
基于自旋阀GMR传感器的金属磁记忆检测
2014-04-03 01:55
自动化仪表 2014年2期
(合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
0 引言
当处于地磁场中的铁磁性工件受工作载荷作用时,工件的磁性能在应力和变形集中区内会产生不可逆转的重新取向,在工件表面产生漏磁场,并在应力与变形集中区形成最大的漏磁场Hp(y)变化。金属磁记忆检测技术即通过检测漏磁场来无损、准确地确定铁磁性金属构件上的应力集中区,进而对铁磁性构件的应力集中与疲劳损伤进行早期诊断[1-2]。
近年来,磁记忆检测技术在无损检测领域蓬勃发展,在制造业、石油化工和航空等工程实践中有着广泛的应用,并取得了巨大的经济效益。然而,目前常用的传感器多为自制的线圈、磁阻传感器或霍尔传感器等,在检测精度上有一定的不足。1988年,Baibieh发现磁有序材料在一定的结构和外磁场下,其电阻会随着外磁场的改变而发生巨大变化,称其为巨磁电阻(giant magneto resistance, GMR)效应[3]。自旋阀GMR传感器是一种新型的基于GMR效应的磁场检测传感器,其检测灵敏度要比常规磁阻传感器高1~2个数量级,并且在工作过程中具有良好的线性和温度稳定性[4-5]。
为提高磁记忆检测的精确度,引入一种自旋阀GMR传感器SAS010。该传感器能够更有效地检测出铁磁性零件应力集中区的磁记忆信号法向分量Hp(y)。
1 系统组成
基于自旋阀GMR传感器的磁记忆检测装置总体结构如图1所示。
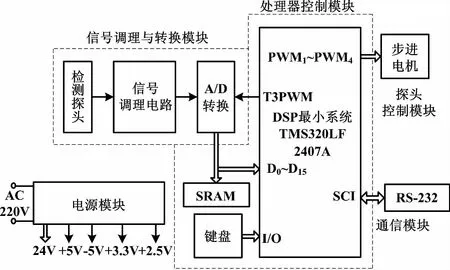
图1 检测装置总体结构框图
系统主要包括电源模块、信号调理与转换模块、处理器控制模块、通信模块等,其中信号调理与转换模块包括检测探头、信号调理电路、A/D转换模块等。
磁记忆信号Hp(y)通过检测探头被转化成电压信号,然后经信号调理电路放大、滤波处理之后,由A/D转换器将其转换成数字信号,最后通过处理器芯片读取Hp(y),并对其进行数字平滑操作。数据采集完成之后,通过串行口将数字Hp(y)信号传输给上位机PC。
2 硬件设计
2.1 电源模块
电源模块采用220 V交流电压供电,通过开关电源电路获得模拟电源(±5.0 V)和数字电源(±5.0 V、3.3 V、24.0 V、2.5 V)。模拟电源供给电路中的模拟电路部分;数字电源供给电路中的数字电路部分,其中,±5.0 V和3.3 V供给数据采集单元中的集成块使用,2.5 V供给A/D转换器作为参考电压,24.0 V供给步进电机绕组。
2.2 检测探头
检测探头采用SAS010自旋阀巨磁电阻(GMR)传感器,其电路如图2所示。
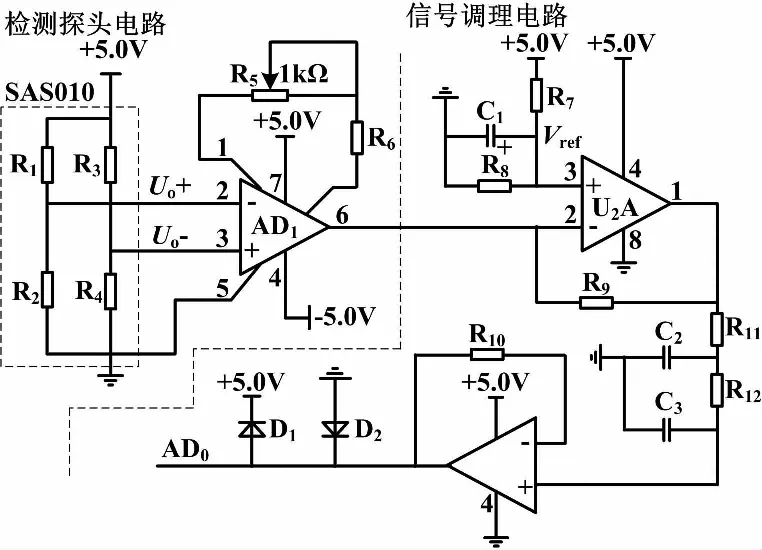
图2 检测探头与信号调理电路
图2中,AD0为输出的电压信号,由二极管D1、D2进行限压,防止过压脉冲对数模转换电路产生影响;AD1为差分放大器AD620。由图2可以看出,传感器由4个阻值均为R的巨磁电阻构成惠斯通电桥,其中R1、R4可感应到外部磁场变化,R2、R3用屏蔽层隔离[6]。电桥通电后,传感器靠近待检测工件表面,沿敏感轴方向水平移动,传感器内巨磁电阻R1、R4的阻值随着工件表面漏磁场信号Hp(y)的变化而产生巨大变化,导致电桥输出端的电压产生相应的变化。传感器由此将磁场强度转换成差分电压输出。
2.3 信号调理电路
信号调理电路对检测探头获取的磁记忆信号法向分量Hp(y)进行升压处理和低通滤波,将信号调整至0~5 V范围内,并输送到A/D转换器中。
GMR磁传感器检测试样时,输出一对差分电压信号Uo-和Uo+。Uo-和Uo+由差分放大器AD620(AD1)进行差分放大[7],AD620的放大倍数通过一款精密的电位器R5来调节,串联的100 Ω电阻R6用来防止差分放大器对信号过压放大。因此,当确定所需的电压增益后,外部的电位器的电阻RG应调节为:
(1)
式中:G为放大倍数;RG为电位器调节电阻值。
差分放大器AD620(AD1)的输出信号经过加法电路进行电压提升,并通过由运算器电路构成的二阶有源低通滤波电路进行滤波处理。二极管D1、D2对输出电压AD0进行限压防护。信号转换电路采用16位A/D转换器ADS8364[8],通过CS引脚控制其启动,CLK引脚输入其工作时钟频率。在系统检测试样时,工作时钟频率设置为2 kHz,转换频率为100 Hz。
2.4 A/D转换电路
A/D转换电路由16位ADS8364数模转器和外围电路组成,其电路如图3所示。
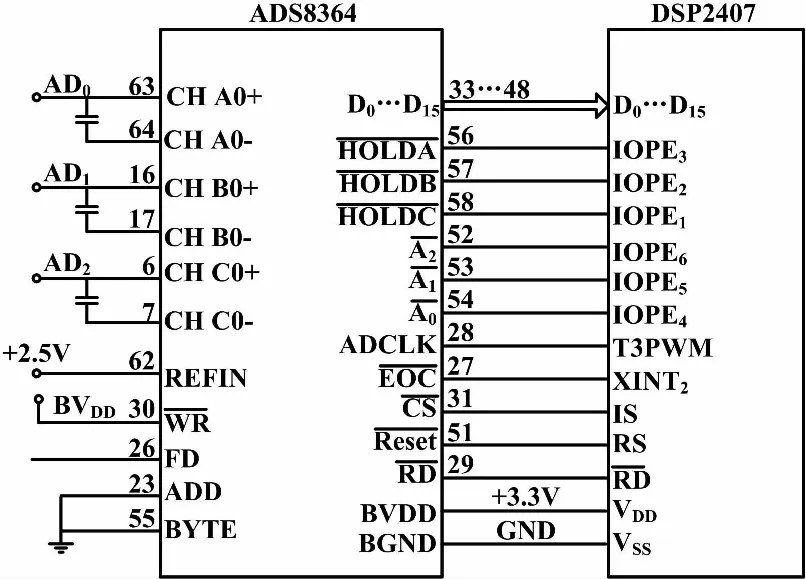
图3 数模转换电路
检测获取的单端模拟电压信号AD0~AD2通过“+”极接口输入到ADS8364芯片中,与“-”接口之间采用电容进行阻抗匹配,参考端REFIN的输入电压值为2.5 V。T3PWM为DSP2407产生的20 kHz的频率波,作为ADS8364的时钟信号。当一次数模转换完成之后,ADS8364通过第27脚输出ADCSOC信号给DSP2407处理器。第29脚接收处理器发送过来的读控制信号RD,且低电平有效。三个保持信号HOLDA、HOLDB、HOLDC分别由DSP2407的IOPE3、IOPE2、IOPE1口控制,通过保持信号的高低电平来启动指定小组(A、B、C)的通道,完成数模转换,且低电平有效。ADS8364通过设置第55引脚接地,选择16位数据输出方式。DSP2407通过A2、A1、A0三个信号来控制对ADS8364转换结果的读取方式,读取AD0、AD1、AD2的转换结果时,A2A1A0依次设置为000、001、010。
2.5 处理器控制模块
处理器控制模块由DSP2407处理器芯片构成,外部拓展(64×16)kB的SRAM存储器,以扩大系统的存储空间和仿真器对系统进行仿真调试所需的存储空间。DSP2407的T3PWM输出A/D转换器的工作频率信号f1和启动信号,信号经转换通过外部中断接口XINT2实现对数字信号的读取;然后由PWM1、PWM2、PWM3、PWM4输出步进电机的控制信号,通过处理器协调频率f1和电机控制信号频率,使二者呈一定的比例关系并同步工作,从而实现采集的数据和检测探头移动距离的精确对应关系,对暗伤部位进行精确的定位。
2.6 通信模块
检测系统与上位机PC之间的通信采用RS-232模式,传输速率设置为9 600 bit/s,并采用MAX3232芯片实现DSP2407的SCI模块与RS-232的电平匹配。
3 软件设计
3.1 下位机程序设计
下位机程序流程主要包含系统初始化模块、A/D转换器控制模块、电机驱动模块、信号平滑模块、通信模块和看门狗模块。系统初始化模块通过系统内的复位按键对主控芯片和外设的工作状态进行初始化。系统获取初始化信号之后,加载主控程序,并初始化内部的相关参数变量和关键字,同时初始化A/D转换、电机的驱动参数和通信等。由处理器DSP2407的通用定时器3产生A/D转换所需的工作频率信号f1,并通过处理器的XINT2引脚产生中断读取A/D转换结果,数据存储在SRAM中。电机驱动模块中,通过DSP2407的PWM信号来控制步进电机的匀速转动。信号平滑模块去除检测的背景磁场值和模拟电路中的电压提升值。通信模块实现数据的传输,通过上位机PC对信号做进一步的分析处理。系统通过看门狗模块防止在处理器运算时陷入死循环,维持其稳定运行。
系统运行流程如图4所示。电路通电后,首先对处理器进行初始化,然后等待输入指令,获取复位信号时,系统进行初始化操作。获取指令1时,检测试验所在环境的背景参数值,求其均值T;获取指令2时,启动数模转换电路并启动步进电机的控制信号,然后对试验对象进行检测,之后读取检测数据,并去除背景参数值T;获取指令3时,启动串行口电路,将检测数据传输到上位机中。在上位机中对检测的磁记忆信号进行数字滤波计算和梯度值计算。
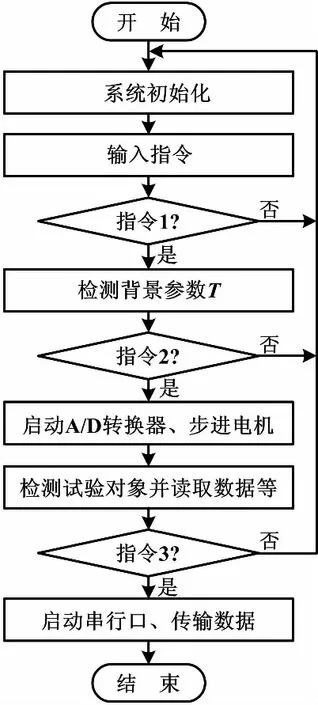
图4 系统运行流程图
3.2 采集数据处理
对采集的数据进行平滑、滤波运算。在处理器中,基于LMS的64阶自适应滤波器进行数字滤波运算。数字滤波算法[9]如下。
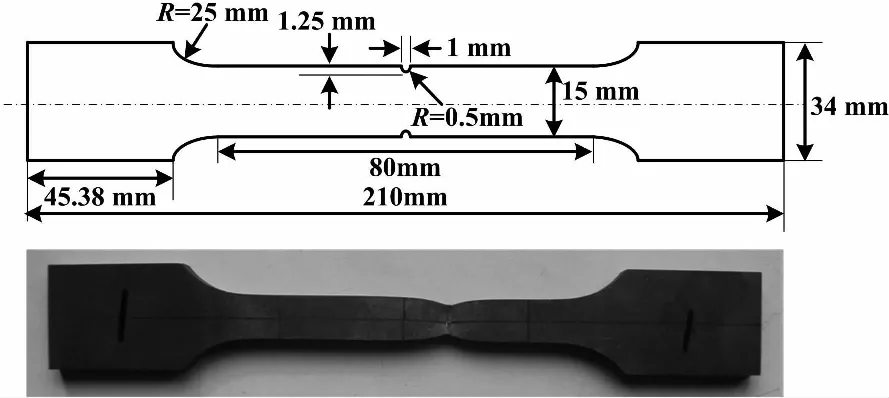
for(n=0;n ∥求输出 e(n) =d(n)-y(n); ∥求误差 w(n+1) =w(n) +u×e(n)×x(n); ∥更新滤波系数} 其中,N=64;n为自变量;x(n)为自适应滤波器的输入矢量;y(n)为自适应滤波器的输出矢量;d(n)为采集的数字信号;e(n)为误差;w(k)为滤波系数值;u为收敛因子。 下位机通过串行口将采集的数据y(n)发送到上位机PC中,然后计算出信号波形的变化率K(n),并绘制出数据的波形图。计算方法如下: K(n)=|Hp(n+1)-Hp(n)|/ΔL (2) 式中:ΔL为一个数模转换周期内丝杠滑台能够移动的水平距离;Hp(n)和Hp(n+1)分别为前后两次采集的信号电压值。 检测试样如图5所示。选用某汽车车桥板材,材料为510L,板厚6 mm。按照GB/T 2975-1998标准规定,对位置、方向、状态、方法、加工余量进行取样;试样的形状按照GB/T 228-2002的要求进行制备,试样在中心线位置加工一对对称的U口;采用MTS810型液压伺服疲劳试验机对试样进行拉伸试验,在进行拉伸试验之前先进行退磁处理。 图5 检测试样 利用开发的磁记忆检测系统对拉伸至屈服阶段的工件进行检测,通过步进电机带动检测探头,检测探头采用单通道,沿工件中心线,从起始线匀速运动到终点线,获得工件的磁记忆信号。检测出的波形如图6所示。 图6 检测波形分析 试验表明,在检测到试件的中心线U口时,磁记忆信号存在过零点,其梯度值K(n)出现最大值,可判定此处有疲劳损伤。因此,采用自旋阀GMR传感器可以有效地检测出铁磁性物质工件的缺陷或应力集中区;采集的信号通过背景去噪和自适应滤波,可以有效地去除磁记忆信号中的噪声,获得精确的磁记忆信号,为进一步的信号分析与处理提供了良好基础。 介绍了自旋阀GMR传感器在金属磁记忆检测中的应用。通过检测试验发现,自旋阀GMR传感器可以有效检测出铁磁性工件的应力集中区与损伤部位。巨磁阻传感器具有体积小、灵敏度高、线性度好、线性范围宽、温度特性好、可靠性高等特点,随着自旋阀巨磁阻传感器技术的进一步发展,其将在金属磁记忆检测中发挥更大的作用。 [1] Dubov A A.A study of metal properties using the method of magnetic memory[J].Metal Science and Heat Treatment,1997,39(9/10):401- 405. [2] Dubov A A.Study of metal properties using magnetic memory method[C]//Proceedings of the 7th European Conference on Non-destructive Testing,Copenhagen,1998:920-927. [3] ThompsonS M.The discovery,development and future of GMR:the Nobel Prize 2007[J].Journey of Physics D: Applied Physics,2008,41(9):093001-093020. [4] 陈亮,阙沛文,黄作英.一种新型磁阻式传感器在漏磁检测中的应用[J].传感器技术,2004,23(10):75-79. [5] 高扬华,张光新,黄平捷.基于GMR传感器的电涡流检测系统关键技术研究[J].传感器与微系统,2009,28(11):31-34. [6] 牛永波,冯洁,陈翔,等.基于NiFeCo/Cu多层膜巨磁电阻效应的磁微球检测[J].功能材料与器件学报,2008,14(6):1013-1018. [7] 吕志昂.微弱信号调理电路的设计[J].微型机与应用,2012,31(15):18-22. [8] 刘品,李松岩,徐赫.基于ADS8364高速数据采集模块接口设计[J].现代电子技术,2011,34(15):138-140. [9] 王丽芳,陈益平.基于DSP的自适应滤波器的实现[J].计算机仿真,2009,26(9):281-284.
3.3 K值计算
4 检测与结果
4.1 检测对象
4.2 试验结果

5 结束语
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
装备制造技术(2020年11期)2021-01-26
中学生数理化·中考版(2019年10期)2019-11-25
制造技术与机床(2019年7期)2019-07-22
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年10期)2017-11-28
汽车零部件(2014年1期)2014-09-21
微型计算机(2009年17期)2009-05-19
