基于磁异常检测的飞机测速定位系统的研究*
2014-04-04 06:46闫晓燕秦建敏乔记平
传感技术学报 2014年2期
闫晓燕,秦建敏,乔记平
(1.太原理工大学物理与光电工程学院,新型传感器与智能控制教育部重点实验室,太原 030024;2.中北大学仪器与电子学院,太原 030051)
从军事到民用、从客运到货运,飞机的应用已经非常普遍了[1]。对飞机位置、速度等状态信息的有效获取是保障空运安全的重要手段。在军事应用中,只有准确地获取飞机的位置信息,才能实现反空袭的精确打击。设计开发一种能在大区域范围中快速检测飞机速度及位置的系统具有很强的实际意义和应用价值[2]。
国内外对飞机测速定位系统的研究有很多,主要技术手段包括:雷达检测技术、红外成像技术、激光雷达技术以及磁力检测技术[3]。传统的雷达通过主动发射电磁波检测回波信号,从而判断目标的速度及距离信息。其技术成熟、结构简单,但其信号源容易被侦测到,而且对超、亚音速飞机难以识别,以及对低空飞行的飞机与地面物体回波容易混淆[4-5]。红外成像技术利用飞机发动机等部分产生的热辐射判断目标是否存在,例如一些攻击机上用于空空打击的定位系统。该技术隐蔽性高、可大致判断目标形状,但由于热辐射量与物体温度及被测距离都有关系,所以难以准确判断目标的位置信息,没有位置信息的辅助还影响目标速度的计算[6-7]。激光雷达技术是以激光作为辐射源的雷达系统,具有精度高、速度快等优点,但受环境影响大,不同气象条件下工作性能波动较大[8]。磁力检测技术的核心是磁力探测仪,其工作部分是由导线组成的金属敏感元件探头,通过磁力探测仪分析磁场扰动判断目标的位置及速度,目前已有用于反潜飞机的报道。其优点是被动探测隐蔽性高、基本不受天气环境的影响、虚警率低[9-11]。
本文研究的是一种通过检测磁异常判断分析飞机位置及速度的探测系统。由于飞机飞行过程中切割地磁场的磁感线,从而对地磁场造成扰动,系统通过对此扰动量进行分析计算获得飞机的位置和速度信息。根据磁力探测仪可检测的磁强度是飞机距离、飞行角度及飞行速度的函数,所以单一的磁探测器是不能完全检出的,系统通过三点定位的思想对区域内任意位置的目标进行分析,可以获得目标的准确位置及速度信息。
1 磁探测系统
1.1 基本原理
由法拉第电磁感应定律可知,电磁感应是导体在磁场中切割磁感线时,会产生感应电流的现象。感应电动势的大小与目标的尺寸、速度、切割磁感线的角度以及与磁探测器的距离存在函数关系,所以可以通过计算磁通量求解目标的相关状态信息。当对于飞机飞行过程中切割地磁场的过程而言,其感应电动势为
(1)
其中,式(1)由两部分组成,前部分是感生电动势,主要是由于飞机飞过不同区域,地磁场磁感线密度不同造成的,后部分是动生电动势,主要由于飞机切割磁力线产生的。由于地磁场一般在几公里的范围内变化很小,所以常常可以忽略此项进行计算。
飞机可以看作铁磁性物体,铁磁性物体实际上也可等效成双极性偶极子的集合体,该集合体具有固定的极化方向,与地磁场作用产生感应电动势。飞机在飞行过程中对地磁场造成扰动(如图1所示),切割磁感线产生的感应电动势携带了飞机距离、速度等信息。

图1 地磁场受飞机飞行扰动示意图
1.2 系统设计
飞机整个机身由金属制造,具有很好的电磁特性,在飞行过程中切割地磁场造成磁扰动,系统结构如图2所示。地磁场变化量由3个磁力探测仪采集,采集的数据发送给主处理系统,由接收模块接收信号。经放大滤波电路获得可以被AD处理的数字信号,最终通过处理器分析计算得到被测目标的位置及速度信息。3个磁力探测器的位置、距离都是已知的,所以当飞机以任意角度飞过3个磁力探测器覆盖的区域时,可以通过3个磁力探测器在相应方向上的磁力分量求解飞机的飞行方向、速度及准确位置。
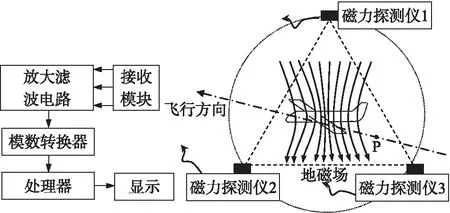
图2 飞机飞行扰动地磁场示意图

图3 铁磁介质的感应磁场及正交分解示意图
2 理论值计算及仿真分析
设探测器位置为P,飞机翼展为l,磁力探测器到飞机的距离为R。则可建立坐标如图3(a)所示,AB=l,在AB上取电流元Idl,则毕奥-萨伐尔定律求得P点磁感应强度有
(2)

(3)
由式(3)以及φ1≈φ2≈90°,R0≈r,化简可得磁感应强度有
(4)
设时变电流的角频率为ω,则感应电流有
I=I0e-jβr
(5)
其中,β=ω/c,c为光速。在大气环境中空气为弱导电媒质(电导率约等于0),磁场强度有
(6)
因为飞机的翼展是固定的,在计算磁感应强度时作为常数。而正常飞行过程中角度的变化也是很小的,所以由式(6)可知,被测磁场强度主要取决于角频率和探测距离,则对这两个参数进行仿真分析如图4所示。

图4 磁场强度H关于角频率ω和探测距离r的函数图
根据仿真结果可知,磁场强度随探测距离的增大而以指数形式下降,系统的探测距离主要取决于磁力探测器的能力,以常用磁力探测器的探测精度而言,理论上系统可实现20 km以内的飞机定位。根据仿真结果可知,磁场强度随着角频率的增大而增大,但角频率对磁场强度的影响较小。为了获取更好地检测磁场强度,可以通过增大调制频率和适当缩小探测距离的方法。距离超过1 km后,可通过仿真图中看出,磁场强度变化趋于平缓,在到4 km时,磁场强度仍保持在10-7量级上,当距离近一步增大超过10 km时,磁场强度大约下降到10-8量级,当超过20 km时,磁场强度衰减就比较明显了,与磁力探测器的检测水平相近,即大约在10-9量级。根据仿真分析可知,在100 m的距离改变下,磁力探测结果有较明显的差异,则系统的理论探测精度为100 m。由此可见,该探测模型可以实现较大区域的信号检测。
3 实验
3.1 实验环境
将飞机尺寸等比例缩小,其切割地磁场主要是机翼,所以将金属棒看作飞机机翼,其长度为10 mm×20 mm×200 mm。金属棒由皮带(非铁磁性物质,不引起感应磁场)牵引前进,有恒定的速度及行进角度。探测器采用光纤磁力探测器,记录由于金属棒造成的磁场变化。
3.2 实验结果
整个实验过程模拟飞机穿过地磁场,飞机尺寸、速度等与飞机到探测器距离等比例缩小,记录分析金属棒穿过磁场时的磁场变化。由于磁场长度与距离、金属棒切割磁感线面的长度都是线性关系,即一次正比关系,所以,按照比例关系当金属棒速度约小于飞机速度1(2个数量级时,其产生的感应磁场强度和对应距离上的强度相当,所以将金属棒的飞行速度设定在5 m/s(60 m/s之间,相当于飞机500 km/h(1 000 km/h,即可满足设计要求。则分析金属棒在不同速度下磁力探测器所采集得到的磁场强度值,再通过该磁场强度反演金属棒的速度与标准速度作对比。3个磁力探测器分别放置在等边三角形区域的3个顶角位置,金属棒以任意方向角穿过被测区域,如图3所示。当金属棒飞过被测区域时,在金属棒不同飞行速度下P点上磁力探测器的实验数据如表1所示。

表1 不同速度下3个磁力探测器的磁场强度
在金属棒从飞入磁场到飞出磁场每个位置都有不同的磁场感应强度,以上只给出了在某一时,即P点位置的磁场强度。磁场强度采集点密度由系统响应时间决定,影响系统定位的空间分辨精度。从表1中可知,随之金属棒速度的增大,感应磁场强度也随之增强,而相同速度下由于金属棒到探测器的有效距离不同,所以感应磁场强度差异也很大。将不同位置时采集到的磁场强度信息融合,就可以计算出金属棒的位置信息,而根据已知的金属棒长度、地磁强度,再代入3个磁力探测器的感应磁场强度数据,就可以计算金属棒的飞行速度了。在实际检测过程中,如果有快速飞行的导弹、炮弹碎片等也在被测区域内,对飞机测速及定位是不影响的,因为如导弹而言,飞行方向横截面不超过1 m,相比飞机机翼小得多,速度在3 Ma~6 Ma左右,引起的磁扰动要比飞机小约一个数量级,很容易区分。即使多个目标同时存在也不会有太大影响,因为3个磁力探测器是在定位的基础上实现测速的,多个弱磁相应目标由于位置不同,不产生叠加效应,相比飞机目标可以看作噪声处理。
4 结论
设计了一种通过检测感应磁场强度判断飞机穿越地磁场时的位置、速度的系统,该系统通过3个磁力探测器对穿过被测区域的飞机进行探测,由三组磁场强度数据反演飞机的速度,由多次采集的数据计算飞机的位置,从而实现飞机的定位与测速。通过理论推导及MATLAB仿真计算,在相应的测试距离中,产生的感应磁场强度可以有效地被磁力探测器采集。模拟实验采用金属棒代替飞机,按照比例关系测试磁场强度,证明了系统的可行性。
参考文献:
[1]胡海滨,龚沈光,林春生.地磁扰动时磁性目标的探测[J].探测与控制学报,2005,12:41-43.
[2]王光源,马海洋,章尧卿.航空磁探仪探潜目标磁梯度定位方法[J].兵工自动化,2011(1):36-38.
[3]唐莉莉,宋勇,童官军.一种新的运动磁目标定位算法[J].传感技术学报,2011,24(7):64-68.
[4]崔逊学,刘綦,赵温波,等.基于磁传感器的地面机动目标分类算法[J].兵工学报,2009(8):40-44.
[5]张朝阳,肖昌汉,阎辉.磁性目标的单点磁梯度张量定位方法[J].探测与控制学报,2009(4):46-50.
[6]Lenz J E.A Review of Magnetic Sensors[J].IEEE,1990,78(6):973-989.
[7]唐劲飞,龚沈光.磁偶极子模型下目标定位和参数估计的两种方法[J].电子学报2003,31(1):154-157.
[8]David Vissiere,Alain Martin,Nicolas Petit.Using Magnetic Disturbances to Improve IMU-Based Position Estimation[J].Proceedings of the European Control Conference,2007(3):1221-1224.
[9]郝林峰,王华,刘仁浩.一种利用磁场探测来计算车流量的方法[J].山西电子技术,2006(6):56-58.
[10]陈学岗,龚勇清,易江林.实用新型光纤磁场强度传感器[J].传感器技术,2001,14(12):39-41.
[11]李璐,吴峻,周文武.高速磁浮列车悬浮间隙传感器线圈结构的分析设计[J].传感技术学报,2007,20(12):58-61.
[12]邓鹏,张坚,林春生.航空磁探中水下目标的自适应探测方法[J].舰船科学技术,2012(3):78-81.

闫晓燕(1977-),女,讲师,在读博士,主要研究方向为测试计量技术及仪器等。
猜你喜欢
作文小学中年级(2023年1期)2023-02-12
小学科学(2022年23期)2023-01-30
格言·校园版(2021年22期)2021-09-27
高中数理化(2020年18期)2020-12-09
商品与质量(2019年47期)2019-06-18
农业科技与装备(2017年4期)2017-08-17
科技资讯(2017年3期)2017-03-25
物理教学探讨(2014年7期)2015-01-12
——对2013年高考新课标Ⅰ卷压轴题的已知条件的深入分析
物理通报(2014年3期)2014-06-27
中国质量与标准导报(2014年10期)2014-02-28