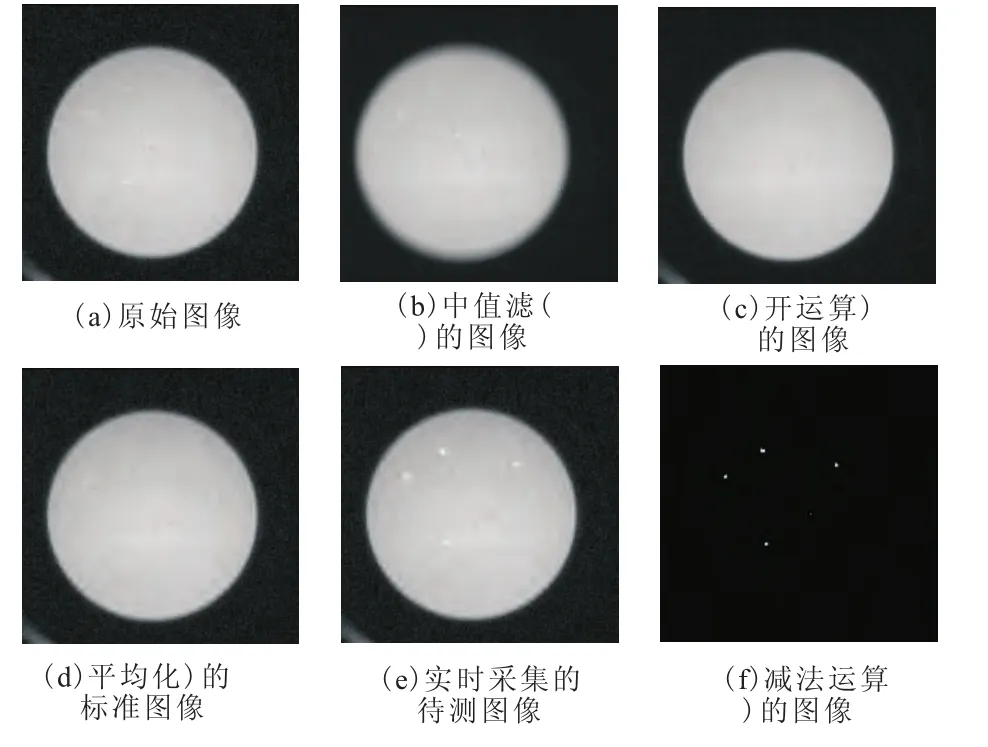
图5 图像处理过程
5 结束语
基于图像处理和模式识别理论开发的光学瞄具故障检测系统,准确有效地实现了光学瞄具故障模式的识别与诊断。故障诊断系统检测精度高,准确性好,保证了光学瞄具的产品质量。另外自动化程度高,生产效率高,而且操作简单可靠,价格低。利用计算机进行光学瞄具故障检测,除具有检测速度快和检测准确等特点外,还具有生产数据统计和故障图片存档等强大辅助功能,能适应新武器和高科技工程对光学和光电性能参数测试的需求。
[1] 杜丽婷.枪用光学瞄准镜可靠性实验设备——光、电应力系统设计[D].长春:长春理工大学,2002.
[2] 丁亚军,谢可夫.改进型中值滤波和形态学组合降噪方法[J].计算机与现代化,2007,(2):41-43.
[3] Gonzalez R C,Woods R E,Eddins S L.数字图像处理.2版[M].阮秋琦,译.北京:电子工业出版社,2014.
[4] 刘小力.机器人视觉伺服系统的图像处理和标定技术研究[D].南京:东南大学,2006.
[5] 阴国富.基于阈值法的图像分割技术[J].现代电子技术,2007,(23):107-108.
[6] 刘直芳,王运琼,朱 敏.数字图像处理与分析[M].北京:清华大学出版社,2006.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
高技术通讯(2021年3期)2021-06-09
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年1期)2016-11-07