
新型大功率光伏并网逆变器关键技术仿真研究
2014-04-08 07:04潘逸菎窦伟
电气自动化 2014年3期
潘逸菎,窦伟
(北京科诺伟业科技股份有限公司,北京 100083)
0 引言
光伏并网发电系统是当今光伏发电发展的热门方向之一,随着社会的发展和需求,很多负载设备对功率容量的要求越来越大。目前为提高光伏并网系统功率容量,主要有以下两种方法,一种是提高单台光伏并网逆变器的容量;另一种是多台光伏逆变器并联之后再并网发电。然而在光伏发电系统中,逆变器工作效率是影响系统运行效率的重要因素。通常,逆变器的工作效率除了与硬件电路设计、控制方案选择以及工作环境等因素相关外,还与逆变器的实际运行功率大小有关。大功率逆变器一般情况下工作效率较高且变化平缓,而大功率逆变器运行功率低于某一值后,系统效率将迅速降低。对于1 MW的光伏逆变器,运行功率低于5%时,逆变器最低工作效率甚至会低于30%。而光照强度是随时变化的,特别早、晚阶段光照强度较低。较低的光伏阵列输出功率造成大功率逆变器实际工作效率急剧下降。同时在实际应用中,在由于天气等因素造成逆变器运行在低功率条件时,不但引起长期发电量损失,而且向公共电网注入大量谐波电流,影响电能质量。
为提高系统在低功率条件下的工作效率和电能质量,提出了一种基于不平衡功率单元并联的1 MW光伏并网逆变器。该新型光伏并网逆变器需要在运行中进行功率单元切换,因此存在切换扰动问题,针对这一问题采用了参数可变PI调节器和功率协调控制技术,并进行了系统的仿真实验。
1 高效1 MW光伏并网逆变器结构
图1所示为高效1MW光伏并网逆变器拓扑结构图,该系统由一个控制器模块集中控制950 kW功率单元和50 kW功率单元,根据工作实际情况分别给两个功率单元发送相应的指令,协调控制两个功率单元的工作状态,根据输出功率实时调整并网功率单元,并在切换过程中达到系统的无扰切换。
其工作原理为大功率单元(950 kW)与小功率单元(50 kW)并联组成1 MW大功率逆变器,根据光伏组件阵列所产生的电能情况对开关进行控制,实现逆变器工作状态的实时切换。在低功率状态下运行时(设定为低于5%的系统额定功率,即50 kW),采用小功率单元进行电能变换,这样使得光伏系统即使在极低的运行功率下,如1%的系统额定功率(10 kW),也能保证持续运行在高效率状态(η>90%),同时可保证电流总谐波畸变率(THD)小于5%,从而大大改善输出电能质量,增加发电量,并提高整个光伏电站系统的综合效率。

图1 高效1 MW光伏并网逆变器拓扑结构图
2 高效1 MW光伏并网逆变器无扰切换控制研究
由于本方案需要根据并网功率的变化对两个功率单元进行切换,而光伏逆变器的工作特点[1-3]是并网功率随时都在变化,因此每天都需要至少两次的切换,所以在切换过程中的功率扰动是一个需要解决的问题。为了达到无扰切换,特从以下这两个方面解决:一是采用参数可变PI调节器,代替普通PI调节器;二是在切换过程中由控制器对两个并网逆变器进行功率协调控制。
2.1 参数可变PI调节器
目前并网逆变器一般采用电流和电压双闭环PI(比例-积分)控制策略,而PI控制策略多采用单系数PI控制器。从系统的整体控制效果来看,这种单系数控制方法很难兼顾动态性能和稳态性能[4]。
采用单系数PI控制器的控制系统,首先考虑的是系统的稳态性能,所以参数的选择范围偏小。由于本系统需要对两并网逆变器进行切换控制,若是仅考虑稳态性能,则在切换过程中就会产生较大的功率扰动,针对这一问题对电压环PI调节器进行了改进,采用参数可变PI调节器来代替普通PI调节器,在功率变化较大时PI调节器自动采用大参数,快速调节,在误差较小时采用小参数,便于系统的稳定控制,具体方法如下。
(1)计算当前直流母线电压与目标电压之间的误差E rr和直流母线电压的变化率d v/dt:

udc为直流母线电压,Ts为电压采样周期。
或许你会说,现在明白了,抗生素是杀细菌的,不能治疗由病毒引起的普通感冒,那用抗病毒的药去治疗普通感冒应该对吧,所以普通感冒咱就输抗病毒的药吧。很多人这样想也就这样做了,因此抗病毒的利巴韦林注射液在中国比任何国家都有市场,广泛滥用于治疗很多与病毒相关的甚至可以自愈的疾病(像普通感冒、轮状病毒感染等)。
(2)设定三个误差判断阈值,其中 δ1<δ2<δ3,当时,由于误差较大,积分项输出为零。并且系统需要尽快调整至目标值,根据PI调节的规律,应增大Kp,此设置Kp为KpMAX。
KpMAX可根据式(2)求得:

其中IMAX为电压环PI调节器输出最大值,也为电流环最大给定值。a为比例系数,可根据系统要求设定。
① 当δ2<E rr<δ3,直流母线电压小于目标值,并且d v/dt<0,误差有增大趋势,此时应增大Kp,尽快消除误差,则将所述比例系数Kp调整为:

其中:Kp(n-1)为上一次的Kp值。如果增大后的Kp值大于KpMAX,则设置为 KpMAX。
② 当-δ3<E rr< -δ2,直流母线电压大于目标值,并且d v/dt>0,误差有增大趋势,此时应增大Kp,尽快消除误差,则:


vi为误差对应的调整参数;
其中当0<E rr<δ1或 -δ1<E rr<0时,vi=v1;当 δ1<时,vi=v2;当时,vi=v3。

图2 参数可变PI调节器程序流程图
其中v3<v2<v1;Kp值应大于等于最小设定值KpMIN。如果调整后的Kp值小于KpMIN,则设置为KpMIN。下面两种情况为偏离状态为小误差状态、直流母线电压误差有减小趋势:
① 当-δ3<E rr<0,直流母线电压大于目标值,并且d v/dt<0,
② 当0<E rr<δ3,直流母线电压小于目标值,并且d v/dt>0
(5)优先的,如果E rr或d v/dt等于零时,Kp保持不变。d v/dt等于零,认为电压无趋势变化。
根据上述方法对Kp参数进行实时调整,就可以在线对PI参数进行调整,达到功率变化较大时对系统的平稳过渡控制,图2为程序控制流程图。
2.2 并网逆变器功率协调控制
并网逆变集中控制器主要是根据光伏逆变器实际的工作情况对两个逆变器进行协调控制,具体工作方式如下所述:
(1)当光伏组件电压满足并网条件时,控制器首先命令50 kW功率单元开始运行,控制方式采用电流和电压双闭环 PI控制,随着光照强度的增加,并网功率逐渐增加。当并网功率大于50 kW时,950 kW功率单元开始工作,此时通过限制950 kW功率单元电压环 PI调节器输出,调节950 kW功率单元并网功率,950 kW功率单元并网功率由刚启动的最低功率逐渐提高。通过逐渐调节950 kW功率单元并网功率,达到功率扰动变化小,便于系统平滑无扰切换。
(2)当950 kW功率单元并网功率与50kW功率单元率相同时,解除950 kW功率单元电压环限制。同时通过限制电压环输出,逐渐降低50 kW功率单元率并网功率。50 kW功率单元并网功率达到设定的最小值后停机,950 kW功率单元单独工作。当50 kW功率单元在低功率退出并网时,系统扰动小,功率切换平滑。
(3)当1 MW并网逆变器并网功率小于50 kW时。50 kW功率单元最小功率并网,并网成功后,逐渐增加50 KW功率单元并网功率。
(4)当两个光伏并网功率单元功率相同时,放开50 kW功率单元功率限制,并逐渐降低950 kW功率单元并网功率,最终将950 kW功率单元退出并网系统,由50 kW功率单元单独工作。
图3所示为950 kW功率单元并网,50 kW功率单元退出并网的程序流程图。反之50 kW功率单元并网,950 kW功率单元退出并网与图3所示过程类似。

图3 功率协调控制程序流程图
3 无扰切换仿真结果
为验证所提出控制方案的效果,基于MATLAB仿真软件对上述并网系统无扰切换控制策略进行了仿真研究[5-6],图4所示为仿真系统模型图。图4中power模块实现逆变器系统集中控制器的功能,通过该模块实现对两个并网逆变器的协调控制,该模块由s-function实现。950 kW仿真模块为950 kW功率单元,50 kW仿真模块为50 kW功率单元。

图4 高效1 MW光伏并网逆变器控制仿真模型图
参数可变PI调节器封装到了power模块内部,首先对参数可变PI调节器和普通PI调节器进行仿真验证。首先在相同的功率突变仿真条件下,分别对参数不同的单一参数PI调节器进行仿真研究。图5所示为PI调节器参数较大时的仿真波形,其中在仿真时间为1.5 s时突加功率而在2.4 s突减功率,由仿真波形可以看出,功率突变时系统反应迅速,但有轻微振动;图6所示为PI调节器参数较小时的仿真波形,其中在仿真时间为1 s时突加功率而在2 s突减功率,可以看出直流母线电压超调较大,并且震荡加剧,调节时间变长。
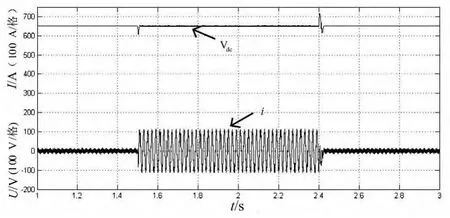
图5 普通PI调节器功率突变仿真波形图

图6 普通PI调节器小参数功率突变仿真波形图
图7所示为采用参数可变PI调节器时的仿真波形,在仿真时间1 s时突加功率而在2 s时突减功率。图7(b)所示为调节器比例参数Kp变化波形,可见调节器参数在功率变化时同时变化。当输出功率阶跃变化时,PI调节器参数自动变大,使系统动态响应性能显著提高,直流母线电压超调较小且无震荡。同时在稳态下PI调节器参数较小,提高系统的稳定性。

图7 参数可变PI调节器直流母线电压仿真波形图

图8 功率单元直接并网与退网仿真波形图

图9 功率单元功率协调控制并网与退网仿真波形图
在功率协调控制仿真中,为更好的对比切换过程中的扰动状态,两个功率单元仿真并网功率较大。图8所示为直接并网方式仿真波形图,图中Vdc为直流母线电压波形,i0为两个功率单元总并网电流波形,i1为小功率单元并网电流波形,i2为大功率单元并网电流波形。首先小功率单元单独运行,运行至0.5 s时,直接并入大功率单元,1.5 s时直接将小功率单元退出系统。由图8可见,仿真中直流母线电压和总并网电流在大功率单元并网和小功率单元退网过程中,直流母线电压有较大的波动。图9所示为本文提出的功率协调控制方法仿真结果,仿真波形对应关系与图8相同。由图9可见,在两个功率单元切换过程中,直流母线电压稳定在650 V,未出现切换扰动。
4 结束语
本文针对提出的高效光伏逆变系统中不平衡功率单元无扰切换问题进行了系统的研究,并提出了有效解决方案,
(1)采用可变参数PI调节器代替普通PI调节器,不仅能够提高系统的动态性能和稳态性能,并且可以减小扰动。
(2)通过一个控制器,对两个并网逆变器进行功率协调控制。
通过提出的解决方法,既保证了系统并联时的动态特性,实现了并网逆变器的无扰切换,实现了较好的动态和稳态控制性能。仿真结果表明,本文提出的方法可行并且解决了不同功率单元切换扰动问题,达到了无扰切换的控制目标。
[1] [1] Carcangiu G,Dainese C,Faranda R,et al.New network topologies for large scale photovoltaic Systems.Proceedings of IEEE Bucharest Power Tech[J].2009(8):1 - 7.
[2] Mohda A,Ortjohanna E,Mortonb D,etal.Review of control techniques for inverters parallel operation.Electric Power Systems Research[J].2010,80(12):1477-1487.
[3] Ma L,Lin F,You X,et al.Nonlinear PID conrol for three-phase PWM rectifier based on predictive current control[C].Proceedings of IEEE Conference on Industrial Electronics and Applications(ICIEA),2008:649-653.
[4] 高源,陈希有.一种并联稳压式独立光伏照明系统的研究[J].电气自动化,2013,35(2):35 -36.
[5] 李晶,徐洪华,赵海翔,等.并网光伏电站动态建模及仿真分析[J].电力系统自动化,2008,32(24):83 -87.
[6] 郑飞,吴蓓蓓,张军军,等.一种应用于光伏并网系统的新型数字锁相方法[J].电气自动化,2013,35(2):60-62.
猜你喜欢
山东电力高等专科学校学报(2019年5期)2019-11-01
测控技术(2018年3期)2018-11-25
宇航计测技术(2018年3期)2018-09-08
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
自动化学报(2017年4期)2017-06-15
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
汽车与新动力(2015年1期)2015-02-27
