
便携测量技术在轨道交通门系统中的应用
2014-04-01 06:21季献余金茜
机械制造与自动化 2014年5期
季献余,金茜
(1.南京康尼机电股份有限公司,江苏 南京 210038;2.南京工程学院,江苏 南京 211167)
0 引言
中国城市化进程的不断发展导致城市通行压力越发突出,发展轨道交通可以有效缓解这一问题,对提高城市的竞争力,创造一个可持续发展的未来,推动区域经济不断发展,具有重要的意义。城市轨道交通装备中,门系统属于关键部件,需要动作灵敏、开闭安全、配合美观、密封可靠。轨道交通装备不断创新设计发展中,其制造和装配品质也逐年提高。现代制造的高效率,要求能够在第一时间了解测量结果,对不良现象和故障原因进行分析,以便实现优化零件加工、产品装配,此特点在轨道交通行业更加显著。
传统的三坐标测量机作为一种高效的精密测量仪器是先进制造技术的重要组成部分。它测量范围大、精度高,易与柔性制造系统和计算机集成制造系统相连接,因而得到广泛的应用[1]。门系统和与之配合的车辆厂总装车体,外形尺寸大且位置相对固定。龙门式、桥式测量机等固定正交系三坐标测量机精度虽高,对使用环境温湿度要求也高,且移动不便难以满足现场测量需求,仅适用于实验室等固定场所测量。选择和实践应用现场便携测量技术,成为满足此类需求的一个途径。
1 现场便携测量设备简介
现代制造业中,固定式坐标测量机以及专用检验工艺装备等检测手段,较难适应企业的快节拍订单生产,主要原因是测量成本高,周期长效率低,很难实现通用、柔性、在线测量。在企业希望增强产品品质控制能力和应变能力的愿景下,一种趋势逐渐形成:现场便携测量产品越来越多地应用于各行业产品生产过程。技术不断发展使便携测量技术性价比提高,特别适用于企业现场的在线测量。
现场便携测量产品主要有三大类:关节臂测量机、拍照式测量机、激光跟踪仪等。便携测量设备,能够方便的应用于制造现场进行测量,克服现场温度、振动、照明、粉尘油污等环境对产品检测精度的影响。这些检测设备,广泛的应用于轨道交通、汽车制造、航空航天、船舶重工、工程机械、模具生产以及其他机电行业。
2 关节臂测量机原理、结构和数学模型
关节臂式坐标测量机也称便携式关节臂测量机(简称关节臂测量机)。不同于常见笛卡尔式正交坐标测量系统,其多自由度特点和全转动副的机械结构使关节臂测量机可测空间区域更宽。正交坐标系测量机使用的是长度测量基准,而关节臂测量机使用角度测量基准。与普通的桥式等正交三坐标测量机比较,机械结构更加简单可靠、测量范围大死区小、机身设计小巧重量较轻。
关节臂测量机一般由3 个臂关节组成:肩关节、肘关节和腕关节,如图1(a)顺时针方向。肩关节包括A 和B转轴,肘关节包括C 和D 转轴,而腕关节包括E 和F 转轴。此新颖的基于旋转关节和转动臂坐标测量系统,通过手动调整关节、转轴位置操作来实现测量。
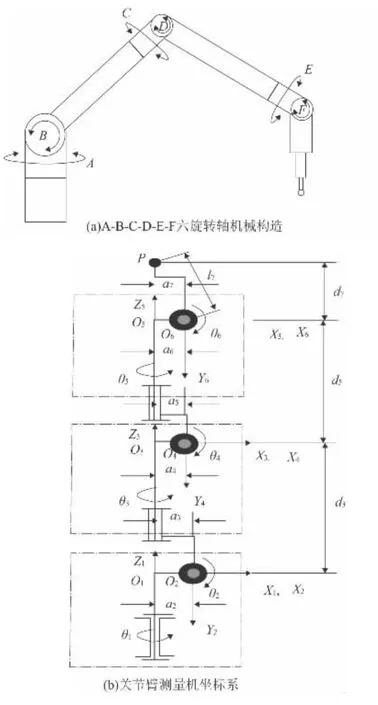
图1 关节臂式坐标测量机
便携式关节臂测量机在结构上突破直角框架的形式,坐标系建立更多的应用矢量坐标系或球坐标系。关节臂测量机末节接触式测头经过手动调整点击被测物体,3 个测量臂关节调整位置,6 个转轴绕中心轴线自转,转轴处安装的圆光栅角度传感器,利用角度编码器对“关节”的转角信息进行测量,最后一个转轴用于测头安装结构设计,末节测头通过触测工件发出信号,信号反馈到计算机,系统读取各个转轴处圆光栅实时角度值,多个转角信息经过齐次坐标变换运算后得出测头相对于测量机参考坐标系下的空间坐标数据,得出被测量点处坐标值实现三维点位坐标测量的目的。
关节臂测量机各臂关节转轴旋转角度通过角度编码器测出,图1(b)中各测量臂长度di和偏置ai数据则是已知的。利用这些数据,被测点的空间坐标位置可联立算出,前提需要确定精确的数学结构表达式,设计一个最佳计算方案。1955 年Denavit 和Hartenberg 提出一种通用方法,用一个4 ×4 齐次变换矩阵描述相邻两关节臂的空间关系,建立关节臂运动方程[2]。末节测头端P 的坐标,则通过转换矩阵T06计算得出。引入各坐标系,T06=T01T12T23T34T45T56,可推出系统的理想数学模型T06:
当i=1,3,5 时,
应该指出,这种关节臂测量机是开放式空间连杆串联结构,影响测量结果的误差因素较多,且误差传递系数大,需要对此进行计算、补偿。Denavit-Hartenberg 模型误差补偿基础理论研究和应用已逐渐成熟,在D-H参数法基础上,复合球坐标系下建立适合校准的系统数学模型,更加简洁、精确、易用。在这些理论研究的基础上,数据仿真分析对误差进行分离计算处理,系统的分析各个误差因子对关节臂测量机测量精度的影响,对每个关节、转轴进行补偿,这样可使关节臂式坐标测量机测量精度达到0.05 mm 甚至更高,基本满足现场便携测量实际精度需求。
3 轨道交通门系统在线测量应用
车体试验台架及轨道交通车体安装现场,龙门式、桥式等大型三坐标测量机无法应用,关节臂测量机的易便携测量特性,可解决门系统零部件转移不便时的测量,以及车辆车体制造和车门安装调试现场尺寸检测、分析。此类体积大、质量重、吊装转移困难的试验台架和轨道车辆,关节臂测量机是首选在线测量方式。
本文测量系统以ROMER 系列便携式关节臂测量机安装PC-DMIS 测量软件为例(图2),如ROMER 7530 绝对关节臂测量机,测量范围为3.0 m,点重复性0.033 mm,空间长度精度0.049 mm,质量8.3 kg。该系列关节臂测量机附笔记本电脑、移动电源通讯模块,配置专用设计制造的测量小车,对车体台架进行模拟测量,实践摸索适用于车体等非高精度大型装配体的检测方法。该套设备对场地、环境没有更高要求,环境温度40 ℃和湿度85%RH条件下也适用,金属测量臂仅信号连接,安全无风险,连接笔记本电脑后机体无需预热,现场随时进行测量,并能定制个性化企业信息和格式,生成检测结果报表。采用ROMER 关节臂测量机,其便携测量灵活性特点,可在复杂结构和现场接触测量过程中广泛应用。
车体试验台架和安装基面位置尺寸和公差,参照原车模型和精度要求设计制造。通过车体试验台架模拟快速在线检测,得出车体外轮廓形状和尺寸检测数据,现场生产或装配根据检测数据,检查产品基体尺寸偏差是否符合技术协议接口要求,车体外形或安装面尺寸偏差矢量值有助装配时修正、调整,根据检测数据反馈缩短调试时间,快速确定问题原因并给出解决方案。根据检测位置需求,ROMER 关节臂测量机被固定在车体试验台架内、外侧,关节臂关节灵活转动完成车体试验台架上下安装基面和车体门扇外轮廓面各个位置的测量。

图2 关节臂式坐标测量机测量系统
现场便携测量移动固定方案考虑了三脚架、磁性底座、移动小车等方案,而测量机生产厂家配置的移动支架不仅价格高,而且无法完全满足测量要求,为实现经济、适用、便捷的测量需求,设计、制造了此专用移动小车(图3)。此小车滚动转移灵活,支架可快速旋转固定,根据被测对象调节高度。关节臂测量机固定在支架四个安装底座螺纹孔上。周边不锈钢围裙结构方便,需要时灵活增加配重。

图3 测量小车
为保证关节臂测量机精度在设计的精度范围内,使用前对其进行了校准和误差补偿。精度校准发现测量臂3&4 象限摆动位置处误差超差,使用量块实物基准进行测量,然后根据偏差值进行误差补偿提高其精度。当关节臂测量机测量臂多摆动位置均有误差时,经过一定时间等温,使用桥式或龙门式三坐标测量机协助完成校准工作。关节臂测量机固定在桥式机上测出各方向量值,将桥式三坐标测量机的更高精度测值分别导入测量臂的误差模型,补偿量通过误差模型计算得出,经误差数据库全面修正测量臂空间坐标位置误差。每半年或一年的周期性调校,可以采用此方法。
下面是应用ROMER 关节臂测量机,对城轨门系统试验台架进行轮廓检测的实例(图4),用于轮廓度评价,调试安装尺寸测量和干涉数据分析。根据接口尺寸,利用三维软件solidworks 绘制车体外轮廓、安装面等结构三维图,将CAD 装配数模(<1 000 MB)导入笔记本电脑PC-DMIS 软件中,软件CAD 功能完成数模导入和坐标拟合,即可开始实际接触式选点矢量测量,关节臂测量机可依据设置允许偏差值对台架或车体外轮廓、机构安装面进行偏差结果计算,最终得出车体试验台架外轮廓是否符合轮廓度要求的结论。
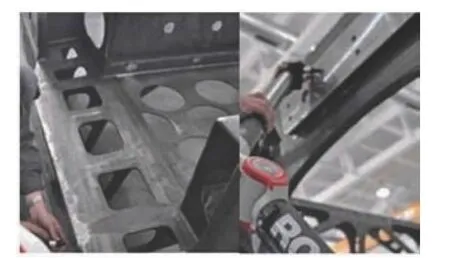
图4 测量过程图片
空气动力学需要,高铁动车组车体流线型平滑设计,门系统中门板也与车体曲面一致,实际车体试验台架坐标系UCS1与模型坐标系UCS0拟合后,出现台架实测曲面相对于模型理论曲面未完全贴合,有明显的偏移和倾斜,需要通过坐标系的调整匹配精密拟合,经过坐标变换使得测量数据尽可能地包容曲面CAD 模型,并且使测量数据与曲面之间的距离误差最小[3]。此匹配问题求解的目的就是计算欧氏变换矩阵T,使得变换后的测量数据Pi(i=1,2,……,n),尽可能包容车体试验台架曲面的CAD 模型。将所有测量点构造成特征组,使用特征组最佳拟合坐标系,PC-DMIS 软件将按照上述方法对坐标系进行最佳匹配,产生新的坐标系,使得测量数据尽可能地包容曲面CAD 模型。重新测量曲面,结果表明仅局部超差。坐标拟合困难时,使用solidworks 对原三维图进行坐标系偏移旋转处理,更合理便捷的利用现场测量特征构建基准并拟合。solidworks 软件的坐标系功能中选择新坐标系原点,选择x、y 边进行偏移、旋转、换向等操作并确认,对该新坐标系模型进行另存操作,根据需要输出格式选择IGES、STEP、Parasolid 等通用转换选项,另存界面“保存类型”选项中,选择IGES(* .igs)格式输出新建坐标系文件,类型确定后选择“选项”,输出坐标系中,选择新建适用坐标系。重新打开该IGES(* .igs)格式文件,选择保存类型为“零件(* .prt;* .sldprt),点击保存,使零件文件原点同步更新。重新导入数模,自动特征栏内的取点功能可以直接在CAD 上提取任意待检测点线面,减少数据录入工作量,检测结果在数模上图形化标示出见表1,所测量台架和门系统偏差数值有可视效果图直观显示。

表1 轮廓度检测报告
表1 中,轮廓度测定值2.551 2 mm 是与模型最佳拟合后的偏差值(未设定公差),门板误差(通用技术要求≤1.5mm)相比较车体试验台架轮廓度误差值小且误差矢量方向相同。表1 测量数据中最大值、最小值以及图5 中曲线彩色箭头矢量方向偏差,说明车体试验台架的轮廓度误差位置、方向和大小,有利于机构与门板安装调整。根据台架轮廓度误差信息结合门扇误差矢量值,通过门板驱动机构和导向装置进行综合联调,使门扇开关门运转正常、配合到位,完成门扇与车体试验台架外轮廓面的安装匹配。双开门扇闭合后,车体试验台架轮廓度值为2.6 mm,双开门扇门板安装后对车体试验台架整体轮廓度影响很小。

图5 测量点矢量方向偏差
关节臂式坐标测量机综合测试能力强,还可检测弯管件、薄壁件……,其使用灵活,检测精度有保障。通用测量软件PC-DMIS 强大的CAD 功能,提供各种形位公差测量评测数值,使关节臂测量机创新使用范围更广。已使用关节臂测量机完成对门系统产品的大型焊接件、加工件、特殊曲面件(如门扇曲面玻璃)等零部件和装配总成进行尺寸检测和品质控制,并用于保障产品品质的模具、夹具、检具等工艺装备检测方面。另实例操作,触发点测曲面等形状复杂零件表面,扫描为“点云”格式的数据文件,通过三维处理软件处理成三维实体表面,完成逆向工程操作和分析,为零件设计提供原型数据。
4 结语
使用ROMER 关节臂式坐标测量机对轨道交通产品进行准确、快捷的在线测量,为车辆门系统本体和车体配合安装质量的提高,提供了切实可行的路径。
关节臂式坐标测量机在企业生产中广泛应用,检测数据反馈及时,调整目的明确减少返工次数,产能效率提高使得供货周期缩短,降低企业生产成本,对提高产品在市场中的竞争力具有重要作用。关节臂式坐标测量机以其轻便、灵活和准确的特点,逐渐成为大型工业产品现场测量的关键计量设备。门系统产品有此测量技术保障,在轨道交通行业应用中更加可靠。而类似先进测量技术手段的研究和应用,有助企业完善其他轨道交通产品品质保障,助推新产品研制。经过不断实践创新应用,关节臂测量机在轨道交通产业中有着十分广阔的应用前景。
[1]张国雄.三坐标测量机[M].天津:天津大学出版社,1999:1-17.
[2]Denavit J,Hartenberg R.A kinematic rotation for lower pair mechanism based on matrices [J].ASME Journal of Applied Mechanics,1955,22(6):215-221.
[3]刘元朋,刘晶,张力宁,等.复杂曲面测量数据最佳匹配问题研究[J].中国机械工程,2005:1080.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年12期)2018-12-23
中国设备工程(2017年10期)2017-01-20
电力系统及其自动化学报(2016年5期)2016-12-01
光学精密工程(2016年3期)2016-11-07
工业设计(2016年7期)2016-05-04
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
河南科技(2014年8期)2014-02-27
