光电跟踪伺服系统机械时间常数频域辨识
2014-03-26 07:33:06赵建川葛仁超周俊鹏
长春工业大学学报 2014年3期
赵建川, 葛仁超, 周俊鹏, 李 焱
(1.海军驻长春地区航空军事代表室,吉林长春 130033;2.长春工业大学电气与电子工程学院,吉林长春 130012;3.中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
0 引 言
公式法由传统的电机微分方程出发,并没有给出具体实施方案和实施过程,只是利用电流与时间的关系图得到电流值的63.2%对应的时间即为机械时间常数Tm[1]。电机空载条件下运行,测出空载机械特性,从而计算出电动机转动惯量,进而从导出公式中计算出Tm,但此方法只能适应具有大转动惯量的电机,没有普遍意义的实用价值。构造更复杂的三参数最小二乘线性方程,仅仅从理论出发,没有实际工程背景,并不具有实用价值[2-3],利用扫频法测出系统输入与输出的关系,在MATLAB中的simulink环境下开发递推最小二乘在线系统辩识,有其应用的局限性,精度不是很高,卡尔曼滤波辩识算法虽然给出来精度,但运算量过大,不利于地基座伺服系统对Tm的获取[4]。另外,有些方法导出Tm和时间的积分关系,将积分转化为梯形面积[5]。有些舵机伺服系统根据跟踪精度提出了辨识、测试它的摩擦和间隙非线性及对其进行补偿的方法,跟踪误差得以改善[6-7]。分析机械时间常数与机座号的关系,得出永磁直流力矩电机机械时间常数随机座号增大而减小[8]。模糊控制系统辨识与角加速度传感器测速方面也没有完善的介绍[9-10]。设计并利用MATLAB函数拟合方法,方便灵活地解决了上述传统方法在获取电机机械时间常数不易的难题。该项技术成功的应用在XX项目中,其拟合频域法对获取电机机械时间常数有很好的通用性和借鉴性。
1 伺服系统软件实现
由旋转变压器反馈出来的速度码值用aa_0来表示,速度环开环输出码值用axk来表示。在TL16C554C口中断程序中设定axk的码值,编码器的采样周期0.002 5s,这样就可以得到旋转变压器反馈速度值aa_0。在程序的主函数中设置输出函数fprintf(fp1,"%04d%08.4lf%06ld\n",++Store_Counter,aa_0,code a_0),便于读出旋转变压器的值。在CCS3.3中通过选择存盘操作可以得到DAT文件,即可直接用word的EXCEL文件打开,选择适当值。
2 频率法的理论依据
根据电压平衡方程式和负载为零时转矩平衡方程式,以及机械时间常数、电气时间常数计算公式可得:

式中:Tm——机械时间常数;
Te——电气时间常数;
Ω(t)——电机角速度;
Ua——电机端电压。

式中:Ce——电动势常数;
Φ——磁通量。
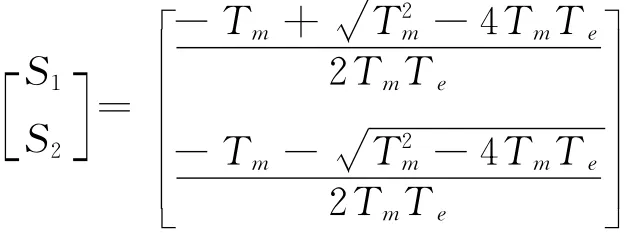
零初始条件下对式(1)做拉氏变换,可得

易得两个极点为:
将拉氏变换式转换成频率表达式为:

将f=0和f=f时两频率代入上式中做比,并代入所求得的两个极点可得
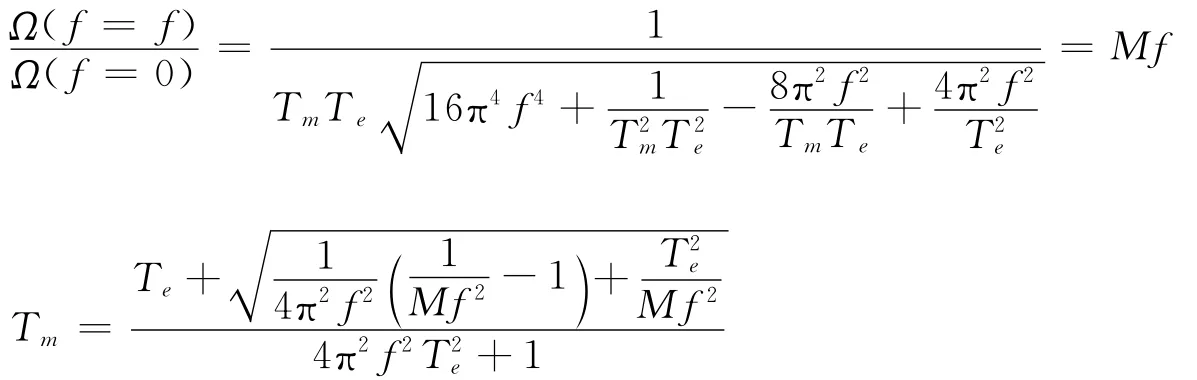
此公式作为频域法拟合依据。
3 实 验

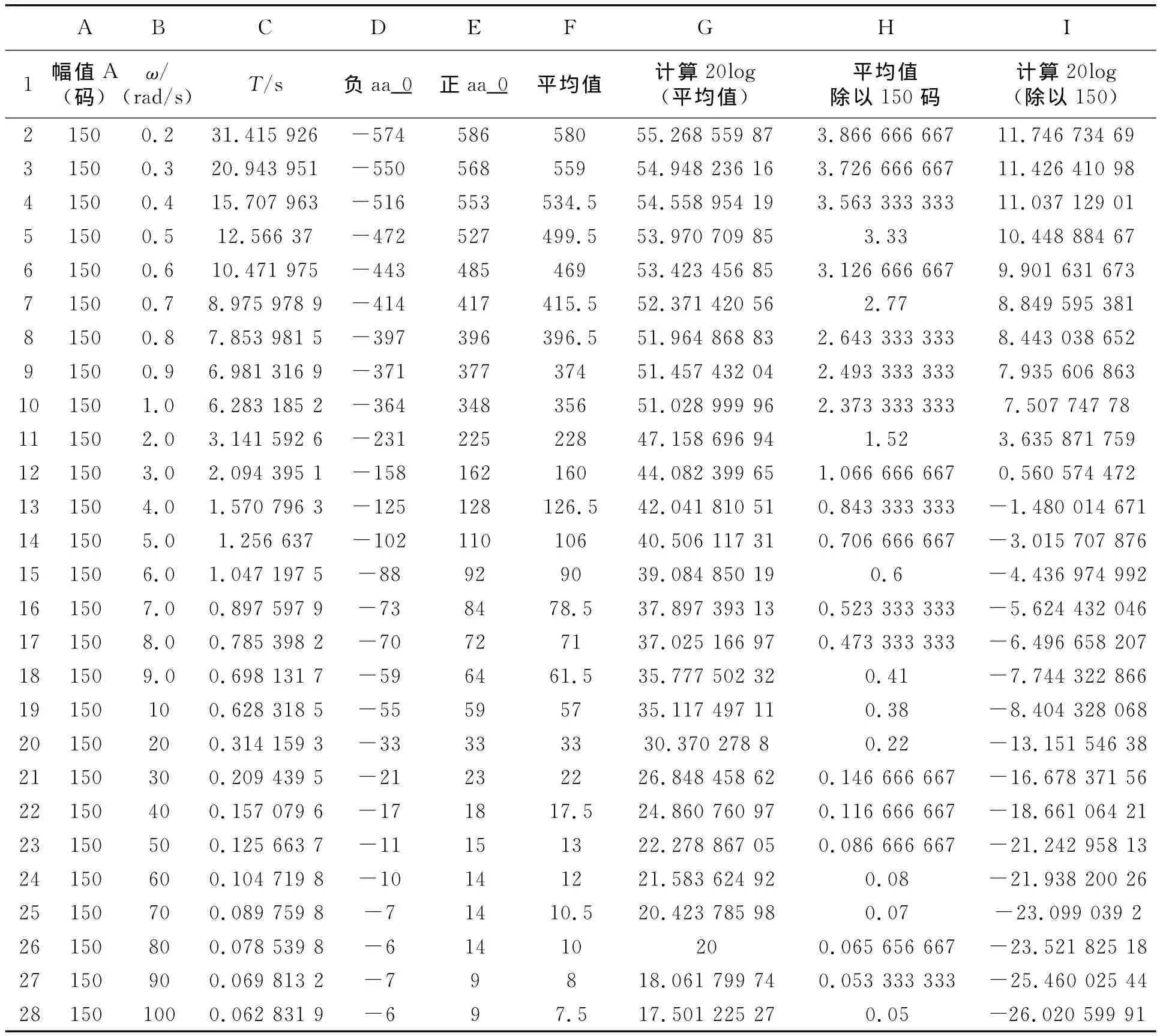
表1 正旋引导频率响应
将表1中的相关值输入到MATLAB中用对数函数拟合,拟合图如图1所示。
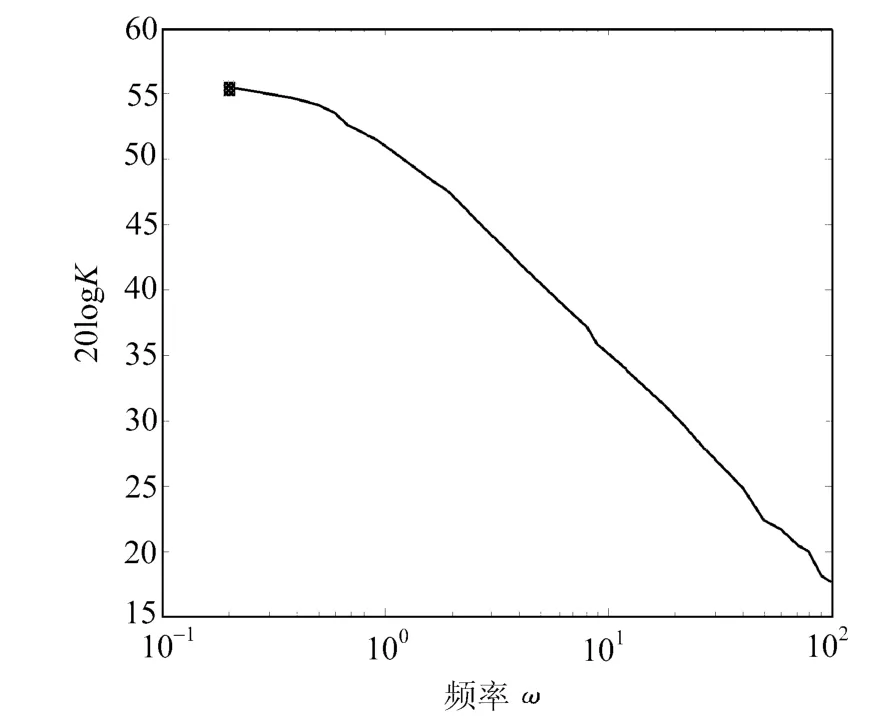
图1 频率响应拟合图
所拟合函数纵坐标为20log((正aa_0-负aa_0)/2),横坐标为ω。从BODE图中看出纵轴交点,令20logK等于纵轴交点坐标值,从而计算出K值,再除以150就可得到所需的值K0。由此值做一条横轴平行线,与转折渐近线的交点所对应的值取倒数记为机械时间常数Tm。计算得K0=4.5,Tm=1.7s,Te可通过万用表测音圈电机连同其到功率级段的导线两端的电阻和电感,实测得Te=L/R=0.002s。最终得到等效电机及负载传递函数:

4 结 语
用频率法拟和弥补了公式法获取Tm上的种种不足,并且克服了其它方法获取Tm困难、不易工程实现的难题。同时方便地得到放大倍数K,电机电气时间常数Te可通过万用表测得,从而得到电机传递函数。此方法在实际应用中方便、可行、有效,能够满足某项目对Tm的精度需要。对系统辩识具有很好的通用性和借鉴性。
[1] 菜莎莎,毛晓明,陈志勇,等.同步电机调速系统参考辩识研究进展与展望[J].广东电力,2012,25(10):29-32.
[2] 冯清青.永磁直流电机测试系统研究[D]:[硕士学位论文].哈尔滨:哈尔滨工程大学,2012.
[3] 刘琼.直流伺服系统模型及其辩识[J].电气传动自动化,2012,6(34):18-21.
[4] 王建峰,张天宏.基于MATLAB/XPC的直流电机参数辩识及双闭环控制研究[J].2011,12(30):32-36.
[5] 魏彤,郭蕊.自适应卡尔曼滤波在无刷直流电机系统辩识中的应用[J].光学精密工程,2012,10(20):2308-2314.
[6] 消前进,贾宏光,章家保,等.电动舵机伺服系统非线性辨识及补偿[J].光学精密工程,2013,21(8):2038-2047.
[7] 史建伟,史永丽.基于自抗扰动控制的伺服系统输出间隙补偿研究[J].电力学报,2009,24(2):105-108.
[8] 张文海,徐丽.永磁直流力矩电动机机械时间常数测试分析[J].微电机,2009,42(1):76-81.
[9] 郭晓锋.Fuzzy-PID控制在风力发电机上转速控制中的应用[J].长春工业大学学报:自然科学版,2004,25(2):51-54.
[10] 梁伟,冯枫,鲍学良,等.角加速度传感器及其应用[J].长春工业大学学报:自然科学版,2012,33(3):312-316.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
今日农业(2020年20期)2020-12-15 15:53:19
智慧少年·故事叮当(2020年3期)2020-04-21 13:39:56
重型机械(2019年3期)2019-08-27 00:58:52
智慧少年·故事叮当(2019年12期)2019-02-18 06:27:42
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
物探化探计算技术(2014年1期)2014-06-27 01:32:50
电气电子教学学报(2013年1期)2013-07-05 09:41:14